14. Wykład XIV, 15.I.2010
Pod koniec poprzedniego wykładu poznaliśmy klasę funkcji wielu zmiennych,
które są pseudo-wklęsłe lub pseudo-wypukłe. Najważniejszą dla nas sprawą
związaną z tymi funkcjami jest to, że zachodzi dla nich wersja twierdzenia
Karusha-Kuhna-Tuckera! Czasami mówi się krótko, że to twierdzenie, i to
w formacie `wteddy', jest też prawdziwe w kategorii pseudo-wypukłej. Podajemy
je tutaj, bez dowodu jak i Twierdzenie 9.2, w nienajogólniejszej
wersji – tylko przy ograniczeniach nierównościowych (bez równościowych, bo
w zastosowaniu nasze funkcje będą niezmiennicze ze względu na skalowanie
argumentu). Ponadto warunki nierównościowe są tylko w postaci liniowej.
Większej ogólności nie potrzebujemy; byłaby tylko naszym wrogiem, nie
zaś sojusznikiem.
(Większą ogólność czytelnik znajdzie już w pionierskiej pracy [18].
To właśnie tam, na stronie 281, zdefiniowane zostały funkcje pseudo-wklęsłe
i pseudo-wypukłe, natomiast Theorem 1 na stronach 284-5 jest ogólną wersją
twierdzenia typu K-KT w kategorii pseudo-wypukłej i w formacie `wteddy'.
Nazwisko Karush nie pojawia się w [18]. Warto też zwrócić uwagę
na `Section 3. Remarks on pseudo-convex functions' na stronach 288-9.
Lokalne minimum jest zawsze dla tych funkcji globalnym minimum (!)
i własność tę dziedziczy nawet pewna jeszcze szersza klasa funkcji
ściśle quasi-wypukłych, także zdefiniowana w [18].)
Twierdzenie 14.1 (Karush; Kuhn, Tucker; wersja znacznie późniejsza, w kategorii pseudo-wypukłej)
Niech ![]() będzie otwarty i wypukły, zaś
będzie otwarty i wypukły, zaś
![]() będzie pseudo-wklęsła (pseudo-wypukła)
na
będzie pseudo-wklęsła (pseudo-wypukła)
na ![]() . Niech ponadto punkt
. Niech ponadto punkt ![]() spełnia warunki
spełnia warunki
| (14.1) |
gdzie ![]() ,
, ![]() . Wtedy
. Wtedy ![]() jest punktem
globalnego warunkowego maksimum (minimum) funkcji
jest punktem
globalnego warunkowego maksimum (minimum) funkcji ![]() przy
warunkach (ograniczeniach) (14.1)
przy
warunkach (ograniczeniach) (14.1) ![]()
 |
 |
Z punktu widzenia formalnego prawie nie ma tu różnic z wersją podaną
w Wykładzie IX jako Twierdzenie 9.2. I wtedy i teraz mamy bowiem
do czynienia z produktami pochodnymi od fundamentalnych rezultatów
zawartych w pracach [11] i [14], o czym była już
mowa w Wykładzie IX. Należy jednak pamiętać – powtarzamy to –
że Karush oraz Kuhn z Tuckerem dawali tylko warunki konieczne dla
ekstremum warunkowego z ograniczeniami nierównościowymi. Dopiero
w kategorii wypukłej (Twierdzenie 9.2) bądź pseudo-wypukłej
(Twierdzenie 14.1) stają się one warunkami równoważnymi, i
to od razu na globalne ekstremum warunkowe.
Teraz do dzieła: wyruszamy na poszukiwanie w analizie portfelowej
funkcji pseudo-wklęsłej określonej na dziedzinie wypukłej, i do tego
mającej odpowiednie maksimum warunkowe.
Szczegółowa analiza funkcji prowadzącej do współczynnika Sharpe'a
Innym – a przy tym w analizie portfelowej najważniejszym! – przykładem
funkcji, która nie jest ani wklęsła, ani wypukła, jest tzw.
pre-współczynnik Sharpe'a. Dokładniej, mając dane ![]() ,
gdzie
,
gdzie ![]() ,
, ![]() (to nasze dawne założenie (5.2))
oraz:
(to nasze dawne założenie (5.2))
oraz: ![]() w aspekcie B,
względnie
w aspekcie B,
względnie ![]() w aspekcie
M, rozważamy funkcję
w aspekcie
M, rozważamy funkcję
| (14.2) |
określoną na otwartym i wypukłym (co widoczne) zbiorze ![]() .
.
Zauważamy od razu, że gdy ![]() oraz
oraz ![]() , wtedy
, wtedy ![]() jest
po prostu współczynnikiem Sharpe'a, przy stopie bezryzykownej wynoszącej
jest
po prostu współczynnikiem Sharpe'a, przy stopie bezryzykownej wynoszącej ![]() ,
portfela
,
portfela ![]() . Jest tak zarówno w aspekcie B, jak i M.
. Jest tak zarówno w aspekcie B, jak i M.
Co prawda – szczegół dość istotny – w żadnym z aspektów nie liczymy tak współczynników Sharpe'a wszystkich dostępnych portfeli, a tylko tych, które mają ten współczynnik dodatni. Idzie jednak o jego maksymalizację i w każdym z aspektów jasno widać, że są portfele o tym współczynniku dodatnim.
Obserwacja. 14.1 Przy wymienionych wyżej założeniach, każda taka
funkcja ![]() [którą w analizie portfelowej chcemy maksymalizować] nie jest
wklęsła na
[którą w analizie portfelowej chcemy maksymalizować] nie jest
wklęsła na ![]() .
.
Uzasadnienie.47zadziwiająco niekrótkie, zastępujące inne, nie do końca
przekonywujące, podane podczas samych wykładów (w [13] treść Obserwacji 14.1
była zadaniem z gwiazdką) Oznaczając dla krótkości ![]() (
(![]() , bo (5.2)), mamy zwartą postać wzoru na funkcję
, bo (5.2)), mamy zwartą postać wzoru na funkcję ![]() ,
,
![]() ,
dzięki czemu szybko liczymy jej gradient:
,
dzięki czemu szybko liczymy jej gradient:
| (14.3) |
Pokażemy, że w dziedzinie ![]() niezwykle często zachodzi
nierówność pojawiająca się w definicji ścisłej wypukłości
funkcji różniczkowalnych,
niezwykle często zachodzi
nierówność pojawiająca się w definicji ścisłej wypukłości
funkcji różniczkowalnych,
| (14.4) |
Szukamy zatem takich ,,złych” par ![]() , że
, że
 |
(porównaj (14.3)). Lub, równoważnie,
 |
Lub jeszcze równoważnie,
 |
(14.5) |
Jak to spełnić? Okaże się, że da się to uzyskać przy dowolnym wektorze
![]() takim, że
takim, że ![]() , albo, co tutaj równoważne,
, albo, co tutaj równoważne,
![]() . Ustalmy dowolny taki właśnie wektor
. Ustalmy dowolny taki właśnie wektor ![]() .
.
Zmieniajmy teraz ![]() , biorąc
, biorąc ![]() zamiast
zamiast ![]() ,
, ![]() . Wtedy nowa lewa
strona w (14.5) to (stara LHS)
. Wtedy nowa lewa
strona w (14.5) to (stara LHS)![]() , podczas gdy prawa strona
w (14.5) pozostaje niezmienna! Wystarczy więc, by stara LHS była
dodatnia. Wtedy (biorąc dostatecznie duże
, podczas gdy prawa strona
w (14.5) pozostaje niezmienna! Wystarczy więc, by stara LHS była
dodatnia. Wtedy (biorąc dostatecznie duże ![]() ) już łatwo uzyskamy pożądaną
nierówność dla poprawionej pary wektorów
) już łatwo uzyskamy pożądaną
nierówność dla poprawionej pary wektorów ![]() i
i ![]() . Jak więc zapewnić sobie
. Jak więc zapewnić sobie
![]() ?
?
Szukajmy takich wektorów ![]() (jeszcze przed ich ewentualnym przeskalowaniem)
w postaci
(jeszcze przed ich ewentualnym przeskalowaniem)
w postaci ![]() . Po podstawieniu i skróceniu wyrazów ma więc być
. Po podstawieniu i skróceniu wyrazów ma więc być
![]() ,
albo równoważnie
,
albo równoważnie
| (14.6) |
Wektor w nawiasie jest niezerowy – po to właśnie zrobiliśmy założenie ![]() .
Łatwo zatem znaleźć taki wektor
.
Łatwo zatem znaleźć taki wektor ![]() , by zachodziła nierówność (14.6) i przy
tym taki, by
, by zachodziła nierówność (14.6) i przy
tym taki, by ![]() . (Np, wobec otwartości zbioru
. (Np, wobec otwartości zbioru ![]() , dobry jest każdy
, dobry jest każdy ![]() spełniający (14.6) i dostatecznie mały co do długości; euklidesowej, czy
też wyznaczonej przez iloczyn skalarny dawany macierzą
spełniający (14.6) i dostatecznie mały co do długości; euklidesowej, czy
też wyznaczonej przez iloczyn skalarny dawany macierzą ![]() – bez znaczenia.)
– bez znaczenia.)
To już koniec (at long last!) uzasadniania Obserwacji 14.1. Nierówność (14.5)
zachodzi dla wektorów ![]() oraz
oraz ![]() wyspecyfikowanych w trakcie tego
uzasadniania. Reasumując, pasują tu m. in. prawie wszystkie
wyspecyfikowanych w trakcie tego
uzasadniania. Reasumując, pasują tu m. in. prawie wszystkie ![]() wraz
z dobieranymi do tych
wraz
z dobieranymi do tych ![]() -ów z ogromną swobodą wektorami
-ów z ogromną swobodą wektorami ![]() .
.
Przykład 14.1
Prześledźmy jeszcze etapy powyższego uzasadnienia na konkretnym przykładzie
Weźmy więc np ![]() ; wtedy nierówność
(14.6) jest oczywiście spełniona. Czy dla tego
; wtedy nierówność
(14.6) jest oczywiście spełniona. Czy dla tego ![]() oraz
oraz ![]() od razu spełniona jest nierówność (14.5)?
od razu spełniona jest nierówność (14.5)?
Otóż nie, bo ![]() . Lewą stronę trzeba pomocniczo
pomnożyć przez dostatecznie dużą liczbę
. Lewą stronę trzeba pomocniczo
pomnożyć przez dostatecznie dużą liczbę ![]() . Tutaj np wystarcza wziąć
. Tutaj np wystarcza wziąć
![]() , bo już
, bo już ![]() .
Wtedy dla
.
Wtedy dla ![]() jw i nowego
jw i nowego
mamy już jak w (14.4). Mianowicie ![]() ,
, ![]() ,
, ![]() , no i
, no i
 |
Uwaga 14.1
Przykład 14.1 pokazuje też przy okazji, że pre-współczynnik Sharpe'a
nie jest różniczkowalną funkcją wypukłą (choć taka wiadomość jest dla
nas zupełnie marginesowa, bo przecież chcemy ten współczynnik maksymalizować,
nie zaś minimalizować). Istotnie, przed przeskalowaniem wektora ![]() mieliśmy tam nierówność
mieliśmy tam nierówność ![]() :
:
![]() łamiącą
różniczkowalną wypukłość.
łamiącą
różniczkowalną wypukłość.
Uwaga 14.2
Uzasadnienie Obserwacji 14.1 nie poszło nam szybko, bo
chodziło o pewne nierówności charakterystyczne dla ścisłej wypukłości
funkcji różniczkowalnych. Takie nierówności są – w sytuacji z Obserwacji
14.1 – sprawą delikatną. Mianowicie, w (14.5) szukane były
pary ![]() takie, że
takie, że
 |
przy czym oba składniki po prawej stronie były, z definicji zbioru ![]() ,
dodatnie. Zakładając nawet, że
,
dodatnie. Zakładając nawet, że ![]() , tzn., że i po
lewej stronie oba składniki były dodatnie, mimo wszystko iloczyn tych
składników po lewej stronie, czyli liczba
, tzn., że i po
lewej stronie oba składniki były dodatnie, mimo wszystko iloczyn tych
składników po lewej stronie, czyli liczba
 |
był, z nierówności Schwarza, niewiększy niż iloczyn ![]() składników po prawej stronie; najczęściej zaś był po prostu mniejszy. Otóż
potrzeba pewnej gimnastyki, by przy mniejszym iloczynie dwóch czynników
mieć (jednak) większą sumę tych czynników. Taką sytuację udało nam
się w sposób ścisły wygenerować.
składników po prawej stronie; najczęściej zaś był po prostu mniejszy. Otóż
potrzeba pewnej gimnastyki, by przy mniejszym iloczynie dwóch czynników
mieć (jednak) większą sumę tych czynników. Taką sytuację udało nam
się w sposób ścisły wygenerować.
Natomiast okazuje się, że takie funkcje ![]() są pseudo-wklęsłe.
są pseudo-wklęsłe.
Twierdzenie 14.2
Przy założeniach jak na początku bieżącego wykładu,
pre-współczynnik Sharpe'a ![]() jest funkcją pseudo-wklęsłą na
jest funkcją pseudo-wklęsłą na ![]() .
.
Zakładamy, że ![]() , przy czym
gradient(y)
, przy czym
gradient(y) ![]() został(y) już policzony(e)
w uzasadnieniu Obserwacji 14.1 powyżej. Zapisujemy to w postaci
rozwiniętej
został(y) już policzony(e)
w uzasadnieniu Obserwacji 14.1 powyżej. Zapisujemy to w postaci
rozwiniętej
albo równoważnie – patrz lewa nierówność poniżej, a potem kontynuując dalej (prawa nierówność poniżej) przy pomocy nierówności Schwarza:
 |
To już daje
 |
Maksymalizacja współczynnika Sharpe'a, w aspekcie M i przy silnych założeniach.
Aspekt M oznacza, że chcemy maksymalizować pre-współczynnik
Sharpe'a ![]() na zbiorze
na zbiorze ![]() . Nie ma więc tu żadnych
ograniczeń równościowych (pracujemy z pre-współczynnikiem niezmienniczym
ze względu na skalowania), zaś ograniczenia nierównościowe to właśnie
. Nie ma więc tu żadnych
ograniczeń równościowych (pracujemy z pre-współczynnikiem niezmienniczym
ze względu na skalowania), zaś ograniczenia nierównościowe to właśnie
![]() (jedna nierówność wektorowa skrywająca
(jedna nierówność wektorowa skrywająca ![]() nierówności
skalarnych). W tej części zakładamy, że
nierówności
skalarnych). W tej części zakładamy, że ![]() . Zaraz puścimy
w ruch budowaną od dawna maszynerię.
. Zaraz puścimy
w ruch budowaną od dawna maszynerię.
Jest niezmiernie ważne, że punkty maksymalizujące funkcję ![]() na
na ![]() przy podanych ograniczeniach w ogóle istnieją – że mamy
czego szukać przy pomocy Twierdzeń 14.1 i 14.2.
przy podanych ograniczeniach w ogóle istnieją – że mamy
czego szukać przy pomocy Twierdzeń 14.1 i 14.2.
Istotnie, z racji dodatniej jednorodności stopnia 0 funkcji ![]() można
rozważać tylko argumenty z
można
rozważać tylko argumenty z ![]() , zaś skoro o maksymalizację
, zaś skoro o maksymalizację
![]() chodzi, to ,,nic złego nam nie dojdzie” gdy będziemy rozważać
wszystkie portfele z
chodzi, to ,,nic złego nam nie dojdzie” gdy będziemy rozważać
wszystkie portfele z ![]() (bo wobec założeń o
(bo wobec założeń o ![]() istnieją portfele
istnieją portfele ![]() , dla których
, dla których ![]() , więc maksymalizacja
, więc maksymalizacja
![]() i tak odbywać się będzie w części
i tak odbywać się będzie w części ![]() ). Dalej to
już standard z pogranicza analizy i topologii: ciągłość
). Dalej to
już standard z pogranicza analizy i topologii: ciągłość ![]() na zwartym
zbiorze
na zwartym
zbiorze ![]() i twierdzenie Weierstrassa.
i twierdzenie Weierstrassa.
Tak więc maksimum funkcji ![]() na
na ![]() jest
osiągane. Przechodzimy teraz do wyłuskiwania tych miejsc, gdzie to
się dzieje. Będzie ich dużo, bo przecież wspomniana dodatnia
jednorodność stopnia 0.
jest
osiągane. Przechodzimy teraz do wyłuskiwania tych miejsc, gdzie to
się dzieje. Będzie ich dużo, bo przecież wspomniana dodatnia
jednorodność stopnia 0.
W Twierdzeniu 14.1 przyjmujemy ![]() oraz
oraz ![]() ,
, ![]() dla
dla ![]() . Wtedy warunki (14.1) właśnie kodują
nieujemność wszystkich składowych wektora
. Wtedy warunki (14.1) właśnie kodują
nieujemność wszystkich składowych wektora ![]() . (Spotykaliśmy się już
z takim kodowaniem nieujemności składowych portfela Markowitza przy
stosowaniu Twierdzenia 9.2. Można powiedzieć, że jest to dla
nas chleb powszedni.)
. (Spotykaliśmy się już
z takim kodowaniem nieujemności składowych portfela Markowitza przy
stosowaniu Twierdzenia 9.2. Można powiedzieć, że jest to dla
nas chleb powszedni.)
Na mocy Twierdzenia 14.1, ![]() jest punktem
(pre-portfelem) maksymalizującym
jest punktem
(pre-portfelem) maksymalizującym ![]() na
na ![]() wtedy i
tylko wtedy, gdy istnieją niedodatnie współczynniki
wtedy i
tylko wtedy, gdy istnieją niedodatnie współczynniki
![]() takie, że
takie, że
-
 oraz
oraz
-
 (z warunku
komplementarności).
(z warunku
komplementarności).
Pierwszy z tych wzorów pokazuje, że gradient ![]() w
w ![]() jest niedodatni
jako wektor i równocześnie mówi, że współczynniki
jest niedodatni
jako wektor i równocześnie mówi, że współczynniki ![]() są po
prostu składowymi tego wektora gradientu. To pozwala dużo bardziej
operatywnie zapisać drugi wzór, i łącznie w ten sposób
są po
prostu składowymi tego wektora gradientu. To pozwala dużo bardziej
operatywnie zapisać drugi wzór, i łącznie w ten sposób
-

 oraz
oraz -

 .
.
Teraz należy rozszyfrować ![]() pamiętając, że
pamiętając, że
![]() .
Pisząc jako
.
Pisząc jako![]() pewną dodatnią wielokrotność portfela
pewną dodatnią wielokrotność portfela ![]() ,
, ![]() oznacza
oznacza
zaś ![]() oznacza
oznacza
![]() ,
albo równoważnie
,
albo równoważnie
przy czym oczywiście ![]() ,
, ![]() .
To właśnie są nasze stare dobrze znajome związki (11.10).
.
To właśnie są nasze stare dobrze znajome związki (11.10).
Uzasadnienie sposobu szukania portfeli optymalnych ![]() w teorii Tobina przy
w teorii Tobina przy ![]() jest teraz zakończone. (W końcówce trochę
szybko to poszło; czytelnik nie takiej końcówki się spodziewał po długim
wstępie.) Jednak – uwaga – dalece nie jest zakończone przy
ogólniejszych macierzach
jest teraz zakończone. (W końcówce trochę
szybko to poszło; czytelnik nie takiej końcówki się spodziewał po długim
wstępie.) Jednak – uwaga – dalece nie jest zakończone przy
ogólniejszych macierzach ![]() . Tym przypadkiem zajmiemy się
niebawem.
. Tym przypadkiem zajmiemy się
niebawem.
W tym momencie narzuca się, tak: wręcz narzuca się pytanie, czy
rozwinięta tu powyżej technika pracy z pre-współczynnikiem Sharpe'a
![]() nie wyprodukowałaby jeszcze raz (niejako po drodze) wzoru na
portfele optymalne
nie wyprodukowałaby jeszcze raz (niejako po drodze) wzoru na
portfele optymalne ![]() w zmodyfikowanej teorii Tobina,
tj przy z powrotem dopuszczanej nieograniczonej krótkiej sprzedaży
i, oczywiście, dla
w zmodyfikowanej teorii Tobina,
tj przy z powrotem dopuszczanej nieograniczonej krótkiej sprzedaży
i, oczywiście, dla ![]() .
.
Odpowiedź jest twierdząca, bo przecież zerowanie się gradientu funkcji
pseudo-wklęsłej w punkcie zbioru otwartego wypukłego jest równoważne
jej maksymalizacji na tym zbiorze w tym właśnie punkcie: konieczność
tego warunku to fakt ogólny z AM II, sięgający wstecz aż do Fermata
(połowa XVII wieku), natomiast jego dostateczność wynika z samej
definicji – patrz Definicja 13.1 w Wykładzie XIII.
Mając zatem jakiś ![]() taki, że
taki, że
zapisujemy ten fakt w postaci
| (14.7) |
Skoro ten ![]() spełnia (14.7), to wszystkie
spełnia (14.7), to wszystkie ![]() też spełniają (14.7). Zatem wszystkie
też spełniają (14.7). Zatem wszystkie ![]() ,
,
![]() , spełniają (14.7), a wśród nich ten dla
, spełniają (14.7), a wśród nich ten dla
![]() , tzn.
portfel
, tzn.
portfel ![]() . Rozumiemy to tak, że wiele
punktów w
. Rozumiemy to tak, że wiele
punktów w ![]() maksymalizuje
maksymalizuje ![]() , lecz wśród nich jest
tylko jeden portfel — właśnie portfel
, lecz wśród nich jest
tylko jeden portfel — właśnie portfel
![]() .
.
Maksymalizacja współczynnika Sharpe'a, w aspekcie M i teraz przy słabszych założeniach.
Założenie (5.2) jest nie do podważenia – nie mogą wszystkie
wartości oczekiwane stóp zwrotu z walorów giełdowych być takie same;
mapa Markowitza musi być dwuwymiarowa! Za to do rozważenia jest
osłabienie założenia ![]() . W tej części Wykładu XIV
zakładamy tylko, że
. W tej części Wykładu XIV
zakładamy tylko, że ![]() . Jaką wtedy mamy wiedzę nt portfeli
optymalnych?
. Jaką wtedy mamy wiedzę nt portfeli
optymalnych?
Jeśli chodzi o aspekt B, to takie osłabienie wiedzy nt
macierzy kowariancji, nawet bez zerowania się ryzyka niektórych
portfeli, może prowadzić do nieistnienia portfeli optymalnych
ze względu na jakąkolwiek ustaloną stopę bezryzykowną. Pamiętamy
jeszcze Przykład 7.1 w Wykładzie VII, gdzie po przejściu od aspektu
M do aspektu B portfele efektywne po prostu wyparowały.
Tymczasem portfel optymalny względem jakiejś stopy ![]() musiałby być
efektywny; optymalnych więc nie ma. Zresztą granica minimalna jest
pionową prostą
musiałby być
efektywny; optymalnych więc nie ma. Zresztą granica minimalna jest
pionową prostą ![]() jak na Rysunku 7.1,
i współczynnik Sharpe'a każdego portfela krytycznego łatwo jest
(graficznie) powiększyć.
jak na Rysunku 7.1,
i współczynnik Sharpe'a każdego portfela krytycznego łatwo jest
(graficznie) powiększyć.
Dużo ciekawszy jest aspekt M, kiedy to większość dotychczasowych
rozważań przechodzi, co prawda tylko dla odpowiednio wybranych wartości
![]() .
.
Po pierwsze, przy macierzy kowariancji nieujemnie określonej ryzyko
portfeli Markowitza nie musi schodzić do zera; widzieliśmy
to już w ćwiczeniu w Uwadze 7.2. Wtedy dodatkowe ograniczenie dolne
na ![]() zaproponowane w (14.8) poniżej jest puste. Często
jednak ryzyko schodzi do zera (choćby w modelach doskonale
zaproponowane w (14.8) poniżej jest puste. Często
jednak ryzyko schodzi do zera (choćby w modelach doskonale ![]() skorelowanych), i wtedy w mianowniku wyrażenia definiującego
współczynnik Sharpe'a może (czy: mogłaby) dziać się katastrofa. By jej
uniknąć,48by, jak mówią anglosasi, be on the safe side
zakładamy w dalszym ciągu, że
skorelowanych), i wtedy w mianowniku wyrażenia definiującego
współczynnik Sharpe'a może (czy: mogłaby) dziać się katastrofa. By jej
uniknąć,48by, jak mówią anglosasi, be on the safe side
zakładamy w dalszym ciągu, że
| (14.8) |
(piszemy ![]() zamiast
zamiast ![]() , bo znowu w grę wchodzi ciągła
funkcja
, bo znowu w grę wchodzi ciągła
funkcja ![]() na zbiorze zwartym).
na zbiorze zwartym).
Uwaga. Jeśli w ![]() nie ma portfeli o zerowym ryzyku,
to dodatkowego dolnego ograniczenia na
nie ma portfeli o zerowym ryzyku,
to dodatkowego dolnego ograniczenia na ![]() po prostu nie ma.
po prostu nie ma.
Pre-współczynnik Sharpe'a ![]() zdefiniujemy teraz nie na całym zbiorze
zdefiniujemy teraz nie na całym zbiorze ![]() zdefiniowanym w (14.2), tylko na o wiele mniejszym zbiorze [też,
jak i
zdefiniowanym w (14.2), tylko na o wiele mniejszym zbiorze [też,
jak i ![]() ] wypukłym i otwartym
] wypukłym i otwartym ![]() w
w ![]() ,
, ![]() .
W dobrym określeniu tej dziedziny dla
.
W dobrym określeniu tej dziedziny dla ![]() tkwi teraz główna trudność.
Szczególnie chodzi tu o wypukłość zbioru – funkcje pseudo-wklęsłe
potrzebują wszak wypukłej dziedziny!
tkwi teraz główna trudność.
Szczególnie chodzi tu o wypukłość zbioru – funkcje pseudo-wklęsłe
potrzebują wszak wypukłej dziedziny!
Uwaga. W ważnym fragmencie wykładu przedstawionym tu niżej
mignie też przez chwilę jedna najprostsza możliwość, gdy nowy ![]() będzie starym
będzie starym ![]() . Nie o to nam jednak głównie chodzi …
. Nie o to nam jednak głównie chodzi …
Konstrukcja dziedziny pre-współczynnika Sharpe'a gdy![]() .
.
Zauważamy, że zbiór
![]() jest niepusty
wypukły (co oczywiste) oraz nie zawiera portfeli o zerowym ryzyku, bo na
nich (jeśli takowe w
jest niepusty
wypukły (co oczywiste) oraz nie zawiera portfeli o zerowym ryzyku, bo na
nich (jeśli takowe w ![]() są) funkcjonał
są) funkcjonał ![]() jest ujemny
– patrz (14.8).
jest ujemny
– patrz (14.8).
Dla potrzeb dalszego rozumowania, niech ![]() .
Ten zbiór stanowi przeszkodę, choć wyjątkowo może nawet być pusty przy
macierzy
.
Ten zbiór stanowi przeszkodę, choć wyjątkowo może nawet być pusty przy
macierzy ![]() (znamy dobrze jeden taki przykład).
(znamy dobrze jeden taki przykład).
Jeśli zbiory ![]() i
i ![]() są rozłączne, to liczby
są rozłączne, to liczby ![]() tu poniżej
nie definiujemy. Natomiast jeśli mają one niepuste przecięcie,
to zauważamy, że wartości funkcji liniowej
tu poniżej
nie definiujemy. Natomiast jeśli mają one niepuste przecięcie,
to zauważamy, że wartości funkcji liniowej ![]() na zbiorach
na zbiorach ![]() oraz
oraz
![]() różnią się – patrz (14.8) – o pewną dodatnią
wielkość. Te dwa zbiory wartości są od siebie oddzielone na osi liczbowej,
natomiast funkcja
różnią się – patrz (14.8) – o pewną dodatnią
wielkość. Te dwa zbiory wartości są od siebie oddzielone na osi liczbowej,
natomiast funkcja ![]() jest jednostajnie ciągła. Zatem i
zbiory argumentów muszą być oddzielone w przestrzeni
jest jednostajnie ciągła. Zatem i
zbiory argumentów muszą być oddzielone w przestrzeni ![]() :
:
| (14.9) |
Trochę większy kłopot jest z częścią zbioru ![]() położoną poza
położoną poza ![]() — znowu: jeśli tylko jest ona niepusta. (Jeśli jest pusta, to z kolei
nie definiujemy liczby
— znowu: jeśli tylko jest ona niepusta. (Jeśli jest pusta, to z kolei
nie definiujemy liczby ![]() poniżej.)
poniżej.)
Mamy więc sytuację ![]() .
.
Przypuśćmy wówczas, że ![]() .
.
Istnieją zatem ciągi portfeli ![]() oraz
oraz
![]() takie, że
takie, że ![]() gdy
gdy ![]() . Sympleks
. Sympleks ![]() jest zwarty, więc istnieje podciąg
portfeli
jest zwarty, więc istnieje podciąg
portfeli ![]() zbieżny do jakiegoś portfela
zbieżny do jakiegoś portfela ![]() gdy
gdy ![]() . Oczywiście też
. Oczywiście też ![]() gdy
gdy ![]() .
.
Wobec ![]() dla
dla ![]() , i z ciągłości
funkcji
, i z ciągłości
funkcji ![]() na
na ![]() , mamy
, mamy ![]() .
W sytuacji, gdy
.
W sytuacji, gdy ![]() (tj gdy nie ma liczby
(tj gdy nie ma liczby
![]() ), sprzeczność jest już, bo jednak
), sprzeczność jest już, bo jednak ![]() .
.
Jeśli zaś ![]() (liczba
(liczba ![]() jest), wtedy
sprzeczność jeszcze przez chwilkę dokuwamy:
jest), wtedy
sprzeczność jeszcze przez chwilkę dokuwamy: ![]() ,
bo
,
bo ![]() dla
dla ![]() . Ta własność
hipotetycznego portfela Markowitza
. Ta własność
hipotetycznego portfela Markowitza ![]() wraz z
wcześniejszą wiadomością
wraz z
wcześniejszą wiadomością ![]() już dają
sprzeczność z lewą nierównością w (14.8).
już dają
sprzeczność z lewą nierównością w (14.8).
Tak, czy inaczej, portfel ![]() nie może istnieć.
Tym samym udowodniliśmy ad absurdum, że
nie może istnieć.
Tym samym udowodniliśmy ad absurdum, że
| (14.10) |
o ile tylko ![]() .
.
Mamy więc dwie warunkowo zdefiniowane liczby: ![]() i
i ![]() .
Warunkowość oznacza tu, że być może któraś z nich jest nieokreślona,
względnie nawet obie są nieokreślone (powtarzamy, że może
tak być nawet przy częściowo zdegenerowanej macierzy
.
Warunkowość oznacza tu, że być może któraś z nich jest nieokreślona,
względnie nawet obie są nieokreślone (powtarzamy, że może
tak być nawet przy częściowo zdegenerowanej macierzy ![]() ).
).
Jeśli obie te liczby są nieokreślone, albo innymi słowy ![]() ,
wtedy … nie dzieje się nic nowego pod słońcem49zasada brzytwy Ockhama
i kładziemy
,
wtedy … nie dzieje się nic nowego pod słońcem49zasada brzytwy Ockhama
i kładziemy ![]() . O tej rozczarowującej możliwości
wspominaliśmy już w Uwadze wyżej.
. O tej rozczarowującej możliwości
wspominaliśmy już w Uwadze wyżej.
Jeśli zaś przynajmniej jedna z tych liczb jest określona, to wnioskiem z (14.9) i/lub (14.10) jest
| (14.11) |
z naturalnym rozumieniem i rolą liczby ![]() gdy jednej z liczb delta
nie ma. Teraz już możemy skonstruować zbiór
gdy jednej z liczb delta
nie ma. Teraz już możemy skonstruować zbiór ![]() ,
, ![]() ,
otwarty w
,
otwarty w ![]() , wypukły i rozłączny z niebezpiecznym zbiorem
, wypukły i rozłączny z niebezpiecznym zbiorem ![]() :
:
| (14.12) |
gdzie ![]() to kula otwarta w hiperpłaszczyźnie
to kula otwarta w hiperpłaszczyźnie ![]() o środku w
o środku w ![]() i promieniu
i promieniu ![]() (zawsze w użyciu jest odległość euklidesowa, dziedziczona
w
(zawsze w użyciu jest odległość euklidesowa, dziedziczona
w ![]() z
z ![]() ).
).
Otwartość ![]() w
w ![]() jest jasna, rozłączność ze zbiorem
jest jasna, rozłączność ze zbiorem ![]() wynika
z (14.11) (kule w (14.12) są, przypominamy, otwarte).
Wypukłość
wynika
z (14.11) (kule w (14.12) są, przypominamy, otwarte).
Wypukłość ![]() wynika wprost z wypukłości
wynika wprost z wypukłości ![]() . Dokładniej, pożyteczne
jest samodzielnie rozwiązać następujące ogólne
. Dokładniej, pożyteczne
jest samodzielnie rozwiązać następujące ogólne
Ćwiczenie 14.1
W przestrzeni euklidesowej ![]() dany jest niepusty zbiór wypukły
dany jest niepusty zbiór wypukły ![]() ,
zaś
,
zaś ![]() jest ustaloną liczbą dodatnią. Uzasadnić, że zbiór
jest ustaloną liczbą dodatnią. Uzasadnić, że zbiór
![]() też jest wypukły w
też jest wypukły w ![]() .
.
Wybór ![]() dokonany w (14.12) jest kluczowy. To pewna
wypukła otoczka w
dokonany w (14.12) jest kluczowy. To pewna
wypukła otoczka w ![]() pewnej części sympleksu standardowego
pewnej części sympleksu standardowego ![]() .
Może to jednak być bardzo cienka otoczka w
.
Może to jednak być bardzo cienka otoczka w ![]() (
(![]() może być maleńkie dodatnie),
niewiele większa od samej otaczanej części sympleksu.
może być maleńkie dodatnie),
niewiele większa od samej otaczanej części sympleksu.
Niech teraz ![]() będzie po prostu stożkiem nad
będzie po prostu stożkiem nad ![]() ,
,
 |
(14.13) |
(prawa inkluzja jest oczywista). Skoro zbiór ![]() był wypukły i otwarty w
był wypukły i otwarty w ![]() ,
więc zbiór
,
więc zbiór ![]() zdefiniowany w (14.13) jest z kolei
wypukły i otwarty w
zdefiniowany w (14.13) jest z kolei
wypukły i otwarty w ![]() . Właśnie na takiej dziedzinie
. Właśnie na takiej dziedzinie ![]() rozważamy teraz pre-współczynnik Sharpe'a
rozważamy teraz pre-współczynnik Sharpe'a ![]() .
Dosyć ciężka walka została stoczona, by był on dobrze określony na całym
otwartym i wypukłym
.
Dosyć ciężka walka została stoczona, by był on dobrze określony na całym
otwartym i wypukłym ![]() (pamiętna rozłączność
(pamiętna rozłączność ![]() z
z ![]() na poziomie hiperpłaszczyzny
na poziomie hiperpłaszczyzny ![]() ).
).
Czy jest to właściwy punkt wyjścia do jego maksymalizacji na całym sympleksie
standardowym, oczywiście z wyłączeniem portfeli mających zerowe ryzyko?50Taka
propozycja dziedziny dla ![]() jest lekko niestandardowa. Ta dziedzina nie obejmuje przecież
całego
jest lekko niestandardowa. Ta dziedzina nie obejmuje przecież
całego ![]() bez portfeli zerowego ryzyka! Tak jest, lecz tak też było w łatwiejszej
sytuacji
bez portfeli zerowego ryzyka! Tak jest, lecz tak też było w łatwiejszej
sytuacji ![]() na początku tego wykładu; nie będzie to przeszkadzać w naszej maksymalizacji
na początku tego wykładu; nie będzie to przeszkadzać w naszej maksymalizacji
![]() . To tylko cena (niejedyna, też założenie (14.8)), jaką musimy zapłacić,
by mieć wypukłość dziedziny dla
. To tylko cena (niejedyna, też założenie (14.8)), jaką musimy zapłacić,
by mieć wypukłość dziedziny dla ![]() . Wyjaśnijmy to tutaj dokładniej. Lewą
nierówność w (14.8) można przepisać w postaci
. Wyjaśnijmy to tutaj dokładniej. Lewą
nierówność w (14.8) można przepisać w postaci
Skoro jest tak, to także
dla pewnego dostatecznie małego dodatniego ![]() . Wobec tego maksymalizacja
współczynnika Sharpe'a na zbiorze
. Wobec tego maksymalizacja
współczynnika Sharpe'a na zbiorze ![]() jest
tym samym, co jego maksymalizacja na zbiorze
jest
tym samym, co jego maksymalizacja na zbiorze ![]() – bo odpadają tylko pewne ujemne wartości funkcji, która przyjmuje też51zresztą
dokładnie na zbiorze
– bo odpadają tylko pewne ujemne wartości funkcji, która przyjmuje też51zresztą
dokładnie na zbiorze ![]() zdefiniowanym wcześniej wartości dodatnie. Na ostatnim
zapisanym tu zbiorze ten współczynnik jest funkcją ciągłą, zaś sam zbiór jest
zwarty. Przeto jego kres górny na tym zbiorze jest skończony i jest osiągany.
To właśnie było nam potrzebne, bo tym samym kres górny współczynnika Sharpe'a
na
zdefiniowanym wcześniej wartości dodatnie. Na ostatnim
zapisanym tu zbiorze ten współczynnik jest funkcją ciągłą, zaś sam zbiór jest
zwarty. Przeto jego kres górny na tym zbiorze jest skończony i jest osiągany.
To właśnie było nam potrzebne, bo tym samym kres górny współczynnika Sharpe'a
na ![]() jest skończony i osiągany!
Przy tym, rzecz prosta, jest on osiągany w punkcie, lub punktach, zbioru
jest skończony i osiągany!
Przy tym, rzecz prosta, jest on osiągany w punkcie, lub punktach, zbioru
![]() , który posłużył nam wcześniej do zaproponowania okrojonej dziedziny
dla pre-współczynnika
, który posłużył nam wcześniej do zaproponowania okrojonej dziedziny
dla pre-współczynnika ![]() .
.
Idziemy teraz za ciosem, bez straty ogólności pozostajemy w
naszej dziedzinie dla ![]() i z dodatniej jednorodności stopnia 0
funkcji
i z dodatniej jednorodności stopnia 0
funkcji ![]() dostajemy, że
dostajemy, że
![]() kres górny
kres górny ![]() na
na ![]() jest skończony i jest osiągany.
jest skończony i jest osiągany.
Twierdzenie 14.3
Gdy ![]() , wtedy warunki (11.10) skrywają wszystkie
portfele optymalne w aspekcie M ze względu na stopę
bezryzykowną
, wtedy warunki (11.10) skrywają wszystkie
portfele optymalne w aspekcie M ze względu na stopę
bezryzykowną ![]() spełniającą (14.8).
spełniającą (14.8).
Innymi słowy, również wtedy portfele optymalne (już niekoniecznie
jeden jedyny portfel optymalny!) znajduje się, rozwiązując liniowe
zagadnienie komplementarności (11.10).
Czytelnik domyśla się już, że kluczowy dla dowodu jest właśnie
fakt ![]() , czyli osiąganie największej wartości przez
, czyli osiąganie największej wartości przez
![]() na wymienionym tam zbiorze. Gdyż poza tym cały (gruby, otwarty)
na wymienionym tam zbiorze. Gdyż poza tym cały (gruby, otwarty)
![]() jest zbiorem wypukłym, na którym funkcja
jest zbiorem wypukłym, na którym funkcja ![]() jest
pseudo-wklęsła.
Tak samo, jak przy
jest
pseudo-wklęsła.
Tak samo, jak przy ![]() ten sam pre-współczynnik Sharpe'a był
pseudo-wklęsły na (o wiele większym) zbiorze
ten sam pre-współczynnik Sharpe'a był
pseudo-wklęsły na (o wiele większym) zbiorze ![]() .
(Czasami
.
(Czasami ![]() nie jest ,,o wiele większy”, tylko jest tym samym, co
nie jest ,,o wiele większy”, tylko jest tym samym, co
![]() , lecz to zupełny szczegół. W trudniejszych sytuacjach
, lecz to zupełny szczegół. W trudniejszych sytuacjach
![]() może być o wiele większy niż
może być o wiele większy niż ![]() .)
.)
Dowód pseudo-wklęsłości przechodzi bez zmian, bo skurczona dziedzina
jest wypukła, wzór na gradient ![]() pozostaje w mocy, zaś
nieostra nierówność Schwarza zachodzi też dla formy dwuliniowej
z nieujemnie określoną macierzą współczynników.
pozostaje w mocy, zaś
nieostra nierówność Schwarza zachodzi też dla formy dwuliniowej
z nieujemnie określoną macierzą współczynników.
Dalej zaś włącza się znowu do akcji Twierdzenie 14.1,
drugi raz tak samo prowadząc do warunków (11.10),
w 100![]() wiernie charakteryzujących punkty warunkowego
maksimum
wiernie charakteryzujących punkty warunkowego
maksimum ![]() przy warunkach nieujemności współrzędnych.
przy warunkach nieujemności współrzędnych.
Uwaga 14.3 (po dowodzie)
(i) W sytuacji łatwiejszej (początek tego wykładu) wycinaliśmy z ![]() część
część ![]() , a potem resztę powiększaliśmy do
stożka
, a potem resztę powiększaliśmy do
stożka ![]() (nad tą resztą budowaliśmy stożek
(nad tą resztą budowaliśmy stożek ![]() ).
).
Teraz w trudniejszej sytuacji też wycinamy tę część, lecz dodatkowo
musimy też wyciąć zbiór [nieprzyjemny, algebraiczny, niby ,,tylko”
stopnia 2, lecz przecież w wielu wymiarach!] ![]() . To wycięcie
sprawia pewien kłopot, jeśli chodzi o otwartą wypukłość tego, co
zostaje. Potem już tylko powiększamy do stożka
. To wycięcie
sprawia pewien kłopot, jeśli chodzi o otwartą wypukłość tego, co
zostaje. Potem już tylko powiększamy do stożka ![]() .
.
Po drodze ubezpieczamy się, postulując w (14.8), by
![]() .
To ubezpieczenie jest absolutnie naturalne – wystarczy je sobie zinterpretować
graficznie na pionowej osi na płaszczyźnie
.
To ubezpieczenie jest absolutnie naturalne – wystarczy je sobie zinterpretować
graficznie na pionowej osi na płaszczyźnie ![]() .
.
Zauważmy jeszcze, by postawić małą kropkę nad ,,i”, że w definicji
zbioru ![]() w (14.2) występował warunek
w (14.2) występował warunek ![]() .
Natomiast w definicji (14.13) zbioru
.
Natomiast w definicji (14.13) zbioru ![]() ten warunek eksplicite się nie pojawia i wręcz miejscami może nie
być spełniony w
ten warunek eksplicite się nie pojawia i wręcz miejscami może nie
być spełniony w ![]() .
.
Był on w definicji zbioru ![]() i był tam ważny, natomiast
mógł się zagubić przy rozszerzaniu
i był tam ważny, natomiast
mógł się zagubić przy rozszerzaniu ![]() do
do ![]() [stożkiem nad
którym jest
[stożkiem nad
którym jest ![]() ]. Dla samej maksymalizacji funkcji
]. Dla samej maksymalizacji funkcji ![]() nie ma to żadnego znaczenia, bo technika K-KT wyłuskuje nam
tutaj pre-portfele maksymalizujące
nie ma to żadnego znaczenia, bo technika K-KT wyłuskuje nam
tutaj pre-portfele maksymalizujące ![]() siedzące w
siedzące w
![]() , czyli w stożku nad
, czyli w stożku nad ![]() ,
gdzie z powrotem (czy: od początku) warunek
,
gdzie z powrotem (czy: od początku) warunek ![]() zachodzi.
zachodzi.
(ii) Twierdzenie 14.3 może zostać/zostanie w pełni ocenione
dopiero podczas wykładów APRK2, gdy staje/stanie się czymś nieodzownym
w badaniu ważnego modelu Alexandera ogłoszonego w roku 1993
w pracy [2], proponującego dość realistyczne podejście do
krótkiej sprzedaży. Nie tak krańcowo restryktywne, jak u Lintnera
(porównaj Wykład IX), i też nie tak krańcowo swobodne/nierealistyczne,
jak u Blacka i współautorów (porównaj Wykłady V i VI).
W modelu Alexandera macierze kowariancji tylko nieujemnie
określone są czymś najbardziej naturalnym pod słońcem.
Gdy to Twierdzenie 14.3 jest już udowodnione, najwyższa
pora na ilustrację, jak konkretnie tamte słynne warunki (11.10)
pracują w sytuacji, gdy macierz kowariancji jest tylko nieujemnie
określona.
W ćwiczeniu poniżej ograniczenie dolne na ![]() w (14.8)
jest puste, bo
w (14.8)
jest puste, bo ![]() . I nawet ,,gorzej”:
po prostu
. I nawet ,,gorzej”:
po prostu ![]() , więc w całej konstrukcji dziedziny dla
, więc w całej konstrukcji dziedziny dla
![]() powyżej można było wziąć
powyżej można było wziąć ![]() itd. Tym niemniej
macierz
itd. Tym niemniej
macierz ![]() jest tam tylko nieujemnie określona …
jest tam tylko nieujemnie określona …
Algorytm z Wykładu XI nie działa w sensie dosłownym
– nie możemy wszak odwracać macierzy ![]() . Mimo to, zgodnie
z Twierdzeniem 14.3, warunki (11.10) jednak dobrze
kodują portfele optymalne w aspekcie M. Rozwiążemy te warunki
(lecz dopiero w … Rozwiązaniu ćwiczenia!) ,,całościowo”, czyli
łącznie i z marszu rozwiążemy odpowiednie liniowe zagadnienie
komplementarności. Do dzieła zatem.
. Mimo to, zgodnie
z Twierdzeniem 14.3, warunki (11.10) jednak dobrze
kodują portfele optymalne w aspekcie M. Rozwiążemy te warunki
(lecz dopiero w … Rozwiązaniu ćwiczenia!) ,,całościowo”, czyli
łącznie i z marszu rozwiążemy odpowiednie liniowe zagadnienie
komplementarności. Do dzieła zatem.
Ćwiczenie 14.2
W słynnym już modelu Markowitza z ćwiczenia w Uwadze 7.2 (Wykład VII)
znaleźć portfele optymalne ze względu na bankową stopę bezryzykowną
![]() . (Podkreślamy, że tym razem chodzi o aspekt
M, bo aspektowi B w tym modelu zostało już
poświęcone Ćwiczenie 9.2 w Wykładzie IX.)
. (Podkreślamy, że tym razem chodzi o aspekt
M, bo aspektowi B w tym modelu zostało już
poświęcone Ćwiczenie 9.2 w Wykładzie IX.)
Wiemy już z Uwagi 7.2, że w tym modelu wszystkie portfele Markowitza
są portfelami relatywnie minimalnego ryzyka. Przy każdej ustalonej
wartości ![]() jest cały odcinek takich portfeli; dla skrajnych
wartości
jest cały odcinek takich portfeli; dla skrajnych
wartości ![]() odcinek degeneruje się do punktu – jednego portfela.
Więc dla wartości
odcinek degeneruje się do punktu – jednego portfela.
Więc dla wartości ![]() odpowiadającej ustalonej na pionowej
osi wartości
odpowiadającej ustalonej na pionowej
osi wartości ![]() powinniśmy mieć cały taki odcinek portfeli
optymalnych względem tej stopy bezryzykownej.
powinniśmy mieć cały taki odcinek portfeli
optymalnych względem tej stopy bezryzykownej.
Dokładniej, jaką pionową współrzędną ![]() ma punkt na górnym
,,wąsie” pocisku
ma punkt na górnym
,,wąsie” pocisku ![]() ,
, ![]() (wzór uzyskany
w Uwadze 7.2), w którym styczna do pocisku przecina oś
(wzór uzyskany
w Uwadze 7.2), w którym styczna do pocisku przecina oś ![]() na wysokości
na wysokości ![]() ?
?
Jest to standardowa geometria analityczna krzywych stożkowych, kiedyś obecna
w podręcznikach licealnych: ![]() .
Konkretnie, gdy
.
Konkretnie, gdy ![]() , wtedy
, wtedy ![]() .
.
Jakie portfele Markowitza przechodzą w mapie Markowitza na punkt pocisku Markowitza
położony na wysokości ![]() ?52jedno nazwisko występuje trzy razy w jednym
pytaniu, i wszystko jest najzupełniej legalne Na boku
?52jedno nazwisko występuje trzy razy w jednym
pytaniu, i wszystko jest najzupełniej legalne Na boku ![]() jest to portfel
jest to portfel  , natomiast na boku
, natomiast na boku ![]() — portfel
— portfel
![]() .
Zatem cały odcinek między tymi skrajnymi portfelami,
.
Zatem cały odcinek między tymi skrajnymi portfelami,
 |
przechodzi na punkt pocisku położony na wysokości ![]() . Gdy podstawimy
. Gdy podstawimy
![]() i policzymy
i policzymy ![]() , wtedy
zależność od
, wtedy
zależność od ![]() znika:
znika:
![]() . Teraz staje się jasne, jak realizuje
się krytyczność, o której mowa we wskazówce do Uwagi 7.2:
. Teraz staje się jasne, jak realizuje
się krytyczność, o której mowa we wskazówce do Uwagi 7.2:
Natomiast w terminach problemu (11.10) trzeba oczywiście wziąć
![]() , który dla rozważanych tu wartości
, który dla rozważanych tu wartości
![]() i
i ![]() ma wszystkie składowe nieujemne, no i mieć wtedy, właśnie całościowo
i niezależnie od oddzielnych etapów,
ma wszystkie składowe nieujemne, no i mieć wtedy, właśnie całościowo
i niezależnie od oddzielnych etapów, ![]() .
.
Normalizacja pre-portfela ![]() daje portfel
daje portfel ![]() optymalny
ze względu na stopę
optymalny
ze względu na stopę ![]() . Zależność tych portfeli od
. Zależność tych portfeli od ![]() jest
oczywiście afiniczna. Jest ich wiele przy ustalonej
jest
oczywiście afiniczna. Jest ich wiele przy ustalonej ![]() , nie ma
mowy o jakiejkolwiek jednoznaczności portfela optymalnego (od dawna
wiemy, że cały przykład jest co najmniej dziwny). Natomiast jak te
portfele zależą od
, nie ma
mowy o jakiejkolwiek jednoznaczności portfela optymalnego (od dawna
wiemy, że cały przykład jest co najmniej dziwny). Natomiast jak te
portfele zależą od ![]() ?
?
To też nic trudnego. Do znanego już wzoru na ![]() podstawiamy znalezioną zależność
podstawiamy znalezioną zależność ![]() , dostając
, dostając
 |
Ćwiczenie 14.3 (kontynuacja Ćwiczenia 14.2)
Znaleźć najmniejszą wartość stopy bezryzykownej ![]() , ze
względu na którą portfel
, ze
względu na którą portfel ![]() jest optymalny w modelu Markowitza z Ćwiczenia 14.2.
jest optymalny w modelu Markowitza z Ćwiczenia 14.2.
Wskazać jakąś inną większą stopę bezryzykowną, ze względu
na którą portfel ![]() także jest optymalny w aspekcie M.
także jest optymalny w aspekcie M.
Czy jest to jedyny portfel optymalny w aspekcie M przy
tej większej stopie bezryzykownej?
Na koniec tych rozważań o portfelach optymalnych ze względu na
stopę(y) ![]() w aspekcie M, przeprowadźmy jedną dłuższą
analizę ich zachowania i zmienności w trochę podkręconym przykładzie
Krzyżewskiego. Mianowicie, przy niezmienionej tamtej macierzy
kowariancji, przesuńmy wszystkie wartości oczekiwane o wielkość
3 w górę – rodzaj przesunięcia równoległego stóp, pojęcia
występującego m. in. w kursie Inżynierii Finansowej.
Tzn. rozważamy teraz model Markowitza
w aspekcie M, przeprowadźmy jedną dłuższą
analizę ich zachowania i zmienności w trochę podkręconym przykładzie
Krzyżewskiego. Mianowicie, przy niezmienionej tamtej macierzy
kowariancji, przesuńmy wszystkie wartości oczekiwane o wielkość
3 w górę – rodzaj przesunięcia równoległego stóp, pojęcia
występującego m. in. w kursie Inżynierii Finansowej.
Tzn. rozważamy teraz model Markowitza
 |
(14.14) |
wzbogacony o stopę wolną od ryzyka ![]() zmieniającą się od 0
do
zmieniającą się od 0
do ![]() . Te wartości graniczne stopy bezryzykownej są
uzasadnione geometrią przykładu i są po prostu wysokościami, na
których styczne do granicy minimalnej w obrazach portfeli
. Te wartości graniczne stopy bezryzykownej są
uzasadnione geometrią przykładu i są po prostu wysokościami, na
których styczne do granicy minimalnej w obrazach portfeli ![]() i
i ![]() przecinają pionową oś
przecinają pionową oś ![]() . (W samym przykładzie
Krzyżewskiego przedział wartości dla stopy bezryzykownej zaczynałby
się w
. (W samym przykładzie
Krzyżewskiego przedział wartości dla stopy bezryzykownej zaczynałby
się w ![]() — dość nieciekawej stopie zwrotu pozbawionej ryzyka.)
— dość nieciekawej stopie zwrotu pozbawionej ryzyka.)
Wiemy, że i tutaj cała granica minimalna jest efektywna, bo to
stary przykład Krzyżewskiego, tylko ,,kopnięty” o 3 w górę.
Portfele optymalne przy zmienianiu stopy ![]() przebiegają
więc całą łamaną wierzchołkową, która jest, oczywiście, identyczna
jak w przykładzie Krzyżewskiego – patrz Rysunek 7.5 w Wykładzie VII.
przebiegają
więc całą łamaną wierzchołkową, która jest, oczywiście, identyczna
jak w przykładzie Krzyżewskiego – patrz Rysunek 7.5 w Wykładzie VII.
Gdy więc przejeżdżamy wartością ![]() przedział
przedział ![]() ,
wtedy portfele optymalne
,
wtedy portfele optymalne ![]() jadą (bądź
stoją) kolejno po (w) częściach łamanej z Rysunku 7.5 położonych
na ścianach: (a)
jadą (bądź
stoją) kolejno po (w) częściach łamanej z Rysunku 7.5 położonych
na ścianach: (a) ![]() , (b)
, (b) ![]() , (c)
, (c) ![]() ,
(d)
,
(d) ![]() , (e)
, (e) ![]() , (f)
, (f) ![]() , (g)
, (g) ![]() .
.
Skomentujemy prawdziwe ruchy portfela optymalnego oraz jego postój
w wierzchołku ![]() . Nie przytaczamy szczegółowych obliczeń –
mogą to być (bardzo zalecane) dla czytelnika ćwiczenia
sprawdzające.
. Nie przytaczamy szczegółowych obliczeń –
mogą to być (bardzo zalecane) dla czytelnika ćwiczenia
sprawdzające.
Ad (b). Dzieje się tak dla ![]() ,
zaś wartość oczekiwana portfela optymalnego
,
zaś wartość oczekiwana portfela optymalnego ![]() zmienia się wtedy między 2 i
zmienia się wtedy między 2 i ![]() . Sam zaś ten portfel to
. Sam zaś ten portfel to
 |
Jego składowe są wyrażone funkcjami wymiernymi (homografiami) od
![]() . Jest to całkiem naturalne, bo przecież jego wartość oczekiwana
jest pewną homografią od
. Jest to całkiem naturalne, bo przecież jego wartość oczekiwana
jest pewną homografią od ![]() .
.
Ad (c). Dzieje się tak dla ![]() ,
zaś
,
zaś ![]() zmienia się wtedy między
zmienia się wtedy między ![]() i
i ![]() . Natomiast
. Natomiast
 |
Ad (d). Dzieje się tak dla ![]() ,
zaś
,
zaś ![]() zmienia się wtedy między
zmienia się wtedy między ![]() i 3.
Natomiast
i 3.
Natomiast
 |
Ad (e). Portfel optymalny stoi na ![]() , podczas gdy
, podczas gdy ![]() rośnie
od
rośnie
od ![]() do 2. Dostajemy proste nadstyczne w punkcie
do 2. Dostajemy proste nadstyczne w punkcie ![]() do granicy efektywnej, wszystko oczywiście w aspekcie M.
(
do granicy efektywnej, wszystko oczywiście w aspekcie M.
(![]() jest punktem załamania – kinkiem – na
granicy minimalnej.)
jest punktem załamania – kinkiem – na
granicy minimalnej.)
Ad (f). Dzieje się tak dla ![]() , zaś
, zaś
![]() zmienia się wtedy między 3 i 4. Natomiast
zmienia się wtedy między 3 i 4. Natomiast
 |
Spróbujmy raz jeden zobrazować wszystkie te portfele optymalne dynamicznie
na jednym wspólnym rysunku, na osi odciętych odkładając wartości ![]() , zaś
na pionowych prostych, nad odpowiednimi wartościami stopy
, zaś
na pionowych prostych, nad odpowiednimi wartościami stopy ![]() , zaznaczając
różnymi kolorami wkłady odpowiednich walorów do portfela optymalnego.
Konkretnie: kolorem ciemnozielonym zaznaczając wkład waloru 1, czerwonym –
waloru 2, niebieskim – waloru 3. Oto wynik takiego obrazowania:
, zaznaczając
różnymi kolorami wkłady odpowiednich walorów do portfela optymalnego.
Konkretnie: kolorem ciemnozielonym zaznaczając wkład waloru 1, czerwonym –
waloru 2, niebieskim – waloru 3. Oto wynik takiego obrazowania:
[w wersji pdf chochlik drukarski przerzucił diagram na następną stronę]
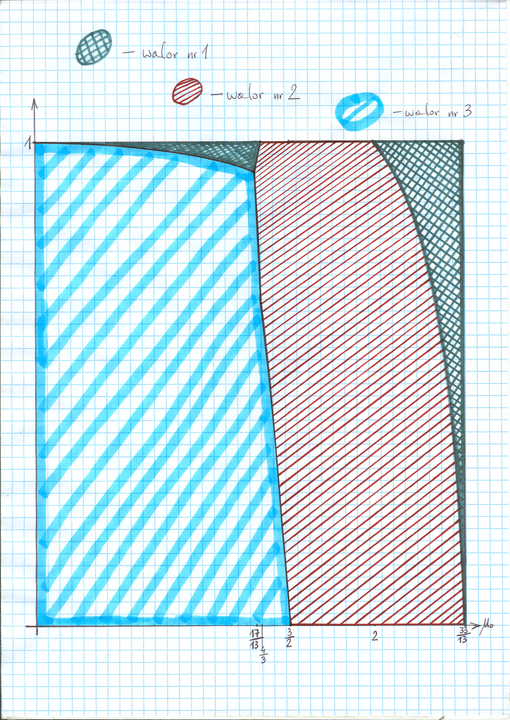
Łamana efektywna jest tu, jak wiemy, bardzo bogata. Jej wizualizacja
graficzna podana w funkcji parametru ![]() trochę rozczarowuje –
widać chyba mniej, niż na Rysunku 7.5. W ramach porównywania tamtego
rysunku z obecnym Rysunkiem 14.1, można zadać sobie pytanie (oczywiście kontrolne),
czy na obecnym umiemy wskazać punkty, w których, na dawnym,
prosta krytyczna przecina boki sympleksu standardowego.
trochę rozczarowuje –
widać chyba mniej, niż na Rysunku 7.5. W ramach porównywania tamtego
rysunku z obecnym Rysunkiem 14.1, można zadać sobie pytanie (oczywiście kontrolne),
czy na obecnym umiemy wskazać punkty, w których, na dawnym,
prosta krytyczna przecina boki sympleksu standardowego.
Jest to nietrudne w przypadku portfela krytycznego niemającego waloru numer 2
(![]() ): nad odciętą
): nad odciętą ![]() widzimy charakterystyczny
punkt potrójny.53może komuś przypominają się lekcje fizyki w liceum,
np punkt potrójny wody …
widzimy charakterystyczny
punkt potrójny.53może komuś przypominają się lekcje fizyki w liceum,
np punkt potrójny wody …
Jest to trudniejsze w przypadku portfela krytycznego niemającego
waloru numer 1 (![]() ). Czytelnik widzi na pewno lekki kink
na Rysunku 14.1 na granicy między obszarami niebieskim i czerwonym.
Ma on odciętą
). Czytelnik widzi na pewno lekki kink
na Rysunku 14.1 na granicy między obszarami niebieskim i czerwonym.
Ma on odciętą ![]() i rzędną
i rzędną ![]() .
Taką samą odciętą
.
Taką samą odciętą ![]() ma punkt o rzędnej 1 – wspólny
punkt narożny obszarów: małego zielonego i czerwonego. Oba wymienione
punkty trzeba myślowo skleić ze sobą; dostanie się wtedy drugi punkt
potrójny na diagramie.
ma punkt o rzędnej 1 – wspólny
punkt narożny obszarów: małego zielonego i czerwonego. Oba wymienione
punkty trzeba myślowo skleić ze sobą; dostanie się wtedy drugi punkt
potrójny na diagramie.
Ćwiczenie 14.4
Dokonujemy przesunięcia równoległego wszystkich wartości oczekiwanych o wielkość
![]() ,
, ![]() , nie zmieniając przy tym [odwracalnej] macierzy
kowariancji.
, nie zmieniając przy tym [odwracalnej] macierzy
kowariancji.![]() Znaleźć wzory na nowe wielkości ,,greckie”
Znaleźć wzory na nowe wielkości ,,greckie” ![]() ,
,
![]() i
i ![]() po takim przesunięciu, a następnie
po takim przesunięciu, a następnie![]() sprawdzić, że takie przesunięcie równoległe ma (skądinąd naturalną
i oczekiwaną) własność funktorialności
sprawdzić, że takie przesunięcie równoległe ma (skądinąd naturalną
i oczekiwaną) własność funktorialności
 |
dla wszystkich wartości ![]() . (Taka własność funktorialności przebłyskiwała
kilka razy w ,,przesuniętym przykładzie Krzyżewskiego” dyskutowanym tuż
przed tym ćwiczeniem.)
. (Taka własność funktorialności przebłyskiwała
kilka razy w ,,przesuniętym przykładzie Krzyżewskiego” dyskutowanym tuż
przed tym ćwiczeniem.)
Łamane wierzchołkowe revisited i początek dyskusji algorytmu CLA
Łamane wierzchołkowe – te odpowiedniki w modelach Markowitza prostych krytycznych Blacka – mogą być, jak już wiemy, bardzo skomplikowane. Szukanie portfeli relatywnie minimalnego ryzyka w modelach Markowitza jest żmudne – porównaj algorytm, czyli de facto metodę prób opisaną w Wykładzie X (bazującą na twierdzeniu Karusha-Kuhna-Tuckera). Również podzbiór łamanej wierzchołkowej – łamana efektywna obsługująca granicę efektywną – może być bardzo złożony, jak pokazują przykłady znalezione przez studentów naszego wydziału54P. Grodzki i J. Gruszczyński, patrz też lista osiągnięć studentów podana pod koniec Wykładu VII w roku 2008.
Komentatorzy pracy Markowitza z 1952 czynili mu z tego zarzuty,
określając całą rzecz jako mało praktyczną. Jak bowiem w praktyce
[wtedy, prawie 60 lat temu] znajdywać tak złożone obiekty?
Markowitz odpowiedział artykułem [20] i [pierwszą]
książką [21]. Mianowicie ukonkretnił i wyszlifował
prawdziwy klejnot, tzw. algorytm prostej krytycznej (Critical
Line Algorithm – CLA) zręcznie wyłuskujący te ściany sympleksu,
przez które przebiega łamana efektywna, czy łamana wierzchołkowa,
zależnie od wariantu.
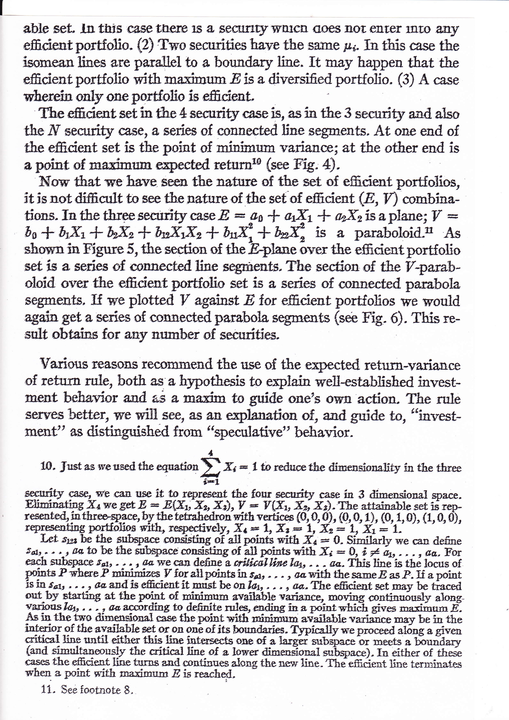
Należy jednak zaznaczyć, że pierwsze, i od razu przełomowe uwagi
na ten temat zawarł on już w [19]! Kluczowa w tym aspekcie
jest tam strona 87. Proszę ocenić samej/samemu, reprodukcja poniżej.
[W wersji pdf Rysunek 14.2 jest dopiero pół strony dalej …]
Natomiast jak po latech oceniał to sam Markowitz? Odpowiedź jest na stronie 38 w jego drugiej książce [22]: `The general portfolio selection model […] was presented in [20], along with the critical line algorithm for computing efficient sets.' Te słowa nie wymagają żadnego dodatkowego komentarza odnośnie pierwszeństwa w odkryciu algorytmu prostej krytycznej w analizie portfelowej.
Przy ilości spółek w modelu ![]() , zamiast ogromnej
ilości ścian do rozważenia, algorytm CLA zwykle wskazuje tych
kilkaset istotnych, na których dzieje się wszystko, co ważne dla
analizy portfelowej i decyzji inwestycyjnych o nią opartych.
, zamiast ogromnej
ilości ścian do rozważenia, algorytm CLA zwykle wskazuje tych
kilkaset istotnych, na których dzieje się wszystko, co ważne dla
analizy portfelowej i decyzji inwestycyjnych o nią opartych.
(W [22] na stronie 157 czytamy: `Fortunately we can
find these few hundred [critical lines], and their efficient
portions, without enumerating all critical lines.')
W naszym opisie algorytmu CLA będziemy stale zakładać,
że ![]() i (5.2). Potem dojdą jeszcze inne
niezbędne założenia. Wszystko polegać będzie na zręcznym,
innym niż do tej pory szukaniu portfeli relatywnie minimalnego
ryzyka
i (5.2). Potem dojdą jeszcze inne
niezbędne założenia. Wszystko polegać będzie na zręcznym,
innym niż do tej pory szukaniu portfeli relatywnie minimalnego
ryzyka ![]() bez eksponowania parametru
bez eksponowania parametru ![]() .
.
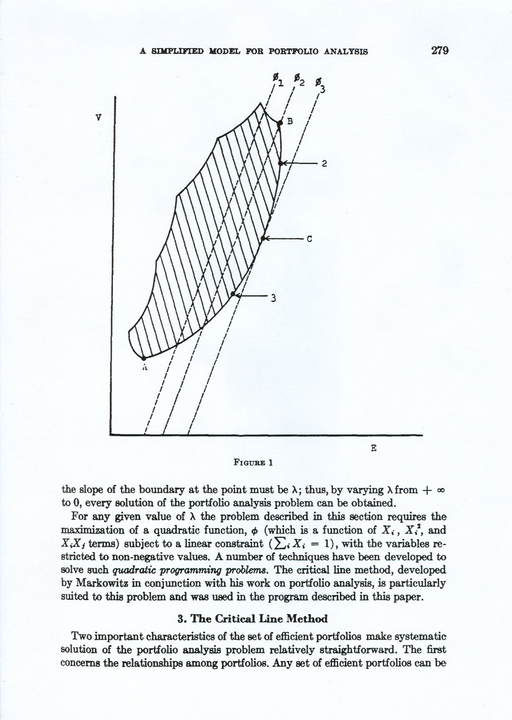
Zanim to ukonkretnimy i rozwiniemy, chcemy jeszcze przywołać słowa Sharpe'a z [26]. Zamiast bardzo długiego w tym przypadku cytatu, oto dwie odpowiednie strony z tamtej pracy. Ich lektura, i to teraz, dosłownie na poczekaniu, może być dla czytelnika pierwszym spotkaniem i pochyleniem się nad algorytmem Markowitza. Wyjaśnienia, które nastąpią później, w tym i w następnym (ostatnim) wykładzie, będą inaczej odbierane, gdy czytelnik będzie coś pamiętał ze wstępnego opisu Sharpe'a.
[W wersji pdf idący teraz Rysunek 14.3 przeskoczył aż na następną stronę, zaś zaraz po nim idący Rysunek 14.4 – na jeszcze następną. Zapoznać się z nimi należy przed zagłębieniem się w konkrety opisu algorytmu.]
Zagłębiamy się już teraz w konkrety opisu algorytmu. Przypuśćmy, że
szukamy takich portfeli na ścianie ![]() ,
,
![]() (wierzchołki sympleksu są teraz dopuszczalne!),
tzn. rozwiązujemy zagadnienie
(wierzchołki sympleksu są teraz dopuszczalne!),
tzn. rozwiązujemy zagadnienie
| (14.15) |
| (14.16) |
przy jakichś rzeczywistych ![]() zależnych
od szukanego
zależnych
od szukanego ![]() . Markowitz doszedł do wniosku, że
. Markowitz doszedł do wniosku, że ![]() należy traktować jako niezależny parametr oraz szukał
pełnego układu
należy traktować jako niezależny parametr oraz szukał
pełnego układu ![]() równań, a nie jedynie
równań, a nie jedynie ![]() równań.
Sztuczne
równań.
Sztuczne ![]() równań wprowadził on w zaskakująco
prosty sposób.
równań wprowadził on w zaskakująco
prosty sposób.
Definicja 14.1
Niech ![]() ,
, ![]() to nowe wektory o
to nowe wektory o ![]() współrzędnych, tożsame z
współrzędnych, tożsame z ![]() na miejscach z IN, lecz zerowe
na miejscach z OUT. Niech
na miejscach z IN, lecz zerowe
na miejscach z OUT. Niech ![]() to macierz
to macierz ![]() ,
której
,
której ![]() -ty wyraz to
-ty wyraz to
![\left\{\begin{array}[]{ll}(i,\, j)\text{-ty wyraz }\Sigma&\hbox{gdy $(i,\, j)\in\text{IN}\times\text{IN}$,}\\
1&\hbox{gdy $i=j\in\text{OUT}$,}\\
0&\hbox{gdy $i\ne j,\ (i,\, j)\notin\text{IN}\times\text{IN}$.}\end{array}\right.](wyklady/pk1/mi/mi1726.png) |
(Proszę porównać te nowe symbole z innymi symbolami
![]() ,
, ![]() ,
, ![]() wprowadzonymi
i używanymi w Wykładzie X.)
wprowadzonymi
i używanymi w Wykładzie X.)
Równania (14.15) zapisujemy teraz jako układ
do którego dołączamy równanie budżetowe ![]() .
Łącznie dostajemy układ
.
Łącznie dostajemy układ ![]() równań z
równań z ![]() ,,niewiadomymi”, wśród
których jest
,,niewiadomymi”, wśród
których jest ![]() wiadomych
wiadomych ![]() :
:
| (14.17) |
W podejściu Markowitza kluczowe są macierze
![]() układów równań (14.17).
układów równań (14.17).
Twierdzenie 14.4
Gdy ![]() oraz (10.3) (tzn. wszystkie liczby
oraz (10.3) (tzn. wszystkie liczby
![]() są różne), wtedy wszystkie
macierze
są różne), wtedy wszystkie
macierze ![]() są odwracalne dla
są odwracalne dla
![]() .
.
Jest to widoczne bezpośrednio dla IN jednoelementowych.
Istotnie, gdy ![]() , wtedy, rozwijając55rozwinięcie
Laplace'a wyznacznik względem
, wtedy, rozwijając55rozwinięcie
Laplace'a wyznacznik względem ![]() -go wiersza, składnik z czynnikiem
-go wiersza, składnik z czynnikiem
![]() znika i zostaje tylko
znika i zostaje tylko
![\det M_{{\text{IN}}}\,=\,(-1)^{{i+k}}\begin{array}[]{|c|c|}\overbrace{\begin{array}[]{ccc}1&&\text{{\Large{0}}}\\
&\ddots&\\
\text{{\Large{0}}}&&1\end{array}}^{{i-1}}&\overbrace{\begin{array}[]{ccccc}&&&&\\
&&\text{{\Huge{0}}}&&\\
&&&&\end{array}}^{{k-i}}\\
\hline\begin{array}[]{ccc}\\
\\
&\text{{\Huge{0}}}&\\
\\
\\
\end{array}&\begin{array}[]{ccccc}0&1&0&\cdots&0\\
\vdots&&1&\text{{\Huge{0}}}&\vdots\\
\vdots&&&\ddots&0\\
0&\text{{\Huge{0}}}&&&1\\
1&0&\cdots&&0\\
\end{array}\end{array}=(-1)^{{i+k}}(-1)^{{k-i+1}}\cdot 1=-1\,,](wyklady/pk1/mi/mi2019.png) |
a więc ten wyznacznik nie zależy nawet od wariancji
![]() .
.
Dla IN więcej niż jednoelementowych potrzeba tu więcej pracy.
Na ścianie IN rozwijamy teorię Blacka przy danych ![]() ,
,
![]() ,
, ![]() – patrz wspomniane starsze
oznaczenia z Wykładu X. (Oczywiście wykorzystujemy tutaj założenia
– patrz wspomniane starsze
oznaczenia z Wykładu X. (Oczywiście wykorzystujemy tutaj założenia
![]() oraz
oraz ![]() , czyli
założenie (10.3), właśnie jeszcze z Wykładu X; jest
to centralny moment dowodu.)
, czyli
założenie (10.3), właśnie jeszcze z Wykładu X; jest
to centralny moment dowodu.)
Niech liczby ![]() pojawiające się w
tej teorii będą teraz nazwane
pojawiające się w
tej teorii będą teraz nazwane ![]() i, konsekwentnie,
i, konsekwentnie,
 |
(14.18) |
Pytamy się, czy układ ![]() równań (14.17) ma rozwiązanie.
W czystym sensie wyjętym z GALu, bez żadnego związku z analizą
portfelową.
To pytanie jest jednak źle postawione – trzeba najpierw
sprecyzować wartość
równań (14.17) ma rozwiązanie.
W czystym sensie wyjętym z GALu, bez żadnego związku z analizą
portfelową.
To pytanie jest jednak źle postawione – trzeba najpierw
sprecyzować wartość ![]() w kolumnie wyrazów wolnych!
Sprecyzujmy więc, biorąc np
w kolumnie wyrazów wolnych!
Sprecyzujmy więc, biorąc np ![]() . Wtedy z (14.18)
dostajemy
. Wtedy z (14.18)
dostajemy ![]() i równocześnie
i równocześnie
![]() . Jaki wektor
. Jaki wektor ![]() mógłby dopełnić
tę wartość
mógłby dopełnić
tę wartość ![]() do rozwiązania w sensie z GALu układu
(14.17)? Oczywiście portfel Blacka
do rozwiązania w sensie z GALu układu
(14.17)? Oczywiście portfel Blacka ![]() – porównaj podstawowy wzór (6.2) –
uzupełniony zerami na miejscach OUT, by dostać portfel
– porównaj podstawowy wzór (6.2) –
uzupełniony zerami na miejscach OUT, by dostać portfel
![]() (!)
(!)
Układ równań po doprecyzowaniu ma więc rozwiązanie.
Przypuśćmy teraz, że istnieją dwa różne rozwiązania,
cały czas w sensie z GALu, tego układu po doprecyzowaniu,
![]() ,
,
![]() .
.
Natura równań (14.17) jest taka, że ![]() leżą w płaszczyźnie
ściany IN:
leżą w płaszczyźnie
ściany IN: ![]() dla
dla ![]() . Wtedy także
. Wtedy także
![]() (bo, wobec
(bo, wobec
równość ![]() pociągałaby
pociągałaby ![]() ). W takiej sytuacji
wspomniana teoria Blacka na ścianie IN ma dwa różne rozwiązania
). W takiej sytuacji
wspomniana teoria Blacka na ścianie IN ma dwa różne rozwiązania
![]() i
i ![]() przy jednej wartości oczekiwanej
przy jednej wartości oczekiwanej ![]() . Dwa różne
portfele relatywnie minimalnego ryzyka w aspekcie B
odpowiadające ustalonej wartości oczekiwanej
. Dwa różne
portfele relatywnie minimalnego ryzyka w aspekcie B
odpowiadające ustalonej wartości oczekiwanej ![]() !
(Punkty
!
(Punkty ![]() ,
, ![]() rozumiane są teraz jako punkty
w przestrzeni
rozumiane są teraz jako punkty
w przestrzeni ![]() -wymiarowej;
-wymiarowej;
![]() jest, przypominamy
to jeszcze raz, istotne.)
jest, przypominamy
to jeszcze raz, istotne.)
Tak, jak dobrze wiadomo, być nie może. Przypuszczenie o dwóch
różnych rozwiązaniach jest więc fałszywe. Skoro układ równań
liniowych (14.17), po doprecyzowaniu ![]() , ma jedno
jedyne rozwiązanie w sensie z GALu, jego macierz
, ma jedno
jedyne rozwiązanie w sensie z GALu, jego macierz ![]() jest nieosobliwa.
jest nieosobliwa.
Korzystamy teraz z Twierdzenia 14.4 i rozwiązujemy
układ (14.17), lecz teraz już przy dowolnej
ustalonej wartości ![]() (takie to added
values oferuje nam za darmo GAL; ktoś inny powie w
tym miejscu, że jest to alfabet matematyki):
(takie to added
values oferuje nam za darmo GAL; ktoś inny powie w
tym miejscu, że jest to alfabet matematyki):
 |
(14.19) |
Tak zdefiniowane ![]() oraz
oraz ![]() są to wektory o
są to wektory o ![]() składowych (!), które będą używane w
każdym danym etapie IN algorytmu CLA. Lecz nie tylko one.
składowych (!), które będą używane w
każdym danym etapie IN algorytmu CLA. Lecz nie tylko one.
Obok nich używane będą jeszcze dwa inne wektory, tym razem o ![]() składowych, bezpośrednio związane z nierównościami (14.16).
składowych, bezpośrednio związane z nierównościami (14.16).
Definicja 14.2
(podstawowy wektor używany podczas stosowania twierdzenia K-KT do poszukiwania portfeli relatywnie minimalnego ryzyka).
Zapisujemy ten wektor ![]() trochę inaczej, używając
rozwinięcia (14.19):
trochę inaczej, używając
rozwinięcia (14.19):
 |
(14.20) |
gdzie ![]() nie jest wynikiem działania macierzy
nie jest wynikiem działania macierzy
![]() na wektorze
na wektorze ![]() , tylko niekwadratową macierzą
, tylko niekwadratową macierzą
![]() .
.
Algorytm CLA to, na każdym etapie IN, dosyć zręczne
żonglowanie rozwinięciami (14.19) i (14.20).
Dla większej przejrzystości, w dalszym ciągu opuszczać będziemy
subskrypty IN w wektorach ![]() . Istnieje ryzyko
kolizji oznaczeń z symbolami w teorii Blacka i współautorów,
lecz zawsze należy zwracać uwagę na kontekst pojawienia się
danego symbolu.
. Istnieje ryzyko
kolizji oznaczeń z symbolami w teorii Blacka i współautorów,
lecz zawsze należy zwracać uwagę na kontekst pojawienia się
danego symbolu.


