8. Warunek konieczny dla ograniczeń mieszanych
W tym rozdziale wyprowadzimy warunek konieczny pierwszego rzędu dla problemu optymalizacyjnego w następującej formie:
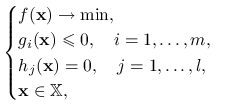 |
(8.1) |
gdzie ![]() jest zbiorem otwartym i
jest zbiorem otwartym i ![]() . Zbiór punktów dopuszczalnych zadany jest następująco:
. Zbiór punktów dopuszczalnych zadany jest następująco:
| (8.2) |
Przypomnijmy, że funkcje ![]() nazywane są ograniczeniami nierównościowymi, funkcje
nazywane są ograniczeniami nierównościowymi, funkcje ![]() są ograniczeniami równościowymi, zaś cały problem (8.1) nazywa się zadaniem optymalizacyjnym z ograniczeniami mieszanymi.
są ograniczeniami równościowymi, zaś cały problem (8.1) nazywa się zadaniem optymalizacyjnym z ograniczeniami mieszanymi.
Przykład 8.1
Rozważmy następujący problem optymalizacyjny:
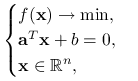 |
dla pewnego ![]() i
i ![]() . Ograniczenie równościowe możemy zamienić na dwa ograniczenia nierównościowe:
. Ograniczenie równościowe możemy zamienić na dwa ograniczenia nierównościowe:
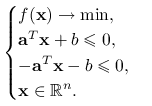 |
Ograniczenia są afiniczne, czyli w każdym punkcie spełniony jest warunek afiniczności. Jeśli ![]() jest rozwiązaniem lokalnym, to istnieje wektor mnożników Lagrange'a
jest rozwiązaniem lokalnym, to istnieje wektor mnożników Lagrange'a ![]() i spełnione są warunki Kuhna-Tuckera (5.5):
i spełnione są warunki Kuhna-Tuckera (5.5):
 |
Punkt ![]() jest dopuszczalny (jako że jest rozwiązaniem), czyli spełnia ograniczenia:
jest dopuszczalny (jako że jest rozwiązaniem), czyli spełnia ograniczenia: ![]() . Stąd trywialnie spełnione są druga i trzecia równość. Możemy zatem powyższe warunki równoważnie zapisać jako:
. Stąd trywialnie spełnione są druga i trzecia równość. Możemy zatem powyższe warunki równoważnie zapisać jako:
 |
Oznaczmy ![]() . Warunki nieujemności
. Warunki nieujemności ![]() implikują, że
implikują, że ![]() . Dostajemy więc finalnie:
. Dostajemy więc finalnie:
Jest to warunek Kuhna-Tuckera dla ograniczeń równościowych.
Powyższy przykład sugerowałby, że teoria dla problemów z ograniczeniami nierównościowymi, zbudowana w poprzednich rozdziałach, pozwala poradzić sobie z ograniczeniami równościowymi. Niestety nie jest to prawda. Ograniczenia afiniczne są szczególnym przypadkiem. Jeśli któreś z ograniczeń równościowych nie jest afiniczne i rozbijemy je na dwie nierówności, jak powyżej, to w żadnym punkcie zbioru ![]() nie jest spełniony ani warunek liniowej zależności ograniczeń ani warunek Slatera.
nie jest spełniony ani warunek liniowej zależności ograniczeń ani warunek Slatera.
8.1. Warunek konieczny pierwszego rzędu
Teoria wprowadzana w tym podrozdziale jest prostym rozszerzeniem tego, co już zrobiliśmy dla problemu optymalizacyjnego z ograniczeniami nierównościowymi. Rozpoczniemy od rozszerzenia ![]() :
:
Definicja 8.1
Niech ![]() ,
, ![]() różniczkowalne w
różniczkowalne w ![]() dla ograniczeń aktywnych
dla ograniczeń aktywnych ![]() oraz
oraz ![]() są różniczkowalne w
są różniczkowalne w ![]() dla
dla ![]() . Stożkiem kierunków stycznych dla ograniczeń zlinearyzowanych nazywamy zbiór
. Stożkiem kierunków stycznych dla ograniczeń zlinearyzowanych nazywamy zbiór
Podobnie jak poprzednio zauważmy, że stożek kierunków stycznych dla ograniczeń zlinearyzowanych jest zbiorem wielościennym, a zatem wypukłym i domkniętym. Jeśli jest choć jedno ograniczenie równościowe, to ma on puste wnętrze.
Warunek konieczny istnienia rozwiązania lokalnego problemu z ograniczeniami mieszanymi jest sformułowany poniżej. Identycznie jak w twierdzeniu 5.2 zakładamy równość stożka kierunków stycznych dla ograniczeń oryginalnych i zlinearyzowanych. Później uogólnimy warunki regularności, które będą taką równość pociągały.
Twierdzenie 8.1 (Twierdzenia Kuhna-Tuckera)
Niech ![]() będzie rozwiązaniem lokalnym (8.1). Jeśli funkcje
będzie rozwiązaniem lokalnym (8.1). Jeśli funkcje ![]() ,
, ![]() ,
, ![]() , oraz
, oraz ![]() ,
, ![]() , są różniczkowalne w
, są różniczkowalne w ![]() oraz
oraz ![]() , to istnieją
, to istnieją ![]() oraz
oraz ![]() takie że
takie że
 |
(8.3) |
Dowód
Na mocy twierdzenia 5.1 mamy ![]() . Dalej, korzystając z założenia, dostajemy
. Dalej, korzystając z założenia, dostajemy ![]() , co innymi słowy oznacza, że nie istnieje rozwiązanie
, co innymi słowy oznacza, że nie istnieje rozwiązanie ![]() układu
układu
 |
(8.4) |
Stosujemy lemat Farkasa, lemat 5.3, z ![]() i macierzą
i macierzą ![]() następującej postaci:
następującej postaci:
 |
Istnieje zatem ![]() takie że
takie że ![]() lub inaczej
lub inaczej
| (8.5) |
Zdefiniujmy ![]() ,
, ![]() . Przypiszmy współrzędnym
. Przypiszmy współrzędnym ![]() odpowiadającym ograniczeniom aktywnym,
odpowiadającym ograniczeniom aktywnym, ![]() , ostatnie
, ostatnie ![]() wartości wektora
wartości wektora ![]() . Na pozostałych współrzędnych połóżmy zera. Wówczas równość (8.5) jest równoważna następującej
. Na pozostałych współrzędnych połóżmy zera. Wówczas równość (8.5) jest równoważna następującej
 |
Z definicji ![]() oczywiste jest, że
oczywiste jest, że ![]() .
.
8.2. Warunki regularności
Sformułujemy teraz trzy warunki dostateczne równości ![]() , zwane warunkami regularności.
, zwane warunkami regularności.
Definicja 8.2
W punkcie ![]() spełniony jest:
spełniony jest:
warunek liniowej niezależności, jeśli funkcje
 ,
,  , są ciągłe w
, są ciągłe w  , pozostałe ograniczenia nierównościowe i wszystkie równościowe są klasy
, pozostałe ograniczenia nierównościowe i wszystkie równościowe są klasy  na otoczeniu oraz wektory
na otoczeniu oraz wektory  dla
dla  i
i  dla
dla  są liniowo niezależne,
są liniowo niezależne,warunek afiniczności, jeśli funkcje
, , oraz  , , są afiniczne,
, , są afiniczne,warunek Slatera, jeśli
funkcje
, są pseudowypukłe w , funkcje , , są ciągłe w ,funkcje
, , są afiniczne,
istnieje
 , dla którego
, dla którego  dla oraz
dla oraz  dla .
dla .
Zaczniemy od najprostszego przypadku.
Twierdzenie 8.2
Jeśli w punkcie ![]() spełniony jest warunek afiniczności, to zachodzi równość
spełniony jest warunek afiniczności, to zachodzi równość ![]() .
.
Dowód
Postępując jak w przykładzie 8.1 zamieniamy ograniczenia afiniczne równościowe na ograniczenia afiniczne nierównościowe. Teza wynika z twierdzenia 6.1.
∎Twierdzenie 8.3
Jeśli w punkcie ![]() spełniony jest warunek Slatera, to zachodzi równość
spełniony jest warunek Slatera, to zachodzi równość ![]() .
.
Dowód
Zapiszmy najpierw funkcje ![]() dla
dla ![]() :
:
Wprowadźmy uogólnienie zbioru ![]() do przypadku ograniczeń mieszanych:
do przypadku ograniczeń mieszanych:
(1) ![]() Weźmy punkt
Weźmy punkt ![]() z warunku Slatera. Na mocy pseudowypukłości, patrz uwaga 4.3, mamy
z warunku Slatera. Na mocy pseudowypukłości, patrz uwaga 4.3, mamy
Dla każdego ![]() mamy także
mamy także
Wnioskujemy więc, że wektor ![]() .
.
(2) ![]() . W tym celu weźmy dowolny
. W tym celu weźmy dowolny ![]() . Wystarczy pokazać, że pewien odcinek o końcu
. Wystarczy pokazać, że pewien odcinek o końcu ![]() i kierunku
i kierunku ![]() zawiera się w całości w zbiorze
zawiera się w całości w zbiorze ![]() . Rozważmy w tym celu funkcję
. Rozważmy w tym celu funkcję ![]() Na mocy ciągłości funkcji opisujących ograniczenia nieaktywne istnieje
Na mocy ciągłości funkcji opisujących ograniczenia nieaktywne istnieje ![]() taki że
taki że ![]() dla
dla ![]() oraz
oraz ![]() . Z faktu, że
. Z faktu, że ![]() dostajemy również, że
dostajemy również, że ![]() dla
dla ![]() i dowolnego
i dowolnego ![]() . Pozostaje tylko zająć się ograniczeniami aktywnymi. Z faktu, że
. Pozostaje tylko zająć się ograniczeniami aktywnymi. Z faktu, że ![]() są różniczkowalne w
są różniczkowalne w ![]() dla
dla ![]() mamy
mamy
 |
gdzie ostatnia nierówność wynika z tego, że ![]() . A zatem
. A zatem ![]() dla dostatecznie małych
dla dostatecznie małych ![]() .
.
(3) ![]() . Zbiory
. Zbiory ![]() i
i ![]() leżą na hiperpłaszczyźnie
leżą na hiperpłaszczyźnie ![]() wyznaczonej przez afiniczne ograniczenia liniowe. Możemy zatem znaleźć przekształcenie liniowe
wyznaczonej przez afiniczne ograniczenia liniowe. Możemy zatem znaleźć przekształcenie liniowe ![]() o pełnym rzędzie przekształcające tą hiperpłaszczyznę w przestrzeń
o pełnym rzędzie przekształcające tą hiperpłaszczyznę w przestrzeń ![]() , gdzie
, gdzie ![]() jest wymiarem rzeczonej hiperpłaszczyzny (jeśli funkcje
jest wymiarem rzeczonej hiperpłaszczyzny (jeśli funkcje ![]() są parami różne, to
są parami różne, to ![]() ). Przekształcenie to jest wzajemnie jednoznaczne rozpatrywane jako funkcja określona na
). Przekształcenie to jest wzajemnie jednoznaczne rozpatrywane jako funkcja określona na ![]() . A zatem topologie w
. A zatem topologie w ![]() i na
i na ![]() są identyczne. Wystarczy więc udowodnić tezę tego podpunktu na obrazach
są identyczne. Wystarczy więc udowodnić tezę tego podpunktu na obrazach ![]() i
i ![]() zbiorów
zbiorów ![]() i
i ![]() . Zauważmy, że zbiór
. Zauważmy, że zbiór ![]() jest otwarty. Wykazaliśmy, że jest niepusty. Jest również wnętrzem zbioru
jest otwarty. Wykazaliśmy, że jest niepusty. Jest również wnętrzem zbioru ![]() . Na mocy lematu 6.1 mamy
. Na mocy lematu 6.1 mamy ![]() .
.
(4) ![]() . Identycznie jak dowód lematu 5.2.
. Identycznie jak dowód lematu 5.2.
Pozostaje już tylko przypomnieć, że ![]() jest zbiorem domkniętym. A zatem
jest zbiorem domkniętym. A zatem
Zanim przejdziemy do rozważań nad trzecim warunkiem regularności, warunkiem liniowej niezależności, przypomnijmy twierdzenie o funkcji uwikłanej, by, korzystając z niego, podać opis stożka kierunków stycznych do powierzchni zadanej przez ograniczenia równościowe.
Twierdzenie 8.4 (Twierdzenie o funkcji uwikłanej)
Niech ![]() , gdzie
, gdzie ![]() otwarty, będzie odwzorowaniem klasy
otwarty, będzie odwzorowaniem klasy ![]() . Załóżmy, że
. Załóżmy, że ![]() , gdzie
, gdzie ![]() . Przyjmujemy tutaj notację, że
. Przyjmujemy tutaj notację, że ![]() , zaś
, zaś ![]() . Oznaczmy przez
. Oznaczmy przez ![]() macierz pochodnych cząstkowych, w punkcie
macierz pochodnych cząstkowych, w punkcie ![]() , względem pierwszych
, względem pierwszych ![]() zmiennych:
zmiennych: ![]() zadana jest wzorem
zadana jest wzorem ![]()
Jeśli macierz ![]() jest odwracalna, to istnieje zbiór otwarty
jest odwracalna, to istnieje zbiór otwarty ![]() zawierający
zawierający ![]() oraz funkcja
oraz funkcja ![]() klasy
klasy ![]() , taka że
, taka że ![]() dla
dla ![]() ,
, ![]() oraz
oraz ![]() dla
dla ![]() . Ponadto,
. Ponadto, ![]() , gdzie
, gdzie ![]() jest pochodną
jest pochodną ![]() w punkcie
w punkcie ![]() względem ostatnich
względem ostatnich ![]() zmiennych:
zmiennych: ![]() zadana jest wzorem
zadana jest wzorem ![]()
Rozważmy powierzchnię opisaną przez układ ![]() równań:
równań:
gdzie ![]() otwarty. Przez
otwarty. Przez ![]() oznaczmy stożek kierunków stycznych do
oznaczmy stożek kierunków stycznych do ![]() punkcie
punkcie ![]() .
.
Twierdzenie 8.5
Załóżmy, że funkcje ![]() ,
, ![]() są klasy
są klasy ![]() ,
, ![]() , na otoczeniu
, na otoczeniu ![]() oraz gradienty
oraz gradienty ![]() ,
, ![]() , są liniowo niezależne. Wówczas
, są liniowo niezależne. Wówczas
Ponadto, dla każdego ![]() istnieje
istnieje ![]() i krzywa
i krzywa ![]() klasy
klasy ![]() o tej własności, że
o tej własności, że ![]() oraz
oraz ![]() .
.
Dowód
Pokażemy najpierw, że ![]() . Niech
. Niech ![]() . Wówczas
. Wówczas ![]() dla
dla ![]() ,
, ![]() . Z definicji pochodnej dostajemy dla każdego
. Z definicji pochodnej dostajemy dla każdego ![]() :
:
 |
czyli ![]() . Stąd wynika, że
. Stąd wynika, że ![]() .
.
Pozostało jeszcze zawieranie w drugą stronę. Dowód tej części będzie zdecydowanie trudniejszy. Ustalmy ![]() . Skonstruujemy krzywą przechodzącą przez
. Skonstruujemy krzywą przechodzącą przez ![]() i zawartą w
i zawartą w ![]() , której pochodna w punkcie
, której pochodna w punkcie ![]() jest równa
jest równa ![]() . Oznaczmy
. Oznaczmy ![]() i zdefiniujmy funkcję
i zdefiniujmy funkcję ![]() wzorem
wzorem
Zauważmy, że ![]() . Oznaczmy przez
. Oznaczmy przez ![]() macierz pochodnych cząstkowych względem zmiennych wektora
macierz pochodnych cząstkowych względem zmiennych wektora ![]() :
: ![]() W
W ![]() mamy
mamy ![]() . Przypomnijmy, że zgodnie z założeniem macierz
. Przypomnijmy, że zgodnie z założeniem macierz ![]() ma maksymalny rząd (równy
ma maksymalny rząd (równy ![]() ), czyli
), czyli ![]() jest odwracalna. Na mocy twierdzenia o funkcji uwikłanej istnieje zatem
jest odwracalna. Na mocy twierdzenia o funkcji uwikłanej istnieje zatem ![]() oraz funkcja
oraz funkcja ![]() klasy
klasy ![]() , taka że
, taka że ![]() . Połóżmy
. Połóżmy
Krzywa ta, zgodnie z konstrukcją, leży na powierzchni ![]() , tzn.
, tzn. ![]() dla
dla ![]() oraz
oraz ![]() . Różniczkując złożenie
. Różniczkując złożenie ![]() dostajemy
dostajemy
czyli w ![]() mamy
mamy
Z drugiej strony wiemy, że ![]() , czyli powyższa pochodna jest równa zero:
, czyli powyższa pochodna jest równa zero: ![]() . Przypomnijmy, że
. Przypomnijmy, że ![]() , co w naszym zapisie oznacza
, co w naszym zapisie oznacza ![]() . Wynika stąd, że
. Wynika stąd, że ![]() . Korzystając z faktu, że
. Korzystając z faktu, że ![]() ma rząd
ma rząd ![]() dostajemy
dostajemy ![]() . Jesteśmy już teraz gotowi, aby dokończyć dowód. Różniczkując funkcję
. Jesteśmy już teraz gotowi, aby dokończyć dowód. Różniczkując funkcję ![]() dostajemy
dostajemy
co w ![]() daje
daje ![]() . Możemy stąd już łatwo wywnioskować, że
. Możemy stąd już łatwo wywnioskować, że ![]() .
.
Uwaga 8.1
Powyższe twierdzenie dowodzi powszechnie znanego faktu dotyczącego przestrzeni stycznej do rozmaitości. Otóż, z założeń wynika, że ![]() jest lokalnie wokół punktu
jest lokalnie wokół punktu ![]() rozmaitością różniczkową klasy
rozmaitością różniczkową klasy ![]() . Przestrzeń styczna do rozmaitości w punkcie
. Przestrzeń styczna do rozmaitości w punkcie ![]() definiowana jest jako zbiór wektorów, które są pochodnymi (w punkcie
definiowana jest jako zbiór wektorów, które są pochodnymi (w punkcie ![]() ) krzywych leżących na tej rozmaitości i przechodzących przez
) krzywych leżących na tej rozmaitości i przechodzących przez ![]() (jest to równoważne definicji
(jest to równoważne definicji ![]() ). Równość
). Równość ![]() oznacza, że przestrzeń styczna jest jądrem przekształcenia liniowego
oznacza, że przestrzeń styczna jest jądrem przekształcenia liniowego ![]() .
.
Z powyższego twierdzenia będziemy wielokrotnie korzystać w następnych rozdziałach. Będzie ono głównym narzędziem przy dowodzeniu warunku koniecznego drugiego rzędu. W tym rozdziale pozwoli łatwo wykazać równość ![]() przy założeniu warunku liniowej niezależności.
przy założeniu warunku liniowej niezależności.
Twierdzenie 8.6
Jeśli w punkcie ![]() spełniony jest warunek liniowej niezależności, to zachodzi równość
spełniony jest warunek liniowej niezależności, to zachodzi równość ![]() .
.
Dowód
Ustalmy ![]() . Niech
. Niech ![]() . Na mocy twierdzenia 8.5 istnieje krzywa
. Na mocy twierdzenia 8.5 istnieje krzywa ![]() , taka że
, taka że ![]() ,
, ![]() oraz
oraz ![]() ,
, ![]() , i
, i ![]() ,
, ![]() Ustalmy
Ustalmy ![]() . Połóżmy
. Połóżmy ![]() ,
, ![]() . Wówczas
. Wówczas ![]() , czyli istnieje
, czyli istnieje ![]() , takie że
, takie że ![]() dla
dla ![]() . Z ciągłości,
. Z ciągłości, ![]() na pewnym otoczeniu
na pewnym otoczeniu ![]() dla
dla ![]() . Podsumowując, istnieje
. Podsumowując, istnieje ![]() , takie że
, takie że ![]() dla
dla ![]() . Stąd trywialnie
. Stąd trywialnie ![]() .
.
Dowód zawierania ![]() jest identyczny do dowodu lematu 5.2.
jest identyczny do dowodu lematu 5.2.


