Zagadnienia
1. Wstęp - Co to jest ekonometria?
Podstawowe metody i cele. Przykłady modeli ekonometrycznych. Ogólna klasyfikacja modeli ekonometrycznych. (1 wykład)
1.1. Informacje wstępne
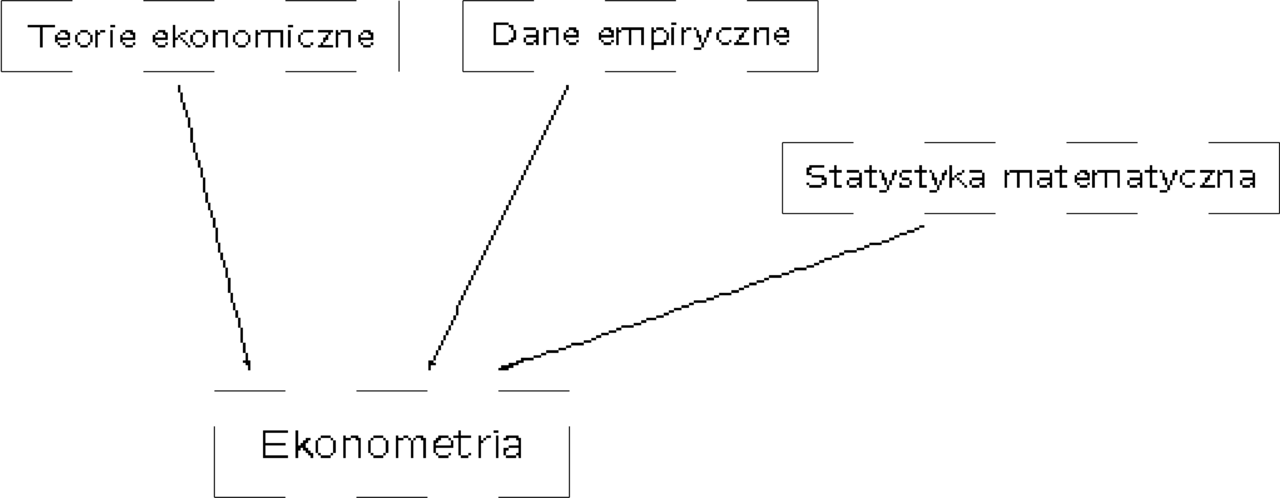
W skrócie można powiedzieć, że ekonometria to zestawienie danych empirycznych z teoriami ekonomicznymi przy zastosowaniu statystyki matematycznej.
Podstawowe cele ekonometrii to:
1. Analiza danych empirycznych i prognozowanie na ich podstawie;
2. Weryfikacja i kalibrowanie teorii ekonomicznych.
Kluczowym obiektem w ekonometrii jest tzw. model ekonometryczny. Zapisujemy go w postaci
gdzie
![]() zwykle oznacza czas – kolejny moment lub kolejny przedział czasowy (dzień, miesiąc, rok …),
ale może też oznaczać numer porządkowy obserwacji (np. firmy, której dotyczą dane czy województwa).
zwykle oznacza czas – kolejny moment lub kolejny przedział czasowy (dzień, miesiąc, rok …),
ale może też oznaczać numer porządkowy obserwacji (np. firmy, której dotyczą dane czy województwa). ![]() to wektor zmiennych objaśniających,
to wektor zmiennych objaśniających,![]() to wektor zmiennych objaśnianych,
to wektor zmiennych objaśnianych,![]() nazywa się postacią analityczną modelu, jest to funkcja o wartościach w
nazywa się postacią analityczną modelu, jest to funkcja o wartościach w ![]() ;
;
a ![]() nazywa się składnikiem losowym.
nazywa się składnikiem losowym.
1.2. Etapy modelowania
Przedstawimy teraz uproszczony schemat konstrukcji modelu ekonometrycznego.
Możemy wyróżnić trzy operacje:
Zbieramy dane historyczne (empiryczne) ![]() ,
, ![]() .
.
Konstruujemy model ![]() , gdzie
, gdzie ![]() - błąd przybliżenia.
- błąd przybliżenia.
Konstruujemy model stochastyczny ![]() , gdzie
, gdzie
![]() i
i ![]() to zmienne losowe, których realizacją są nasze obserwacje
to zmienne losowe, których realizacją są nasze obserwacje ![]() i
i ![]() ,
a
,
a ![]() to składnik losowy (też zmienne losowe).
to składnik losowy (też zmienne losowe).
Zakładamy, że w przyszłości ![]() i
i ![]() będą związane tą samą zależnością jak dotychczas.
będą związane tą samą zależnością jak dotychczas.
Proszę zwrócić uwagę, że dwie pierwsze operacje aproksymację i estymację możemy wykonać dowolnie dokładnie. Natomiast o ekstrapolacji zawsze ”matematyk teoretyk” będzie mógł powiedzieć, że to ”wróżenie z fusów”.
1.3. Przykłady
1. Model konsumpcji
Przez ![]() oznaczamy całkowity popyt konsumpcyjny w miesiącu
oznaczamy całkowity popyt konsumpcyjny w miesiącu ![]() , a przez
, a przez
![]() dochody gospodarstw domowych w tym okresie. Przyjmujemy, że
dochody gospodarstw domowych w tym okresie. Przyjmujemy, że
gdzie ![]() wydatki stałe,
wydatki stałe,
![]() część dochodów przeznaczona na konsumpcję,
a
część dochodów przeznaczona na konsumpcję,
a ![]() składnik losowy.
składnik losowy.
Zauważmy, że składnik losowy ”zawiera w sobie” wszystkie czynniki nie uwzględnione w sposób jawny w modelu.
Uwagi:
W modelu zakładamy, że ![]() i
i ![]() są stałe, a w rzeczywistości są one tylko wolno-zmienne.
Istotną wadą powyższego modelu jest nieuwzględnienie oszczędności.
są stałe, a w rzeczywistości są one tylko wolno-zmienne.
Istotną wadą powyższego modelu jest nieuwzględnienie oszczędności.
2. Model oszczędności
Przez ![]() oznaczamy stan oszczędności na koniec miesiąca
oznaczamy stan oszczędności na koniec miesiąca ![]() , a przez
, a przez
![]() dochody gospodarstw domowych w tym miesiącu. Przyjmujemy, że
dochody gospodarstw domowych w tym miesiącu. Przyjmujemy, że
gdzie ![]() wydatki stałe,
wydatki stałe,
![]() część dochodów przeznaczona na oszczędności,
część dochodów przeznaczona na oszczędności,
![]() część oszczędności przeznaczona na konsumpcję,
a
część oszczędności przeznaczona na konsumpcję,
a ![]() składnik losowy.
składnik losowy.
Uwagi:
Zauważmy, że w powyższym modelu opóźniona zmienna objaśniana jest zmienną objaśniająca.
Model 1 i 2 można połączyć i otrzymać model dwurównaniowy.
3. Model konsumpcji z uwzględnieniem oszczędności
Przez ![]() oznaczamy całkowity popyt konsumpcyjny w miesiącu
oznaczamy całkowity popyt konsumpcyjny w miesiącu ![]() ,
przez
,
przez ![]() oznaczamy stan oszczędności,
a przez
oznaczamy stan oszczędności,
a przez
![]() dochody gospodarstw domowych w tym okresie. Przyjmujemy, że
dochody gospodarstw domowych w tym okresie. Przyjmujemy, że
gdzie
Uwagi:
Na powyższym przykładzie widzimy, jak z prostszych modeli można konstruować bardziej skomplikowane.
Pytanie: Czy w ten sposób uzyskujemy lepszy opis badanego zjawiska?
Okazuje się, że nie zawsze. Wyznaczanie wartości parametrów dla bardziej złożonego modelu, jest zwykle bardziej skomplikowane i mniej dokładne. W efekcie złożony model, który jest teoretycznie lepszy, w praktyce już takim być nie musi.
4. Model popytu dla dóbr konsumpcyjnych
Przez ![]() oznaczamy popyt dla wybranego dobra konsumpcyjnego,
przez
oznaczamy popyt dla wybranego dobra konsumpcyjnego,
przez ![]() jego cenę, a przez
jego cenę, a przez ![]() dochody nabywcy. Przyjmujemy, że
dochody nabywcy. Przyjmujemy, że
Uwagi:
Jest to przykład modelu nieliniowego, który można zlinearyzować za pomocą logarytmowania.
5. Model stochastyczny kursu walutowego
Niech ![]() oznacza kurs 1 USD w EUR w dniu
oznacza kurs 1 USD w EUR w dniu ![]() . Przyjmujemy
. Przyjmujemy
Po zlogarytmowaniu otrzymujemy model błądzenia przypadkowego
6. Model wydajności pracy
Niech ![]() oznacza wydajność pracy w PLN na 1 pracownika,
a
oznacza wydajność pracy w PLN na 1 pracownika,
a ![]() techniczne uzbrojenie miejsca pracy też w PLN na 1 pracownika. Przyjmujemy
techniczne uzbrojenie miejsca pracy też w PLN na 1 pracownika. Przyjmujemy
Po zlogarytmowaniu otrzymujemy
Uwagi:
Współczynnik ![]() mierzy skalę postępu techniczno-organizacyjnego.
mierzy skalę postępu techniczno-organizacyjnego.
1.4. Klasyfikacja modeli ekonometrycznych
1. Klasyfikacja ze względu na dynamikę:
a. Modele statyczne (jednokresowe) charakteryzujące się brakiem zależności od czasu, tzn. ![]() nie zależy od czasu i wśród zmiennych objaśniających nie ma opóźnionych zmiennych objaśnianych. Przykłady 1 i 4.
nie zależy od czasu i wśród zmiennych objaśniających nie ma opóźnionych zmiennych objaśnianych. Przykłady 1 i 4.
b. Modele dynamiczne – zależne od czasu lub od opóźnionych zmiennych objaśnianych. Przykłady 2, 3, 5 i 6.
W klasie modeli dynamicznych wyróżniamy modele autoregresyjne w których zależność od czasu wiąże się tylko z występowaniem zmiennych opóźnionych. Przykłady 2, 3 i 5.
2. Klasyfikacja ze względu na postać analityczną modelu:
a. Modele liniowe, postać analityczna jest zadana przez funkcję liniową. Przykłady 1, 2 i 3.
b. Modele nieliniowe, postać analityczna nie jest zadana przez funkcję liniową.
W klasie modeli nieliniowych wyróżniamy modele multiplikatywne, które można zlinearyzować poprzez zlogarytmowanie.
Przykłady 4, 5 i 6.
2. Klasyfikacja ze względu na wymiar zmiennej objaśnianej:
a. Modele jednorównaniowe. Przykłady 1, 2, 4, 5 i 6.
b. Modele wielorównaniowe. Przykład 3.
Klasyfikacja ze względu na dynamikę wiąże się z planowanym wykorzystaniem modelu.
Do prognozowania potrzebne są modele dynamiczne. Natomiast do badania wpływu zmian konkretnych czynników wystarczy model statyczny.
Klasyfikacja ze względu na postać analityczną modelu i wymiar określa złożoność kalibracji modelu. Jeśli model jest liniowy i jednorównaniowy to istnieją ogólne, w miarę proste, algorytmy (które omówimy na dalszych wykładach) pozwalające sprawnie wyestymować parametry modelu. W przeciwnym wypadku algorytm zależy od konkretnego przypadku i zwykle jest dużo bardziej skomplikowany.


