Zagadnienia
2. Podstawowe algorytmy grafiki rastrowej
2.1. Rysowanie odcinka

Współrzędne punktów końcowych odcinka są liczbami całkowitymi;
zakładamy, że ![]() ,
, ![]() oraz
oraz ![]() .
Chcemy ,,narysować odcinek”, czyli wyznaczyć piksele najbliżej tego
odcinka, i nadać im odpowiedni kolor. Pierwsza przymiarka procedury
rysowania odcinka, czyli algorytm I, wygląda tak:
.
Chcemy ,,narysować odcinek”, czyli wyznaczyć piksele najbliżej tego
odcinka, i nadać im odpowiedni kolor. Pierwsza przymiarka procedury
rysowania odcinka, czyli algorytm I, wygląda tak:
$\Delta x$ = $x_2-x_1$; $\Delta y$ = $y_2-y_1$;
$m$ = $\Delta y/\Delta x$;
for ( $x$ = $x_1$, $y$ = $y_1$; $x$ <= $x_2$; $x$++ ) {
SetPixel ( $x$, round($y$) );
$y$ += $m$;
}
Zmienne ![]() i
i ![]() przyjmują wartości ułamkowe, a zatem muszą być typu
przyjmują wartości ułamkowe, a zatem muszą być typu
float; występuje konieczność
zaokrąglania współrzędnych, a ponadto błędy zaokrągleń
w dodawaniu ![]() mogą się kumulować. Zauważmy, że w każdej
kolumnie rastra o współrzędnych
mogą się kumulować. Zauważmy, że w każdej
kolumnie rastra o współrzędnych ![]() między
między ![]() i
i ![]() rysujemy
jeden piksel; idziemy zawsze w bok i czasem do góry — wtedy gdy
spowoduje to wybranie piksela bliżej odcinka, czyli dającego
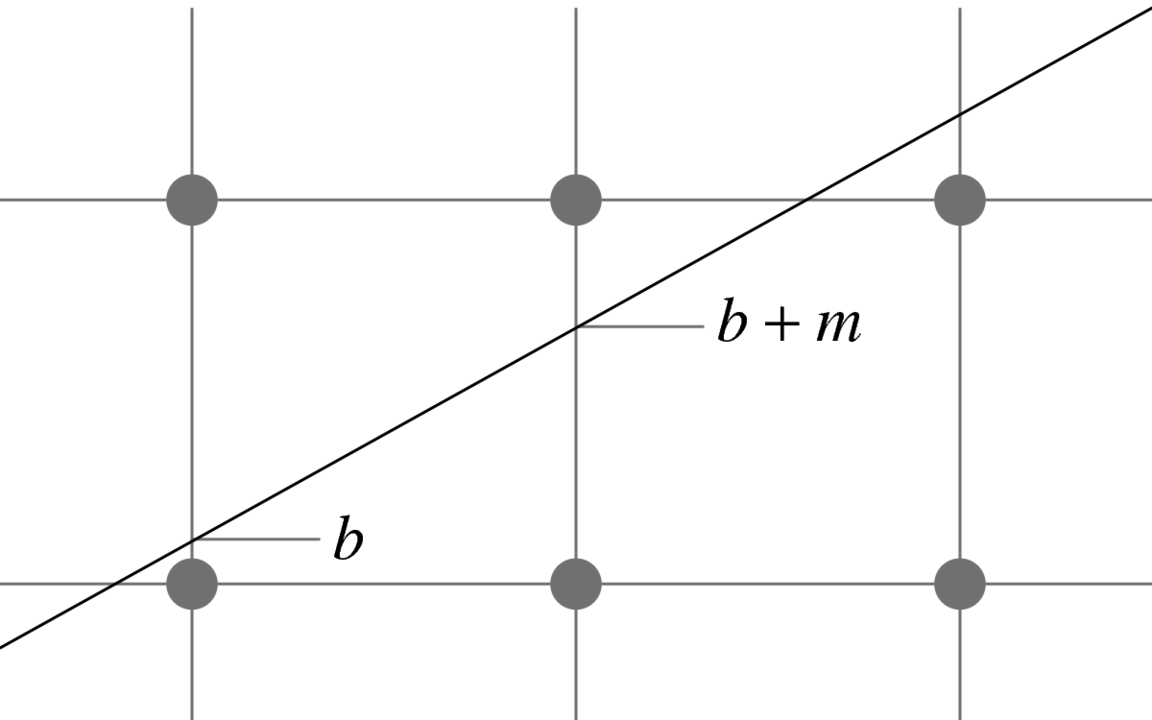
mniejszy błąd. Algorytm II jawnie
wykorzystuje to spostrzeżenie:
rysujemy
jeden piksel; idziemy zawsze w bok i czasem do góry — wtedy gdy
spowoduje to wybranie piksela bliżej odcinka, czyli dającego
mniejszy błąd. Algorytm II jawnie
wykorzystuje to spostrzeżenie:
$b$ = $0$;
$\Delta x$ = $x_2-x_1$; $\Delta y$ = $y_2-y_1$;
$m$ = $\Delta y/\Delta x$;
for ( $x$ = $x_1$, $y$ = $y_1$; $x$ <= $x_2$; $x$++ ) {
SetPixel ( $x$, $y$ );
$b$ += $m$;
if ( $b > 1/2$ ) { $y$++; $b$ -= $1$; }
}
W algorytmie II nadal używamy zmiennych ![]() i
i ![]() typu
typu real,
ale przyjmują one zawsze wartości wymierne, które można sprowadzić
do wspólnego mianownika ![]() (a także
(a także ![]() ); zatem niech
); zatem niech
![]() . Zamiast
podstawiać
. Zamiast
podstawiać ![]() +=
+= ![]() weźmy
weźmy ![]() +=
+= ![]() ; zamiast
sprawdzać warunek
; zamiast
sprawdzać warunek ![]() można sprawdzać równoważny warunek
można sprawdzać równoważny warunek ![]() .
Otrzymujemy w ten sposób algorytm III, w którym wszystkie
rachunki są wykonywane na liczbach całkowitych, bez potrzeby zaokrąglania:
.
Otrzymujemy w ten sposób algorytm III, w którym wszystkie
rachunki są wykonywane na liczbach całkowitych, bez potrzeby zaokrąglania:
$\Delta x$ = $x_2-x_1$; $\Delta y$ = $y_2-y_1$;
$c$ = $-\Delta x$;
for ( $x$ = $x_1$, $y$ = $y_1$; $x$<=$x_2$; $x$++ ) {
SetPixel ( $x$, $y$ );
$c$ += $2\Delta y$;
if ( $c$ > $0$ ) { $y$++; $c$ -= $2\Delta x$; }
}
Powyższy algorytm rysowania odcinka nazywa się algorytmem Bresenhama. Obecnie jest on powszechnie implementowany w sprzęcie, tj. procesory stosowane w sterownikach (,,kartach”) graficznych zawierają odpowiednie podukłady, które obliczają kolejne piksele rysowanych odcinków właśnie w ten sposób. Mimo to nieraz zdarza się potrzeba użycia odpowiedniego podprogramu, jeśli zadanie nie polega po prostu na wyświetleniu pikseli.
Aby narysować odcinek, którego końce nie spełniają warunków
określonych na początku, trzeba odpowiednio zamienić współrzędne
![]() i
i ![]() rolami lub zamienić znaki przyrostów współrzędnych. Procedurę
rysowania odcinka odpowiednią w każdym przypadku możemy zrealizować tak:
rolami lub zamienić znaki przyrostów współrzędnych. Procedurę
rysowania odcinka odpowiednią w każdym przypadku możemy zrealizować tak:
void DrawLine ( int x1, int y1, int x2, int y2 )
{
int deltax, deltay, g, h, c;
deltax = x2-x1;
if ( deltax > 0 ) g = +1; else g = -1;
deltax = abs(deltax);
deltay = y2-y1;
if ( deltay > 0 ) h = +1; else h = -1;
deltay = abs(deltay);
if ( deltax > deltay ) {
c = -deltax;
while ( x1 != x2 ) {
SetPixel ( x1, y1 );
c += 2*deltay;
if ( c > 0 ) { y1 += h; c -= 2*deltax; }
x1 += g;
}
}
else {
c = -deltay;
while ( y1 != y2 ) {
SetPixel ( x1, y1 );
c += 2*deltax;
if ( c > 0 ) { x1 += g; c -= 2*deltay; }
y1 += h;
}
}
} /*DrawLine*/
Zaletą tej procedury jest fakt, że odcinek zawsze jest rysowany od
pierwszego podanego końca (którego współrzędne są początkowymi
wartościami zmiennych ![]() i
i ![]() ) do drugiego. Drugi koniec
(tj. ostatni piksel obrazu odcinka) nie jest rysowany, co łatwo
jest uzupełnić, dopisując na końcu
wywołanie procedury
) do drugiego. Drugi koniec
(tj. ostatni piksel obrazu odcinka) nie jest rysowany, co łatwo
jest uzupełnić, dopisując na końcu
wywołanie procedury SetPixel ( x2, y2 ), ale jest to zbędne
(a nawet niepożądane) jeśli procedura rysująca odcinek jest używana do
narysowania łamanej.
Przyjrzyjmy się jeszcze zawartości poszczególnych wierszy, narysowanej
przez algorytm III: w wierszu ![]() mamy
mamy ![]() pikseli, w kolejnych albo
pikseli, w kolejnych albo ![]() pikseli,
albo o
pikseli,
albo o ![]() więcej, a w ostatnim — resztę. W wielu przypadkach narysowanie
jednocześnie kilku sąsiednich pikseli można zrealizować sprawniej
niż poprzez rysowanie każdego z nich osobno. Jeśli weźmiemy
więcej, a w ostatnim — resztę. W wielu przypadkach narysowanie
jednocześnie kilku sąsiednich pikseli można zrealizować sprawniej
niż poprzez rysowanie każdego z nich osobno. Jeśli weźmiemy
![]() ,
, ![]() ,
,
![]() i
i ![]() , to mamy odcinek, dla
którego
, to mamy odcinek, dla
którego ![]() ,
, ![]() i
i ![]() . Rasteryzacja tego
odcinka wymaga wyznaczenia
. Rasteryzacja tego
odcinka wymaga wyznaczenia ![]() pikseli, czyli na ogół znacznie
mniej niż odcinka wyjściowego. Przypuśćmy, że dysponujemy taką
procedurą, wywolywaną przez instrukcję
pikseli, czyli na ogół znacznie
mniej niż odcinka wyjściowego. Przypuśćmy, że dysponujemy taką
procedurą, wywolywaną przez instrukcję SetHLine ( $x_1$, $x_2$, $y$ );,
która rysuje ![]() pikseli w linii poziomej
pikseli w linii poziomej ![]() , zaczynając od
, zaczynając od ![]() (czyli bez
(czyli bez ![]() ).
Możemy jej użyć w algorytmie Bresenhama dla odcinka o końcach
).
Możemy jej użyć w algorytmie Bresenhama dla odcinka o końcach
![]() i
i ![]() . Odpowiedni
fragment programu ma postać:
. Odpowiedni
fragment programu ma postać:
if ( $y_2=y_1$ ) SetHLine ( $x_1$, $x_2+1$, $y_1$ );
else {
$\Delta x$ = $x_2-x_1$; $\Delta y$ = $y_2-y_1$;
$m$ = $\Delta x$ / $\Delta y$; $\Delta\tilde{x}$ = $\Delta x-m$*$\Delta y$;
$c$ = $-\Delta y$;
$x_3$ = $x_1-m$ / $2$; $x_4$ = $x_3+m$;
SetHLine ( $x_1$, $x_4$, $y_1$ );
for ( $y$ = $y_1+1$; $y<y_2$ ) {
$c$ = $c+2\Delta\tilde{x}$;
$x_3$ = $x_4$;
if ( $c>0$ ) { $x_4$ = $x_4+m+1$; $c$ := $c-2\Delta y$; }
else $x_4$ = $x_4+m$;
SetHLine ( $x_3$, $x_4$, $y$ );
}
SetHLine ( $x_3$, $x_2$, $y_2$ );
}
Oprócz zmniejszenia liczby obliczeń błędów dla odcinków nachylonych
pod małymi kątami, do szybkości działania tej procedury przyczynia się
fakt, że przypisanie koloru wielu pikselom położonym obok siebie
w poziomej linii rastra (przez procedurę SetHLine) może zająć
znacznie mniej czasu niż przypisywanie koloru tym pikselom po kolei, m.in. dzięki uproszczeniu obliczania adresów (w pamięci obrazu) sąsiednich
pikseli.
2.2. Rysowanie okręgu
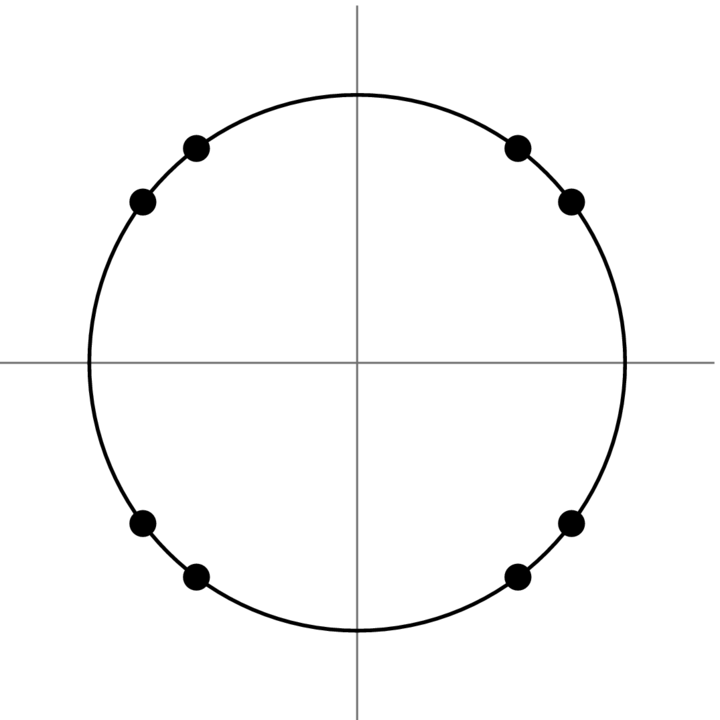
Rysując okrąg warto wykorzystać ośmiokrotną symetrię jego obrazu
rastrowego; jeśli ma on środek ![]() i zawiera piksel
i zawiera piksel ![]() ,
to zawiera on
również piksele
,
to zawiera on
również piksele ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() . Do narysowania wszystkich tych pikseli możemy
zastosować procedurę o nazwie np.
. Do narysowania wszystkich tych pikseli możemy
zastosować procedurę o nazwie np. Set8Pixels, która może też
dodać do ich współrzędnych współrzędne środka okręgu.
Wystarczy więc wyznaczyć piksele, które tworzą obraz jednej ósmej
okręgu. Zasada działania algorytmu Bresenhama rysowania okręgu jest
ta sama co w przypadku odcinka: wybieramy kolejne piksele starając się
zminimalizować błąd, tj. odległość piksela od przedstawianej na
obrazie figury.
Aby wyprowadzić algorytm rysowania okręgu, rozważmy dwie tożsamości:
 |
|||
 |
Wynika z nich, że funkcja
 |
ma wartość ![]() jeśli punkt
jeśli punkt ![]() leży na okręgu, jest dodatnia
jeśli na zewnątrz i ujemna jeśli leży wewnątrz.
Przypuśćmy, że ostatnio narysowany piksel to
leży na okręgu, jest dodatnia
jeśli na zewnątrz i ujemna jeśli leży wewnątrz.
Przypuśćmy, że ostatnio narysowany piksel to ![]() i znamy wartość
i znamy wartość
![]() . Będziemy rysowali od góry, zaczynając w punkcie
. Będziemy rysowali od góry, zaczynając w punkcie ![]() .
Rysując łuk przesuwamy się zawsze o
.
Rysując łuk przesuwamy się zawsze o ![]() piksel w prawo i czasem o
piksel w prawo i czasem o ![]() w dół — wtedy, gdy da to mniejszy błąd, czyli wtedy gdy
w dół — wtedy, gdy da to mniejszy błąd, czyli wtedy gdy
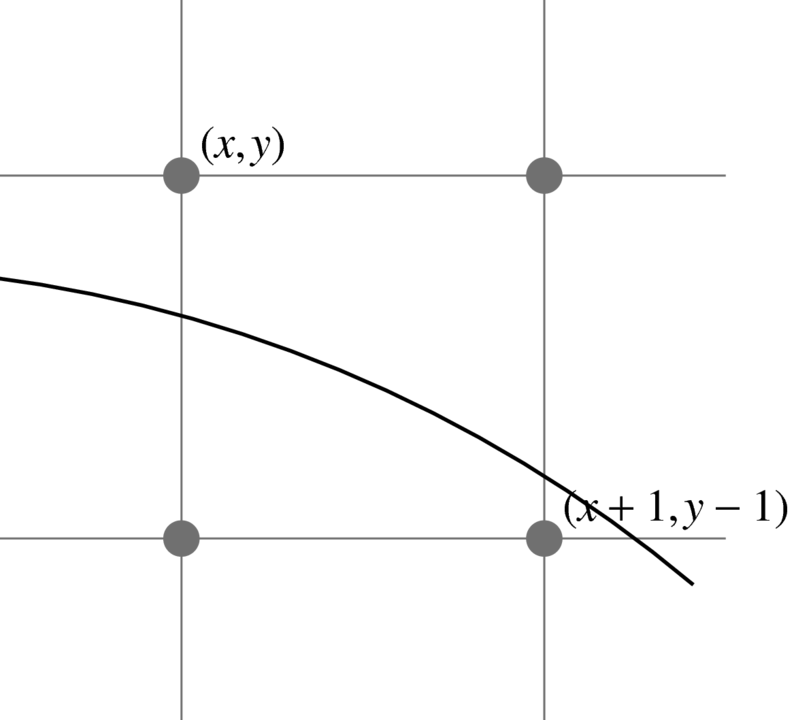
Uwaga: To nie zapewnia wyboru piksela bliżej okręgu, tylko
piksela, dla którego funkcja ![]() ma mniejszą wartość bezwzględną.
Różnica jest tak mała, że w praktyce jest nieistotna.
ma mniejszą wartość bezwzględną.
Różnica jest tak mała, że w praktyce jest nieistotna.
Mamy ![]() ,
, ![]() , a także (przyda się to za chwilę)
, a także (przyda się to za chwilę)
![]() oraz
oraz ![]() . Ponieważ rysujemy tak, aby
zawsze wybierać między dwoma pikselami które leżą po przeciwnych
stronach okręgu, więc
. Ponieważ rysujemy tak, aby
zawsze wybierać między dwoma pikselami które leżą po przeciwnych
stronach okręgu, więc ![]() . Stąd, zamiast
porównywać
. Stąd, zamiast
porównywać ![]() i
i ![]() można sprawdzać, czy
można sprawdzać, czy ![]() ,
czyli
,
czyli ![]() . Mamy więc następującą procedurę:
. Mamy więc następującą procedurę:
$x$ = $0$;
$y$ = $r$;
$c$ = $2(1-r)$;
while ( $x\leq y$ ) {
Set8Pixels ( $x$, $y$ );
if ( $2c > 1-2y$ ) { /* czasem w dół */
$y$ --;
$c$ -= $2y-1$;
}
$x$++; /* zawsze w bok */
$c$ += $2x+1$;
}
2.3. Rysowanie elips
Jeśli współczynnik aspekt rastra, czyli iloraz szerokości
i wysokości piksela (tj. odległości środka piksela od środków pikseli
sąsiednich z boku i z góry) jest różny od ![]() , to
zamiast okręgu otrzymamy elipsę; wtedy aby otrzymać obraz okręgu trzeba
narysować elipsę, której oś pionowa (mierzona liczbą pikseli) jest
aspekt razy dłuższa niż oś pozioma (mierzona też w pikselach).
Ponadto czasem potrzebujemy narysować elipsę osiach o dowolnych
długościach.
Oznaczmy długość półosi poziomej literą
, to
zamiast okręgu otrzymamy elipsę; wtedy aby otrzymać obraz okręgu trzeba
narysować elipsę, której oś pionowa (mierzona liczbą pikseli) jest
aspekt razy dłuższa niż oś pozioma (mierzona też w pikselach).
Ponadto czasem potrzebujemy narysować elipsę osiach o dowolnych
długościach.
Oznaczmy długość półosi poziomej literą ![]() , a pionowej —
, a pionowej — ![]() .
Metoda pierwsza polega na narysowaniu (za pomocą algorytmu Bresenhama
opisanego w poprzednim punkcie) okręgu o promieniu równym
długości dłuższej półosi, z procedurą
.
Metoda pierwsza polega na narysowaniu (za pomocą algorytmu Bresenhama
opisanego w poprzednim punkcie) okręgu o promieniu równym
długości dłuższej półosi, z procedurą Set8Pixels zmienioną
w ten sposób, aby zamiast SetPixel ( $x$, $y$ );
wywoływała SetPixel ( $(x$*$a)$/$b$, $y$ );
(tu jest założenie, że ![]() ) itd. Należy przy tym uważać na nadmiar
(mógłby on nas zaskoczyć, gdybyśmy używali arytmetyki szesnastobitowej).
) itd. Należy przy tym uważać na nadmiar
(mógłby on nas zaskoczyć, gdybyśmy używali arytmetyki szesnastobitowej).
Metoda druga, sporo trudniejsza, polega na narysowaniu okręgu o promieniu
![]() , za pomocą algorytmu opartego na tej samej zasadzie co algorytm
Bresenhama. W bok należy poruszać się z krokiem
, za pomocą algorytmu opartego na tej samej zasadzie co algorytm
Bresenhama. W bok należy poruszać się z krokiem ![]() , a w dół z krokiem
, a w dół z krokiem
![]() pikseli. Rastrowy obraz elipsy ma tylko czterokrotną symetrię, więc dla
każdego kolejnego punktu rysujemy tylko
pikseli. Rastrowy obraz elipsy ma tylko czterokrotną symetrię, więc dla
każdego kolejnego punktu rysujemy tylko ![]() piksele, a nie
piksele, a nie ![]() ; należy
przy tym wyznaczyć ćwiartkę elipsy, od pewnego miejsca poruszając się
zawsze w dół i czasem w bok. Również ten algorytm wymaga użycia
arytmetyki co najmniej
; należy
przy tym wyznaczyć ćwiartkę elipsy, od pewnego miejsca poruszając się
zawsze w dół i czasem w bok. Również ten algorytm wymaga użycia
arytmetyki co najmniej ![]() -bitowej dla uniknięcia nadmiaru.
-bitowej dla uniknięcia nadmiaru.
Opisane wyżej metody mają na celu rysowanie elips, których jedna oś jest pozioma, a druga pionowa. Jeśli elipsa, którą trzeba narysować nie spełnia tego warunku (tj. jest w położeniu ogólnym), to można zastosować metodę odpowiednią dla dowolnej krzywej ciągłej: wyznaczyć dostatecznie dużo punktów i narysować łamaną.
Aby narysować elipsę (lub dowolny inny obiekt), należy mieć jej odpowiednią reprezentację. Wygodne jest użycie średnic sprzężonych. Jak wiadomo, elipsa jest obrazem okręgu w pewnym przekształceniu afinicznym. Średnice sprzężone elipsy są obrazem pary prostopadłych średnic tego okręgu w tym samym przekształceniu afinicznym. Mając taką reprezentację możemy zastosować strategię ,,dziel i zdobywaj”. Mając dwa punkty końcowe łuku elipsy możemy zbadać, czy leżą one dostatecznie blisko. Jeśli tak, to narysujemy odcinek. Jeśli nie, to wyznaczymy punkt ,,środkowy” tego łuku, a następnie dwa łuki otrzymane z podziału łuku danego w wyznaczonym punkcie narysujemy stosując tę procedurę rekurencyjnie.
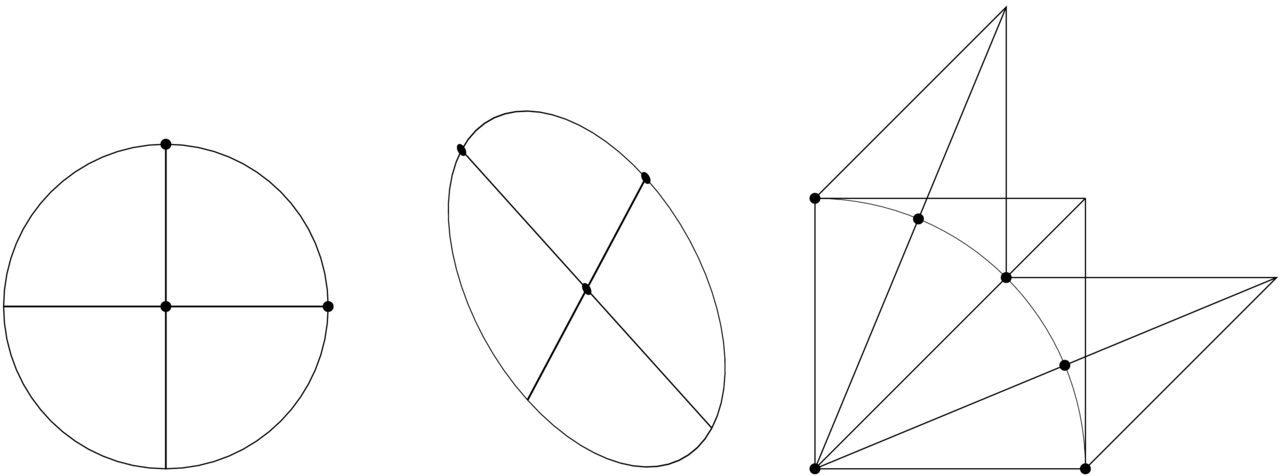
Rozważmy łuk okręgu jednostkowego o środku ![]() , którego
końce są wyznaczone przez wektory
, którego
końce są wyznaczone przez wektory ![]() i
i ![]() .
Wektor
.
Wektor ![]() , wyznaczający punkt środkowy tego łuku, jest równy
, wyznaczający punkt środkowy tego łuku, jest równy
![]() , gdzie
, gdzie ![]() .
Dalej możemy obliczyć wektory
.
Dalej możemy obliczyć wektory ![]() oraz
oraz ![]() . Ogólnie, na
. Ogólnie, na ![]() -tym poziomie
rekurencyjnego podziału łuku okręgu, sumę wektorów wyznaczających
końce łuku mnożymy przez
-tym poziomie
rekurencyjnego podziału łuku okręgu, sumę wektorów wyznaczających
końce łuku mnożymy przez ![]() .
,,Całą” procedurę rysowania elipsy za pomocą rekurencyjnego podziału
możemy zapisać tak:
.
,,Całą” procedurę rysowania elipsy za pomocą rekurencyjnego podziału
możemy zapisać tak:
void r_Elipsa ( $k$, $\bm{c}$, $\bm{v}_1$, $\bm{v}_2$ )
{
if ( dostatecznie blisko ( $\bm{v}_1$, $\bm{v}_2$ ) )
rysuj_odcinek ( $\bm{c}+\bm{v}_1$, $\bm{c}+\bm{v}_2$ );
else {
$\bm{v}_3$ = $a_k$*$(\bm{v}_1+\bm{v}_2)$;
r_Elipsa ( $k+1$, $\bm{c}$, $\bm{v}_1$, $\bm{v}_3$ );
r_Elipsa ( $k+1$, $\bm{c}$, $\bm{v}_3$, $\bm{v}_2$ );
}
} /*r_Elipsa*/
Parametry wywołania procedury przez program główny to ![]() , środek
elipsy
, środek
elipsy ![]() i wektory
i wektory ![]() i
i ![]() określające połówki
średnic sprzężonych. W przypadku, gdy są one prostopadłe i mają równą
długość, procedura narysuje ćwiartkę okręgu.
określające połówki
średnic sprzężonych. W przypadku, gdy są one prostopadłe i mają równą
długość, procedura narysuje ćwiartkę okręgu.
Współczynniki ![]() najlepiej jest zawczasu obliczyć i przechowywać
w tablicy. Zauważmy, że ograniczając głębokość rekurencji do
najlepiej jest zawczasu obliczyć i przechowywać
w tablicy. Zauważmy, że ograniczając głębokość rekurencji do ![]() ,
możemy narysować przybliżenie elipsy w postaci afinicznego obrazu
,
możemy narysować przybliżenie elipsy w postaci afinicznego obrazu
![]() -kąta foremnego, co jest wystarczające w większości zastosowań.
-kąta foremnego, co jest wystarczające w większości zastosowań.
2.4. Wypełnianie wielokątów
Dany jest ![]() -kąt, reprezentowany przez
-kąt, reprezentowany przez ![]() par
par ![]() liczb całkowitych,
określających wierzchołki. Należy zamalować piksele w jego wnętrzu.
liczb całkowitych,
określających wierzchołki. Należy zamalować piksele w jego wnętrzu.
W dobrze zaprojektowanych pakietach graficznych jest przyjęta i konsekwentnie przestrzegana umowa dotycząca rozstrzygania, czy piksel, którego środek leży na brzegu wielokąta, należy do niego, czy nie. Na przykład:

-
Jeśli środek piksela leży na krawędzi aktywnej, to piksel jest zamalowywany wtedy, gdy wnętrze wielokąta jest z prawej strony krawędzi;
-
Piksele leżące na krawędzi poziomej są zamalowywane wtedy gdy wnętrze wielokąta leży poniżej tej krawędzi.
Dzięki takiej umowie, jeśli mamy wielokąty o wspólnych krawędziach, to
każdy piksel na takiej krawędzi należy do dokładnie jednego wielokąta.
Ma to szczególne znaczenie w rysowaniu z przypisywaniem pikselom wartości
zależnej od wartości poprzedniej (np. w trybie xor itd.).
Do wykonania zadania posłuży nam następująca reguła parzystości: punkt leży wewnątrz wielokąta, jeśli dowolna półprosta, która z niego wychodzi przecina brzeg wielokąta nieparzystą liczbę razy.
Algorytm przeglądania liniami poziomymi składa się z następujących kroków:
Utwórz tablicę krawędzi (par kolejnych wierzchołków, w tym $(x_n,y_n)$,$(x_1,y_1)$);
Dla każdej krawędzi, jeśli współrzędna $y$ jej drugiego końca jest mniejsza,
zamień końce; krawędzie poziome usuń z tablicy;
Posortuj tablicę w kolejności rosnących współrzędnych $y$ pierwszego końca;
Utwórz początkowo pustą tablicę krawędzi aktywnych (t.k.a.), czyli przeciętych kolejną linią poziomą;
$y$ = współrzędna $y$ pierwszej krawędzi w tablicy;
do {
Wstaw $\mbox{do}$ t.k.a. krawędzie, których pierwszy koniec jest na linii $y$;
Oblicz dla każdej krawędzi w t.k.a. współrzędną $x$ punktu przecięcia z linią poziomą $y$;
Posortuj t.k.a. w kolejności rosnących współrzędnych $x$ punktów przecięcia;
Dla kolejnych par krawędzi aktywnych rysuj odcinek poziomy na linii $y$,
między ich punktami przecięcia z linią $y$;
$y$ ++;
Usuń z t.k.a. krawędzie, których drugi koniec jest na linii $y$;
} while ( t.k.a jest niepusta );
Uwaga: Tablica krawędzi aktywnych po każdym uaktualnieniu zawiera parzystą liczbę elementów.
2.5. Wypełnianie obszaru przez zalewanie
Przypuśćmy, że należy zamalować obszar, którego brzeg został narysowany wcześniej i obszar jest określony przez dany na początku obraz. Mamy tu więc problem z pogranicza grafiki i przetwarzania obrazów. Aby rozwiązać takie zadanie, należy je nieco uściślić, przez wprowadzenie dodatkowych pojęć.
Figura rastrowa jest czterospójna, jeśli za sąsiadów dowolnego
piksela uznajemy cztery inne piksele (dwa po bokach i po jednym powyżej
i poniżej; innymi słowy, sąsiadami piksela ![]() są
są ![]() ,
,
![]() ,
, ![]() i
i ![]() ) i dla dowolnych dwóch pikseli należących
do tej figury istnieje droga złożona z pikseli należących do niej,
z których każde dwa kolejne są sąsiadami w podanym wyżej sensie.
) i dla dowolnych dwóch pikseli należących
do tej figury istnieje droga złożona z pikseli należących do niej,
z których każde dwa kolejne są sąsiadami w podanym wyżej sensie.
Figura jest ośmiospójna, jeśli za sąsiadów piksela uznajemy
oprócz podanych wyżej jeszcze cztery piksele, które mają wspólny
narożnik z pikselem danym i dla dowolnych dwóch pikseli należących do tej
figury istnieje droga złożona z ![]() itd.
itd.
Reguły spójności odgrywają dużą rolę w rozpoznawaniu obrazów, które polega na identyfikowaniu linii i innych figur na obrazie; tymczasem zauważmy następującą regułę: brzeg obszaru ośmiospójnego jest czterospójny; brzeg obszaru czterospójnego jest ośmiospójny.
Mając określone sąsiedztwo pikseli w rastrze, dowolną figurę możemy reprezentować za pomocą grafu sąsiedztwa pikseli; jego wierzchołkami są piksele należące do figury; jego krawędziami są wszystkie krawędzie łączące wierzchołki, które są sąsiednie (w sensie jednej z powyższych definicji).
Algorytm wypełniania przez zalewanie (ang. flood fill) polega na przeszukaniu grafu sąsiedztwa pikseli obszaru, którego reprezentacją jest początkowy obraz rastrowy. Oprócz obrazu należy podać tzw. ziarno, czyli jeden piksel, który należy do obszaru, ale nie do jego brzegu. W wielu książkach jest podana procedura rekurencyjna, która stosuje metodę przeszukiwania grafu w głąb (ang. depth-first search, DFS); w wersji dla obszaru czterospójnego wygląda ona następująco:
void r_FloodFill ( $x$, $y$ )
{
if ( niezamalowany ( $x$, $y$ ) ) {
SetPixel ( $x$, $y$ );
r_FloodFill ( $x+1$, $y$ );
r_FloodFill ( $x-1$, $y$ );
r_FloodFill ( $x$, $y+1$ );
r_FloodFill ( $x$, $y-1$ );
}
} /*r_FloodFill*/
Wadą przeszukiwania w głąb jest ogromne zapotrzebowanie na pamięć
(w tym przypadku stos rekurencyjnych wywołań procedury). Trzeba się liczyć
z koniecznością przechowania na nim rekordów aktywacji procedury dla
wszystkich pikseli w obszarze (czyli np. rzędu ![]() , jeśli obszar jest
tak duży jak ekran).
, jeśli obszar jest
tak duży jak ekran).
Znacznie lepiej działa przeszukiwanie wszerz (ang. breadth-first search, BFS), które polega na użyciu kolejki. Ziarno wstawiamy do pustej kolejki, a następnie, dopóki kolejka nie jest pusta, wyjmujemy z niej piksel, i jeśli jest niezamalowany, to zamalowujemy go i wstawiamy jego sąsiadów do kolejki. Potrzebna pojemność kolejki jest rzędu liczby pikseli na brzegu obszaru.
Jeszcze sprawniejsza procedura wyznacza graf sąsiedztwa linii; jego wierzchołkami są poziome odcinki (o maksymalnej długości), złożone z pikseli należących do obszaru. Na razie tego tematu nie rozwijam.
2.6. Algorytm z pływającym horyzontem
Jednym z efektownych i użytecznych zastosowań algorytmu Bresenhama jest
rysowanie wykresów funkcji dwóch zmiennych, tj. obrazów powierzchni
![]() , z uwzględnieniem widoczności. Właśnie w tym algorytmie
potrzebna jest procedura, która obliczy piksele pewnych odcinków i dla
każdego z nich wywoła procedury, które rysowanie uzupełniają dodatkowym
obliczeniem. W takim zastosowaniu implementacja algorytmu Bresenhama
obecna w sprzęcie (w układzie grafiki komputera) jest bezużyteczna.
, z uwzględnieniem widoczności. Właśnie w tym algorytmie
potrzebna jest procedura, która obliczy piksele pewnych odcinków i dla
każdego z nich wywoła procedury, które rysowanie uzupełniają dodatkowym
obliczeniem. W takim zastosowaniu implementacja algorytmu Bresenhama
obecna w sprzęcie (w układzie grafiki komputera) jest bezużyteczna.
Algorytm rysuje wykres funkcji w danym prostokącie
![]() .
Zakładamy, że funkcja
.
Zakładamy, że funkcja ![]() w tym prostokącie jest ciągła i przyjmuje
wartości z pewnego przedziału
w tym prostokącie jest ciągła i przyjmuje
wartości z pewnego przedziału ![]() .
.
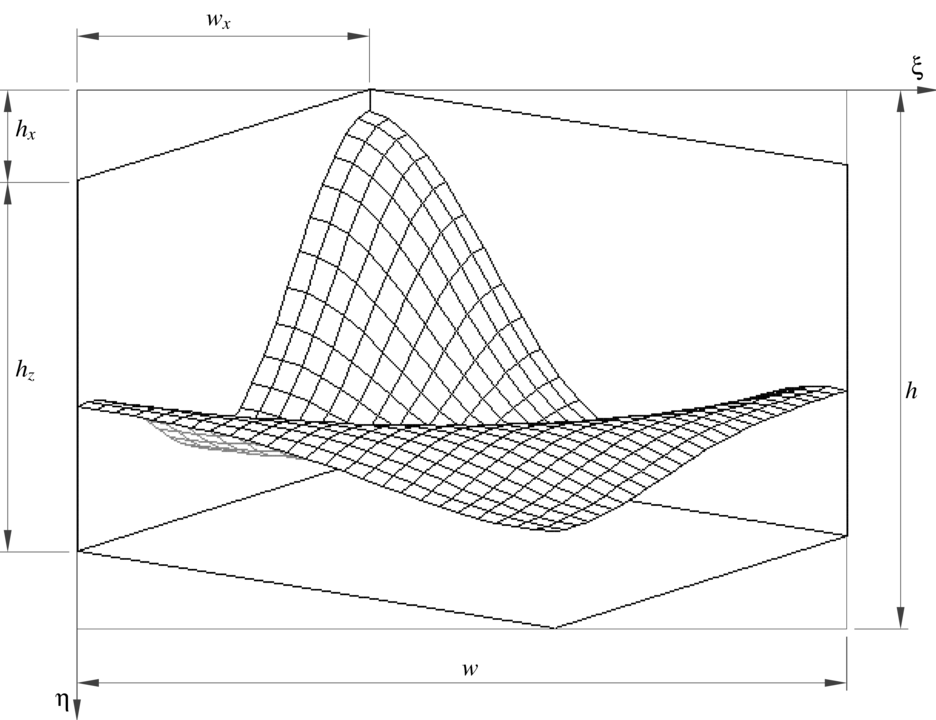
Wykres funkcji mieści się więc w kostce
![]() , której obraz powinien być
wpisany w prostokąt o szerokości
, której obraz powinien być
wpisany w prostokąt o szerokości ![]() i wysokości
i wysokości ![]() pikseli. Aby
jednoznacznie określić odwzorowanie przestrzeni trójwymiarowej na
płaszczyznę ekranu, trzeba jeszcze podać wymiary
pikseli. Aby
jednoznacznie określić odwzorowanie przestrzeni trójwymiarowej na
płaszczyznę ekranu, trzeba jeszcze podać wymiary ![]() ,
, ![]() i
i ![]() ,
zaznaczone na rysunku 2.8. Punktowi
,
zaznaczone na rysunku 2.8. Punktowi ![]() w przestrzeni
trójwymiarowej odpowiada na obrazie punkt
w przestrzeni
trójwymiarowej odpowiada na obrazie punkt ![]() , którego
współrzędne są równe
, którego
współrzędne są równe
Współczynniki ![]() , określone na podstawie podanych wymiarów
obrazu dla przedstawionej na rysunku orientacji osi układu
współrzędnych na ekranie, można obliczyć na podstawie wzorów
, określone na podstawie podanych wymiarów
obrazu dla przedstawionej na rysunku orientacji osi układu
współrzędnych na ekranie, można obliczyć na podstawie wzorów
Istotne w określeniu tego przekształcenia dla algorytmu z pływającym
horyzontem jest to, że obrazy punktów, które mają identyczne
współrzędne ![]() i
i ![]() , mają tę samą współrzędną
, mają tę samą współrzędną ![]() . Jest to
zapewnione przez przyjęcie współczynnika
. Jest to
zapewnione przez przyjęcie współczynnika ![]() .
.
Rysowanie wykresu następuje ,,od przodu do tyłu”, przy czym wcześniej
narysowane odcinki ograniczają obszar ,,zasłonięty”, w którym nie wolno
rysować. W każdej kolumnie pikseli obszar ten jest odcinkiem, którego
końcami są najwyższy i najniższy piksel narysowany wcześniej w tej
kolumnie. Dla każdej kolumny pikseli potrzebujemy zatem dwóch zmiennych
całkowitych do zapamiętania współrzędych ![]() tych pikseli. Zmienne
te są elementami dwóch tablic, zwanych horyzontami. Horyzont dolny, który
ogranicza obszar zasłonięty od dołu, w trakcie rysowania ,,obniża się”
(tj. wartości każdego elementu tej tablicy rosną).
Podobnie horyzont górny ,,podwyższa się”, przy czym początkową
wartością wszystkich elementów tych dwóch tablic jest odpowiednio
tych pikseli. Zmienne
te są elementami dwóch tablic, zwanych horyzontami. Horyzont dolny, który
ogranicza obszar zasłonięty od dołu, w trakcie rysowania ,,obniża się”
(tj. wartości każdego elementu tej tablicy rosną).
Podobnie horyzont górny ,,podwyższa się”, przy czym początkową
wartością wszystkich elementów tych dwóch tablic jest odpowiednio ![]() i
i ![]() .
.
Aby wykonać wykres obliczamy wartości funkcji ![]() w węzłach
regularnej siatki wypełniającej prostokąt
w węzłach
regularnej siatki wypełniającej prostokąt
![]() ,
obliczamy (i wpisujemy do tablicy) obrazy punktów
,
obliczamy (i wpisujemy do tablicy) obrazy punktów ![]() (po zaokrągleniu współrzędnych do liczb całkowitych), inicjalizujemy
horyzonty i rysujemy odpowiednie odcinki za pomocą algorytmu Bresenhama.
Dla każdego piksela wyznaczonego przez ten algorytm sprawdzamy, czy jest on
powyżej górnego lub poniżej dolnego horyzontu i jeśli tak, to
przypisujemy mu odpowiedni kolor. Następnie uaktualniamy horyzonty,
jako że narysowanie piksela w danej kolumnie oznacza rozszerzenie obszaru
zasłoniętego. Ale zrobienie tego natychmiast prowadzi do błędów.
Następne piksele rysowanego odcinka znajdujące się w tej samej kolumnie
też powinny zostać narysowane, a uaktualnienie horyzontu po narysowaniu
poprzedniego piksela może spowodować ich pominięcie.
(po zaokrągleniu współrzędnych do liczb całkowitych), inicjalizujemy
horyzonty i rysujemy odpowiednie odcinki za pomocą algorytmu Bresenhama.
Dla każdego piksela wyznaczonego przez ten algorytm sprawdzamy, czy jest on
powyżej górnego lub poniżej dolnego horyzontu i jeśli tak, to
przypisujemy mu odpowiedni kolor. Następnie uaktualniamy horyzonty,
jako że narysowanie piksela w danej kolumnie oznacza rozszerzenie obszaru
zasłoniętego. Ale zrobienie tego natychmiast prowadzi do błędów.
Następne piksele rysowanego odcinka znajdujące się w tej samej kolumnie
też powinny zostać narysowane, a uaktualnienie horyzontu po narysowaniu
poprzedniego piksela może spowodować ich pominięcie.
Rozwiązaniem tego problemu jest dwukrotne wywołanie algorytmu Bresenhama
dla każdego odcinka, z różnymi procedurami wywoływanymi w celu przetworzenia
pikseli. Za pierwszym razem wykonujemy test widoczności i rysowanie, a za
drugim razem uaktualniamy horyzonty. Procedura DrawLine,
realizująca algorytm Bresenhama, otrzymuje procedurę przetwarzającą
piksele jako parametr, zatem jej nagłówek musi być taki:
void DrawLine ( int x1, int y1, int x2, int y2, void (*SetPixel)(int x, int y) );
Jako ostatni parametr będziemy przekazywać dwie różne procedury.
Procedura SetPixel1 sprawdza widoczność i rysuje (wywołując ,,prawdziwą” procedurę
rysowania piksela), zaś SetPixel2 uaktualnia horyzonty.
Zmienne wdt i hgh opisują wymiary obrazu (w pikselach).
W tablicy ftab
są przechowywane końce odcinków do narysowania (w tym kodzie jest to
tablica jednowymiarowa, o długości (densx+1)*(densy+1), gdzie
parametry densx i densy określają gęstość siatki).
Tablice fhup i fhdn opisują horyzont górny i dolny
(rezerwowanie i zwalnianie pamięci na te tablice zostało
pominięte). Procedury SetPixel1 i SetPixel2 są dodatkowo
wywoływane poza procedurą DrawLine po to, aby uzupełnić brak
ich wywołania dla ostatniego piksela rysowanych odcinków
(w całym obrazie trzeba w ten sposób uzupełnić tylko jeden piksel).
Podany niżej fragment programu w C rysuje odcinki parami.
short *fhup, *fhdn;
void SetPixel1 ( int x, int y )
{
if ( y <= fhdn[x] && y >= fhup[x] )
return;
SetPixel ( x, y );
} /*SetPixel1*/
void SetPixel2 ( int x, int y )
{
if ( y > fhdn[x] ) fhdn[x] = y;
if ( y < fhup[x] ) fhup[x] = y;
} /*SetPixel2*/
...
for ( i = 0; i < wdt; i++ )
{ fhup[i] = hgh; fhdn[i] = -1; }
for ( j = k = 0; j < densy; j++, k++ ) {
pa = ftab[k]; pb = ftab[k+1];
DrawLine ( pa.x, pa.y, pb.x, pb.y, &SetPixel1 );
DrawLine ( pa.x, pa.y, pb.x, pb.y, &SetPixel2 );
}
SetPixel1 ( pb.x, pb.y ); SetPixel2 ( pb.x, pb.y );
for ( i = 1, k = densy+1; i <= densx; i++, k++ ) {
pa = ftab[k]; pb = ftab[k-densy-1];
DrawLine ( pa.x, pa.y, pb.x, pb.y, &SetPixel1 );
DrawLine ( pa.x, pa.y, pb.x, pb.y, &SetPixel2 );
for ( j = 0; j < densy; j++, k++ ) {
pb = pa; pa = ftab[k+1]; pc = ftab[k-densy];
DrawLine ( pb.x, pb.y, pa.x, pa.y, &SetPixel1 );
DrawLine ( pa.x, pa.y, pc.x, pc.y, &SetPixel1 );
DrawLine ( pb.x, pb.y, pa.x, pa.y, &SetPixel2 );
DrawLine ( pa.x, pa.y, pc.x, pc.y, &SetPixel2 );
}
}
...
Pozostaje mi zaproponować uzupełnienie tego kodu do pełnego programu,
uruchomienie, eksperymenty i dorabianie bajerów, takich jak obliczanie
kolorów pikseli zależnie od wartości funkcji ![]() , albo rozszerzenie
algorytmu umożliwiające rysowanie wykresów ,,z dziurami”.
, albo rozszerzenie
algorytmu umożliwiające rysowanie wykresów ,,z dziurami”.


