9. Równanie logistyczne z opóźnieniem
Klasyczne modele oparte na równaniach
różniczkowych zwyczajnych zakładają, że w danej chwili reakcja systemu (zmiana wartości) jest natychmiastowa i zależy od jej wartości w tym momencie (czyli, że ![]() . Jednak bywają sytuacje, kiedy takie założenie jest nierealistyczne i należy uwzględnić fakt, iż — wskutek swego rodzaju
bezwładności układu — wartość pochodnej rozwiązania może zależeć nie tylko od jego bieżącej kondycji, lecz również od wartości z chwil wcześniejszych. W pierwszym przybliżeniu taka koncepcja prowadzi to do tzw. równań różniczkowych ze stałym opóźnieniem
. Jednak bywają sytuacje, kiedy takie założenie jest nierealistyczne i należy uwzględnić fakt, iż — wskutek swego rodzaju
bezwładności układu — wartość pochodnej rozwiązania może zależeć nie tylko od jego bieżącej kondycji, lecz również od wartości z chwil wcześniejszych. W pierwszym przybliżeniu taka koncepcja prowadzi to do tzw. równań różniczkowych ze stałym opóźnieniem ![]() :
:
Pakiet OdePkg, rozszerzający możliwości Octave i dostępny w Octave-Forge [20], zawiera w sobie kilka solverów równań różniczkowych ze stałym opóźnieniem ![]() . Drobną ich wadą jest to, że dopuszczają jedynie stały warunek początkowy (w równaniach z opóźnieniem warunek początkowy musi być zadany nie w jednym punkcie, ale na odcinku,
. Drobną ich wadą jest to, że dopuszczają jedynie stały warunek początkowy (w równaniach z opóźnieniem warunek początkowy musi być zadany nie w jednym punkcie, ale na odcinku, ![]() . Wszystkie solvery wykorzystują tzw. włożone jawne metody Rungego–Kutty, od metody niskiego rzędu
. Wszystkie solvery wykorzystują tzw. włożone jawne metody Rungego–Kutty, od metody niskiego rzędu ode23d, po metodę wysokiego rzędu ode78d. Warto pamiętać, że w przypadku równań z opóźnieniem rozwiązania mogą nie być zbyt gładkie i wówczas korzystniej może być stosować schemat niższego rzędu.
Sposób wykorzystania pakietu jest bardzo dokładnie opisany w [25], na którym, jak się wydaje, opiera się zestaw solverów z OdePkg. My ograniczymy się do krótkiego omówienia sposobu rozwiązania jednego z najprostszych równań.
9.1. Sformułowanie zadania i implementacja
Rozważmy równanie postaci
| (9.1) | ||||
| (9.2) |
Jest to tzw.równanie logistyczne z opóźnieniem. Dodatni współczynnik ![]() jest bardzo istotnym parametrem. Okazuje się bowiem, że gdy
jest bardzo istotnym parametrem. Okazuje się bowiem, że gdy
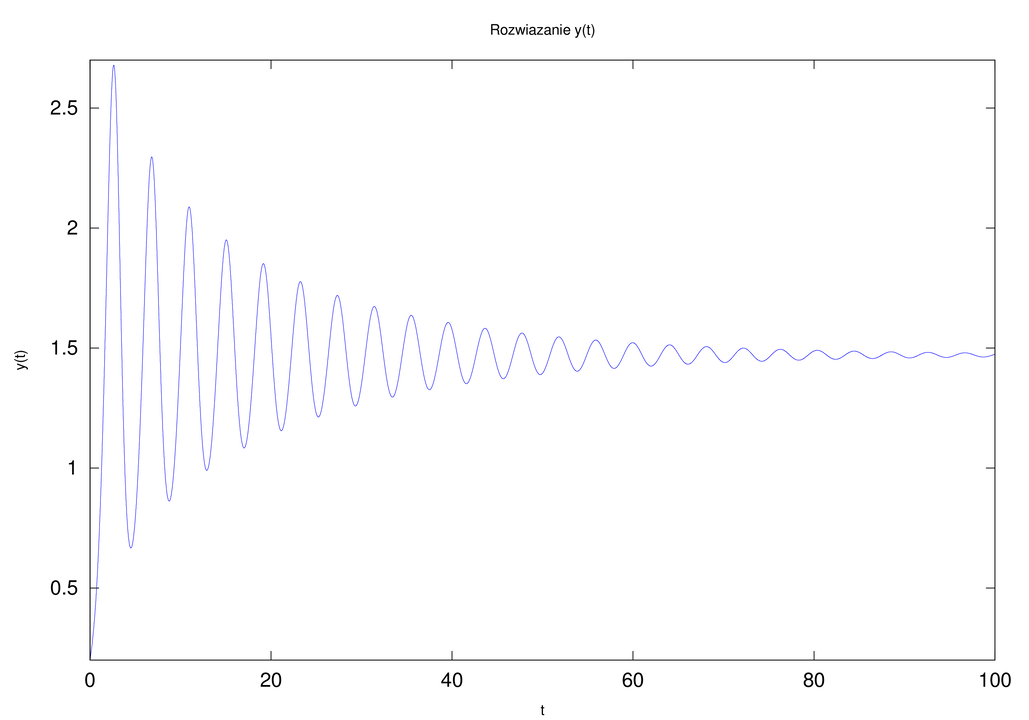
![]() , to — dla dostatecznie długich czasów — rozwiązania (9.1) stabilizują się na poziomie
, to — dla dostatecznie długich czasów — rozwiązania (9.1) stabilizują się na poziomie ![]() , natomiast dla
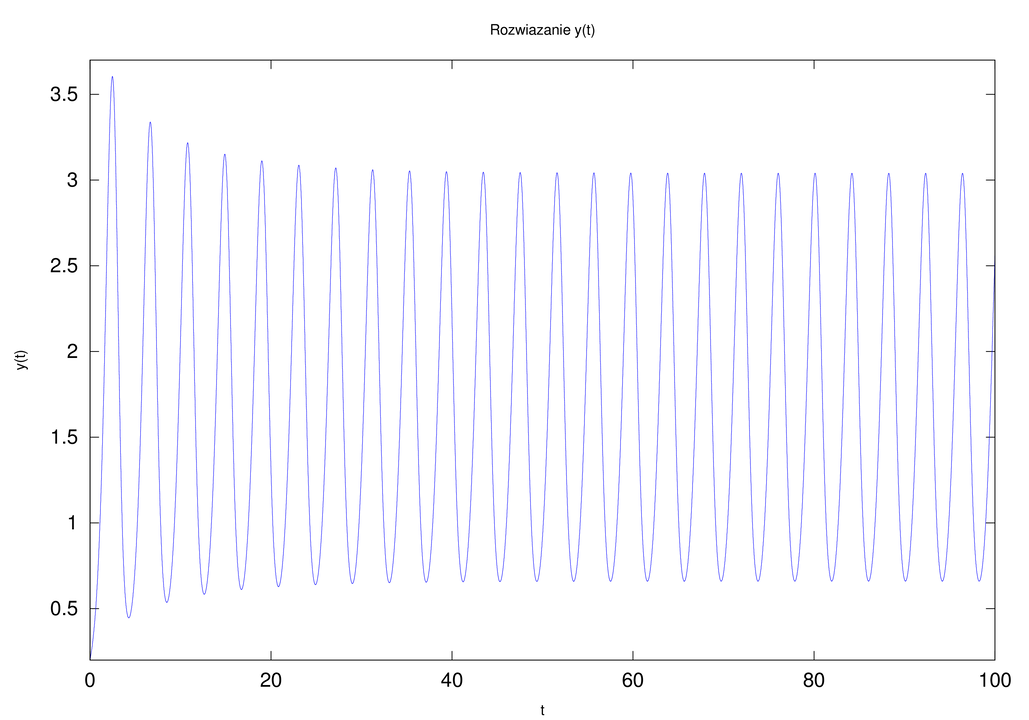
, natomiast dla ![]() rozwiązania wpadają w niegasnące, regularne oscylacje. Więcej na temat logistycznego równania z opóźnieniem można dowiedzieć się z wykładu Modelowanie matematyczne w biologii i medycynie.
rozwiązania wpadają w niegasnące, regularne oscylacje. Więcej na temat logistycznego równania z opóźnieniem można dowiedzieć się z wykładu Modelowanie matematyczne w biologii i medycynie.
Zacznijmy od zapisania skryptu, rozwiązującego nasze równanie dla wartości
parametru ![]() równych
równych ![]() , na przedziale czasowym długości
, na przedziale czasowym długości ![]() (dostatecznie długim, byśmy zaobserwowali prawdopodobną tendencję rozwiązania).
(dostatecznie długim, byśmy zaobserwowali prawdopodobną tendencję rozwiązania).
global a;
lag = 1;
T = 100;
% parametry solvera
opts = odeset ('Stats', 'on', ...
'RelTol', 1e-4, ... % tolerancja bledu wzglednego
'AbsTol', 1e-4, ... % tolerancja bledu bezwzglednego
'InitialStep', 1e-5, ... % poczatkowy krok schematu
'MaxStep', 1e-2); % przy okazji steruje liczba punktow probkowania rozwiazania
filename = 'logdel';
for a = [0.1, pi/2 - 0.1, pi/2 + 0.1]
sol = ode23d(@logdelf, [0,T], 0.2, lag, 0.2, opts);
t = sol.x; Y = sol.y; sol.stats
Ylag = interp1(t,Y,t-lag,'cubic'); % rozwiazanie opoznione
Ydot = logdelf(t,Y,Ylag); % pochodna rozwiazania
plot(t,Y);
xlabel('t'); ylabel('y(t)'); title('Rozwiazanie y(t)');
print('-depsc', strcat(filename, '-a-', ...
strrep(num2str(a,'%g'),'.','p'), '.eps') )
pause(1);
plot(Y,Ydot);
xlabel('y(t)'); ylabel('y''(t)'); title('Wykres fazowy');
print('-depsc', strcat(filename, '-a-', ...
strrep(num2str(a,'%g'),'.','p'), '-phase.eps') )
pause(1);
end
Kluczowa jest linijka
sol = ode23d(@logdelf, [0,T], 0.2, lag, 0.2, opts);
która w rzeczywistości rozwiązuje nasze równanie. Parametrami funkcji
ode23d są kolejno:
-
funkcja określająca prawą stronę23Funkcja musi być przekazana jako wskaźnik, a nie jako nazwa! (u nas jest to
logdelf), do której parametraprzekazujemy z przyzwyczajenia za pomocą zmiennej globalnej24W rzeczywistości funkcje z pakietu OdePkg umożliwiają wygodne przekazywanie listy dodatkowych parametrów do wnętrza funkcji prawej strony.), -
przedział czasowy, na którym wyznaczamy rozwiązanie, tutaj:
![[0,T]](wyklady/ona/mi/mi568.png) ,
, -
warunek początkowy,
-
wartości opóźnień (u nas jest tylko jedno, bo równanie jest skalarne)
lag= 1), no i ewentualnie -
struktura, zmieniająca domyślne parametry pracy solvera.
function ydot = logdelf(t,y,ylag) global a; ydot = (a - ylag).*y; end
W odróżnieniu od lsode, ode23d zwraca wartości rozwiązania w
przez siebie wyznaczonych punktach przedziału ![]() . Aby więc określić jego
wartość w zadanych przez nas punktach,
. Aby więc określić jego
wartość w zadanych przez nas punktach,
t = linspace(0,T,10*T);musimy interpolować wartości; warto także wcześniej zadać w opcjach maksymalną długość kroku, która zagwarantuje nam wystarczającą rozdzielczość próbkowania; dla danych opóźnionych, a następnie wyznacz
Ylag = interp1(t,Y,t-lag,'cubic'); % rozwiązanie opóźnione Ydot = logdelf(t,Y,Ylag); % pochodna rozwiązania
która zwraca nam wartości obliczonego przybliżenia rozwiązania (i jego
pochodnej!) w punktach ![]() . Potem wystarczy je tylko narysować, komendami
. Potem wystarczy je tylko narysować, komendami
plot(t, Y); plot(Y, Ydot);
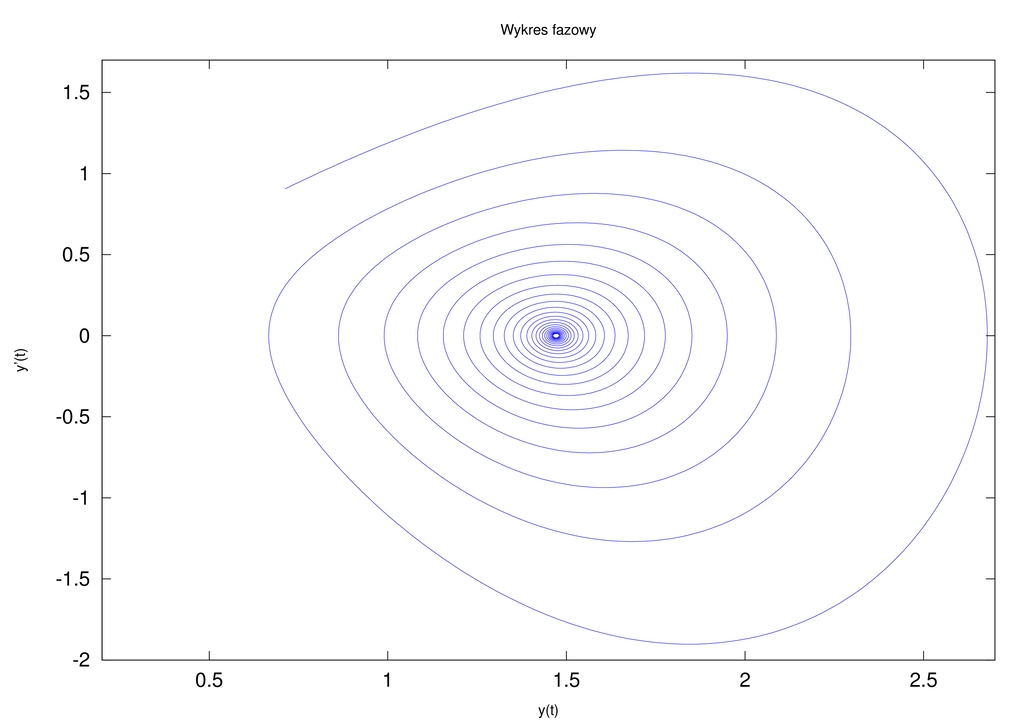
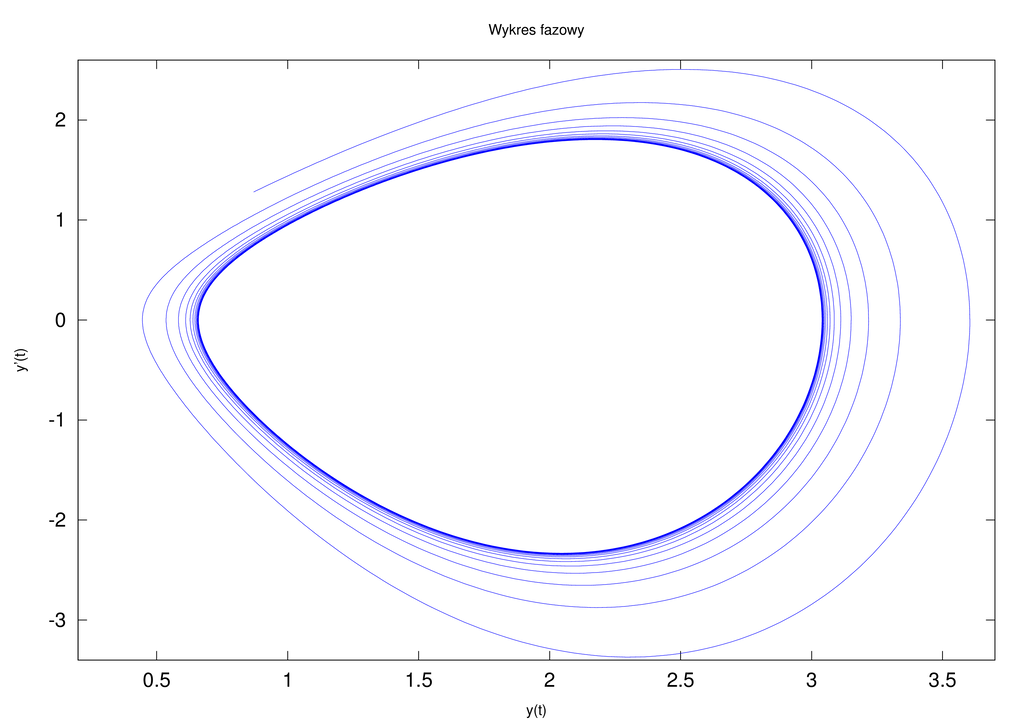
— najpierw rozwiązanie w zależności od czasu, potem — wykres fazowy.
Wyniki, które, przynajmniej w sposób jakościowy, zgadzają się z przewidywaniami teoretycznymi, przedstawiają poniższe wykresy.
9.2. Weryfikacja wyników
Aby nabrać więcej przekonania do ilościowych wyników, zobaczymy, czy stukrotne zmniejszenie parametrów tolerancji błędu spowoduje wyraźną zmianę uzyskanych wartości rozwiązania. Sprawdzenie przeprowadzimy dla parametru ![]() .
.
Najpierw wyznaczymy w standardowy sposób wartości rozwiązania w interesujących nas punktach:
a = pi/2 + 0.1;
opts = odeset ('Stats', 'on', ...
'RelTol', 1e-4, ... % tolerancja błędu względnego
'AbsTol', 1e-4, ... % tolerancja błędu bezwzględnego
'InitialStep', 1e-5, ... % początkowy krok schematu
'MaxStep', 1e-2); % przy okazji steruje liczbą punktów próbkowania
sol = ode23d(@logdelf, [0,T], 0.2, lag, 0.2, opts);
t = sol.x; Y = sol.y; sol.stats
a następnie powtórzymy obliczenia dla ostrzejszych kryteriów:
opts = odeset ('Stats', 'on', ...
'RelTol', 1e-6, ... % tolerancja błędu względnego
'AbsTol', 1e-6, ... % tolerancja błędu bezwzględnego
'InitialStep', 1e-7, ... % początkowy krok schematu
'MaxStep', 1e-2); % przy okazji steruje liczbą punktów próbkowania
sol = ode23d(@logdelf, [0,T], 0.2, lag, 0.2, opts);
tref = sol.x; Yref = sol.y; sol.stats
Jednak kłopot w tym, że — w przeciwieństwie do lsode
— funkcja ode23d zwraca rozwiązanie nie we wskazanych przez nas wartościach sol.x.
Dlatego musimy napierw sprowadzić wyznaczone wartości do wspólnego zestawu chwil czasowych ![]() . Wydaje się rozsądne, by za ten bazowy zestaw wziąć po prostu
. Wydaje się rozsądne, by za ten bazowy zestaw wziąć po prostu t — wartości wyznaczone przy mniej restrykcyjnych parametrach pracy solvera. Następnie, musimy interpolować25To może wprowadzić dodatkowe zaburzenia w wynikach, więc musimy być czujni! wartości (tref,Yref) na t, do czego idealnie nadaje się funkcja interp1.
Yreft = interp1(tref, Yref, t);
Następnie sprawdzamy, jak bardzo różnią się rozwiązania Y i Yref:
octave:> norm(Yreft-Y, Inf) ans = 4.8362e-06 octave:> semilogy(abs(Yreft-Y));
A więc maksymalna różnica pomiędzy rozwiązaniami wynosi jedynie około ![]() , co jest raczej uspokajającą wiadomością (choć należałoby jeszcze wykluczyć na przykład zjawisko aliasingu, które mocno dało się nam we znaki, gdy rozwiązywaliśmy zadanie o transformatorze, z rozdziału 6).
, co jest raczej uspokajającą wiadomością (choć należałoby jeszcze wykluczyć na przykład zjawisko aliasingu, które mocno dało się nam we znaki, gdy rozwiązywaliśmy zadanie o transformatorze, z rozdziału 6).
Ćwiczenie 9.1
Potwierdź eksperymentalnie, że właśnie dla ![]() następuje zmiana długoterminowego charakteru rozwiązań, z gasnących do zera, na oscylacyjne.
następuje zmiana długoterminowego charakteru rozwiązań, z gasnących do zera, na oscylacyjne.
Ćwiczenie 9.2
Napisz funkcję, pozwalającą rozwiązać równanie logistyczne z opóźnieniem o zadanych parametrach i jednocześnie od razu zweryfikować w opisany powyżej sposób jakość rozwiązania. Zadbaj o komunikaty i wizualizacje dla niecierpliwego użytkownika. Następnie sprawdź pozostałe uzyskane powyżej wyniki.
Ćwiczenie 9.3
Napisz skrypt Octave lub MATLABa, rozwiązujący inną wersję równania logistycznego z opóźnieniem, pochodzącą z pewnego modelu wzrostu nowotworu u myszy [4]:
Dodatnie współczynniki ![]() i
i ![]() są parametrami modelu. Zweryfikuj jakość uzyskanych aproksymacji rozwiązania i jego pochodnej w przypadku, gdy
są parametrami modelu. Zweryfikuj jakość uzyskanych aproksymacji rozwiązania i jego pochodnej w przypadku, gdy ![]() ,
, ![]() , a opóźnienie wynosi
, a opóźnienie wynosi ![]() . Jako funkcję początkową przyjmij stałą równą
. Jako funkcję początkową przyjmij stałą równą ![]() .
.


