Zagadnienia
5. Modele pojedynczej populacji z uwzględnieniem wieku II
5.1. Modele z opóźnieniem
Innym sposobem wprowadzenia pewnej zależności od wieku jest modelowanie przy użyciu równań z opóźnieniem. Wróćmy do opisu dynamiki populacji za pomocą wzoru (2.1) i załóżmy, że przyrost per capita zależy nie od liczebności populacji w bieżącej chwili ![]() , ale od stanu w pewnej chwili w przeszłości
, ale od stanu w pewnej chwili w przeszłości ![]() . Kiedy tak się będzie działo? Wyobraźmy sobie populację roślinożerców, które zjadają rośliny będące w pewnym konkretnym wieku
. Kiedy tak się będzie działo? Wyobraźmy sobie populację roślinożerców, które zjadają rośliny będące w pewnym konkretnym wieku ![]() i jest to jednocześnie wiek, w którym te rośliny rozsiewają nasiona. Jeśli roślina zostanie zjedzona, to nie rozsieje nasion, a wtedy w przyszłości osobniki opisywanej populacji nie mają co jeść. Ilość zjedzonych roślin zależy od stanu populacji w bieżącej chwili, zatem ilość jedzenia w przyszłości, czyli przyrost per capita, zależy od tego stanu. Przy takich założeniach równanie na przyrost per capita przyjmuje postać
i jest to jednocześnie wiek, w którym te rośliny rozsiewają nasiona. Jeśli roślina zostanie zjedzona, to nie rozsieje nasion, a wtedy w przyszłości osobniki opisywanej populacji nie mają co jeść. Ilość zjedzonych roślin zależy od stanu populacji w bieżącej chwili, zatem ilość jedzenia w przyszłości, czyli przyrost per capita, zależy od tego stanu. Przy takich założeniach równanie na przyrost per capita przyjmuje postać
 |
W szczególności równanie logistyczne z opóźnieniem zaproponowane przez G. E. Hutchinsona w 1948 r. zapiszemy jako
| (5.1) |
Oczywiste jest, że przy opisanym powyżej modelu heurystycznym powinniśmy rozważać nie dokładnie jedno ustalone opóźnienie ![]() , ale pewien rozkład opóźnienia, gdyż nie ma w naturze takich roślin, które rozsiewałyby nasiona dokładnie w danym wieku, ale jak zwykle staraliśmy się zbudować jak najprostszy model, zatem przyjęliśmy uproszczenie polegające na ustaleniu opóźnienia
, ale pewien rozkład opóźnienia, gdyż nie ma w naturze takich roślin, które rozsiewałyby nasiona dokładnie w danym wieku, ale jak zwykle staraliśmy się zbudować jak najprostszy model, zatem przyjęliśmy uproszczenie polegające na ustaleniu opóźnienia ![]() .
.
Chcemy zbadać zależność rozwiązań równania (5.1) od wielkości opóźnienia ![]() . Zajmiemy się najpierw omówieniem podstawowych własności, takich jak istnienie, jednoznaczność i nieujemność rozwiązań dla nieujemnego warunku początkowego. Zauważmy, że aby rozwiązać równanie z opóźnieniem
. Zajmiemy się najpierw omówieniem podstawowych własności, takich jak istnienie, jednoznaczność i nieujemność rozwiązań dla nieujemnego warunku początkowego. Zauważmy, że aby rozwiązać równanie z opóźnieniem ![]() nie wystarczy, że określimy początkową liczebność populacji
nie wystarczy, że określimy początkową liczebność populacji ![]() , ale musimy zadać funkcję początkową określoną na przedziale długości opóźnienia, czyli
, ale musimy zadać funkcję początkową określoną na przedziale długości opóźnienia, czyli ![]() . Typowo w teorii równań różniczkowych z opóźnionym argumentem zakładamy, że funkcja początkowa jest ciągła, ale nie zawsze jest to założenie konieczne. W szczególności — znając funkcję początkową
. Typowo w teorii równań różniczkowych z opóźnionym argumentem zakładamy, że funkcja początkowa jest ciągła, ale nie zawsze jest to założenie konieczne. W szczególności — znając funkcję początkową ![]() możemy rozwiązać równanie (5.1) metodą kroków, o ile tylko funkcja początkowa jest całkowalna. Dokładniej, niech
możemy rozwiązać równanie (5.1) metodą kroków, o ile tylko funkcja początkowa jest całkowalna. Dokładniej, niech ![]() . Wtedy
. Wtedy
 |
czyli
![N(t)=N_{0}(0)\text{exp}\left(rt-\frac{r}{K}\int _{{-\tau}}^{{t-\tau}}N_{0}(s)ds\right)\quad\text{dla}\quad t\in[0,\tau].](wyklady/mbm/mi/mi397.png) |
Oznaczmy otrzymane rozwiązanie przez ![]() dla
dla ![]() . Zauważmy, że jest ono dobrze określone dla ciągłej funkcji początkowej, co więcej w tym przypadku wystarczy, żeby funkcja
. Zauważmy, że jest ono dobrze określone dla ciągłej funkcji początkowej, co więcej w tym przypadku wystarczy, żeby funkcja ![]() była całkowalna. Mamy też jednoznaczność, a nieujemność wynika z nierówności
była całkowalna. Mamy też jednoznaczność, a nieujemność wynika z nierówności ![]() , przy czym
, przy czym ![]() implikuje
implikuje ![]() (stany stacjonarne równań z opóźnieniem są oczywiście takie same jak dla analogicznego równania bez opóźnienia, skoro nie zależą one od czasu). Teraz zastosujemy metodę indukcji matematycznej. Załóżmy, że znamy rozwiązanie
(stany stacjonarne równań z opóźnieniem są oczywiście takie same jak dla analogicznego równania bez opóźnienia, skoro nie zależą one od czasu). Teraz zastosujemy metodę indukcji matematycznej. Załóżmy, że znamy rozwiązanie ![]() na przedziale
na przedziale ![]() i znajdźmy rozwiązanie na kolejnym przedziale
i znajdźmy rozwiązanie na kolejnym przedziale
![N_{{k+1}}(t)=N_{k}(k\tau)\text{exp}\left(r(t-k\tau)-\frac{r}{K}\int _{{(k-1)\tau}}^{{t-\tau}}N_{k}(s)ds\right)\quad\text{dla}\quad t\in[k\tau,(k+1)\tau].](wyklady/mbm/mi/mi407.png) |
Wobec tego metoda indukcji matematycznej gwarantuje, że rozwiązanie istnieje dla dowolnego ![]() i ma pożądane własności.
i ma pożądane własności.
Zbadamy teraz własności asymptotyczne rozwiązań, w szczególności stabilność lokalną rozwiązań stacjonarnych. Metoda badania stabilności jest analogiczna, jak stosowana w przypadku równań bez opóźnienia. Przeprowadzamy najpierw linearyzację wokół stanu stacjonarnego. Niech ![]() będzie rozwiązaniem stacjonarnym, czyli
będzie rozwiązaniem stacjonarnym, czyli ![]() albo
albo ![]() . Wprowadzamy nową zmienną
. Wprowadzamy nową zmienną ![]() , która oznacza odchylenie od stanu stacjonarnego,
, która oznacza odchylenie od stanu stacjonarnego, ![]() , przy czym zakładamy, że
, przy czym zakładamy, że ![]() i pomijamy wyrazy rzędu
i pomijamy wyrazy rzędu ![]() . Mamy
. Mamy
po pominięciu składnika ![]() i zauważeniu, że
i zauważeniu, że ![]() dla obu stanów stacjonarnych.
dla obu stanów stacjonarnych.
Dla stanu stacjonarnego ![]() równanie zlinearyzowane ma postać
równanie zlinearyzowane ma postać
Widzimy więc, że odchylenie od stanu stacjonarnego ![]() rośnie, zatem
rośnie, zatem ![]() jest niestabilne.
jest niestabilne.
Z kolei dla dodatniego stanu stacjonarnego
Jak zbadać stabilność stanu stacjonarnego ![]() powyższego równania? Tak jak w przypadku równań bez opóźnienia szukamy rozwiązań w postaci wykładniczej
powyższego równania? Tak jak w przypadku równań bez opóźnienia szukamy rozwiązań w postaci wykładniczej ![]() . Jeśli wszystkie wartości własne
. Jeśli wszystkie wartości własne ![]() mają części rzeczywiste ujemne, to
mają części rzeczywiste ujemne, to ![]() przy
przy ![]() dla dostatecznie małych
dla dostatecznie małych ![]() . Stąd odchylenie maleje do
. Stąd odchylenie maleje do ![]() , zatem stan
, zatem stan ![]() równania (5.1) jest lokalnie asymptotycznie stabilny. Jeśli natomiast istnieje wartość własna o części rzeczywistej dodatniej, to
równania (5.1) jest lokalnie asymptotycznie stabilny. Jeśli natomiast istnieje wartość własna o części rzeczywistej dodatniej, to ![]() jest niestabilny. Okazuje się, że dla równań z opóźnieniem równanie charakterystyczne, w tym przypadku
jest niestabilny. Okazuje się, że dla równań z opóźnieniem równanie charakterystyczne, w tym przypadku
ma nieskończenie wiele rozwiązań, które zależą w sposób ciągły od parametrów, w szczególności od opóźnienia. Skoro dla ![]() mamy
mamy ![]() , to dla małych opóźnień stan
, to dla małych opóźnień stan ![]() pozostaje stabilny. Zastanówmy się kiedy może nastąpić destabilizacja. Skoro niestabilność wiąże się z pojawieniem się wartości własnej o dodatniej części rzeczywistej, to dla pewnej krytycznej wartości
pozostaje stabilny. Zastanówmy się kiedy może nastąpić destabilizacja. Skoro niestabilność wiąże się z pojawieniem się wartości własnej o dodatniej części rzeczywistej, to dla pewnej krytycznej wartości ![]() musimy mieć
musimy mieć ![]() ,
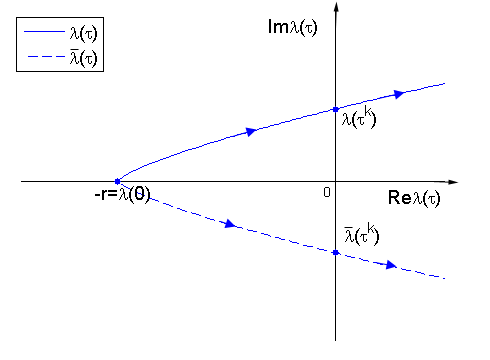
, ![]() , i wartości własne przechodzą z lewej półpłaszczyzny zespolonej na prawą, więc
, i wartości własne przechodzą z lewej półpłaszczyzny zespolonej na prawą, więc ![]() , gdzie
, gdzie ![]() oznacza część rzeczywistą wartości własnej, por. rys. 5.1.
oznacza część rzeczywistą wartości własnej, por. rys. 5.1.
Jeśli ![]() , to
, to
ale ![]() , więc
, więc ![]() (w ogólnym przypadku łatwiej rozpatrywać tę równość po podniesieniu do kwadratu). Znając krytyczną wartość własną obliczamy
(w ogólnym przypadku łatwiej rozpatrywać tę równość po podniesieniu do kwadratu). Znając krytyczną wartość własną obliczamy ![]()
 |
czyli ![]() i
i ![]() , wobec tego
, wobec tego ![]() ,
, ![]() . Mamy więc ciąg krytycznych wartości własnych
. Mamy więc ciąg krytycznych wartości własnych ![]() . Okazuje się, że znak
. Okazuje się, że znak ![]() możemy sprawdzić korzystając z już przeprowadzonych obliczeń.
W ogólnym przypadku dla układu równań z pojedynczym opóźnieniem
możemy sprawdzić korzystając z już przeprowadzonych obliczeń.
W ogólnym przypadku dla układu równań z pojedynczym opóźnieniem ![]() równanie charakterystyczne ma postać
równanie charakterystyczne ma postać
i dla czysto urojonych wartości własnych ![]() ,
, ![]() ,
definiujemy funkcję pomocniczą
,
definiujemy funkcję pomocniczą
której miejsca zerowe wyznaczają czysto urojone wartości własne. U nas ![]() . Podstawiamy
. Podstawiamy ![]() i rozpatrujemy
i rozpatrujemy ![]() . Pochodna tej funkcji w punkcie
. Pochodna tej funkcji w punkcie
![]() ma taki sam znak jak
ma taki sam znak jak ![]() . W naszym przypadku
. W naszym przypadku ![]() , zatem zawsze wartości własne przechodzą z lewej półpłaszczyzny na prawą. Wobec tego dla pierwszej wartości krytycznej
, zatem zawsze wartości własne przechodzą z lewej półpłaszczyzny na prawą. Wobec tego dla pierwszej wartości krytycznej ![]() następuje destabilizacja i rozwiązanie
następuje destabilizacja i rozwiązanie ![]() pozostaje niestabilne dla wszystkich
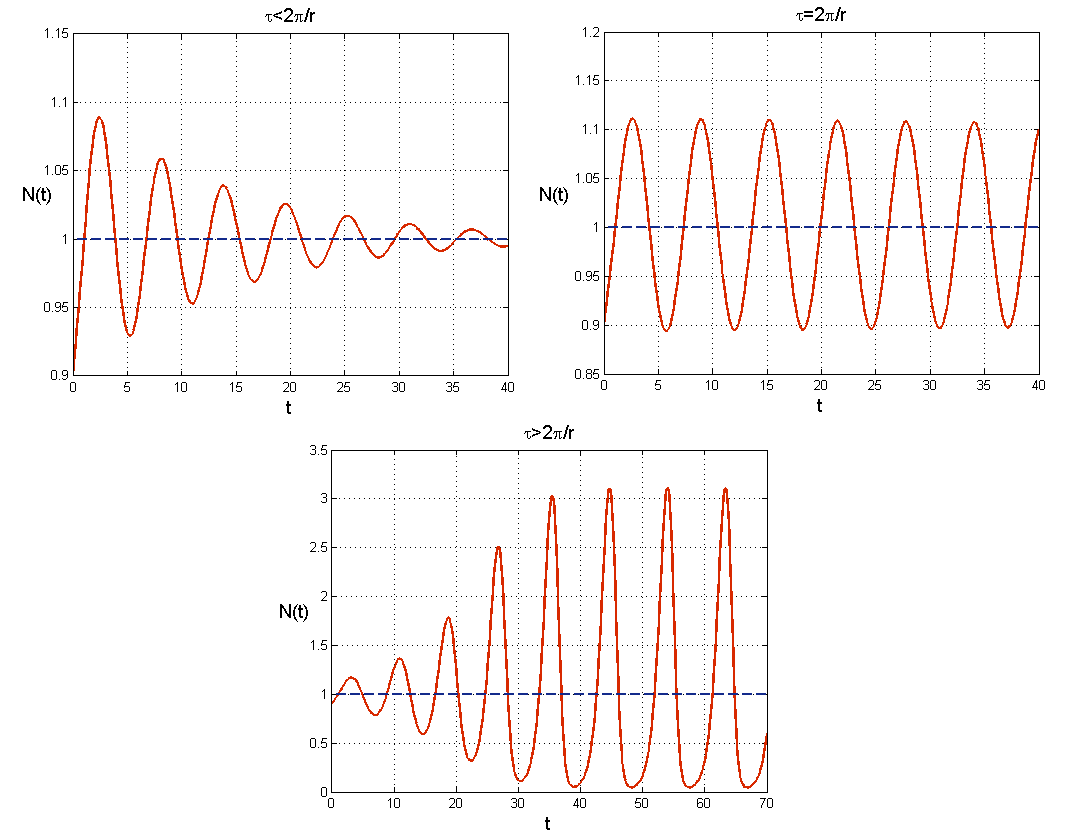
pozostaje niestabilne dla wszystkich ![]() . Ten mechanizm destabilizacji nazywamy bifurkacją Hopfa. W jej wyniku pojawiają się nietrywialne rozwiązania okresowe o okresie
. Ten mechanizm destabilizacji nazywamy bifurkacją Hopfa. W jej wyniku pojawiają się nietrywialne rozwiązania okresowe o okresie ![]() , co widzimy na wykresach na rys. 5.2.
, co widzimy na wykresach na rys. 5.2.
Podsumowując tę tematykę należy stwierdzić, że wprowadzenie do opisu heurystycznego zależności od wieku prowadzi najczęściej do dynamiki oscylacyjnej, która jest zwykle obserwowana w przypadku populacji występujących w naturze. Widzimy też, że opis dynamiki za pomocą równań z opóźnieniem może przypominać zachowanie rozwiązań modeli dyskretnych, gdzie też obserwujemy oscylacje. Co więcej, jeśli prawa strona równania z opóźnieniem reprezentuje np. funkcję Hilla, to dla odpowiednio dużych wartości współczynnika Hilla występują zachowania chaotyczne, znów analogicznie jak w modelach dyskretnych.
Możemy przypuszczać, że podobieństwa te wiążą się z podobną strukturą obu typów modeli — w modelach dyskretnych tak jak w równaniach z opóźnieniem dynamika w chwili bieżącej ![]() zależy od stanu układu z chwili poprzedniej
zależy od stanu układu z chwili poprzedniej ![]() .
.


