5.1. Modele z opóźnieniem
Innym sposobem wprowadzenia pewnej zależności od wieku jest modelowanie przy użyciu równań z opóźnieniem. Wróćmy do opisu dynamiki populacji za pomocą wzoru (2.1) i załóżmy, że przyrost per capita zależy nie od liczebności populacji w bieżącej chwili t, ale od stanu w pewnej chwili w przeszłości t-τ. Kiedy tak się będzie działo? Wyobraźmy sobie populację roślinożerców, które zjadają rośliny będące w pewnym konkretnym wieku τ i jest to jednocześnie wiek, w którym te rośliny rozsiewają nasiona. Jeśli roślina zostanie zjedzona, to nie rozsieje nasion, a wtedy w przyszłości osobniki opisywanej populacji nie mają co jeść. Ilość zjedzonych roślin zależy od stanu populacji w bieżącej chwili, zatem ilość jedzenia w przyszłości, czyli przyrost per capita, zależy od tego stanu. Przy takich założeniach równanie na przyrost per capita przyjmuje postać
W szczególności równanie logistyczne z opóźnieniem zaproponowane przez G. E. Hutchinsona w 1948 r. zapiszemy jako
|
N˙t=rNt1-Nt-τK. |
| (5.1) |
Oczywiste jest, że przy opisanym powyżej modelu heurystycznym powinniśmy rozważać nie dokładnie jedno ustalone opóźnienie τ, ale pewien rozkład opóźnienia, gdyż nie ma w naturze takich roślin, które rozsiewałyby nasiona dokładnie w danym wieku, ale jak zwykle staraliśmy się zbudować jak najprostszy model, zatem przyjęliśmy uproszczenie polegające na ustaleniu opóźnienia τ.
Chcemy zbadać zależność rozwiązań równania (5.1) od wielkości opóźnienia τ>0. Zajmiemy się najpierw omówieniem podstawowych własności, takich jak istnienie, jednoznaczność i nieujemność rozwiązań dla nieujemnego warunku początkowego. Zauważmy, że aby rozwiązać równanie z opóźnieniem τ nie wystarczy, że określimy początkową liczebność populacji N0=N0, ale musimy zadać funkcję początkową określoną na przedziale długości opóźnienia, czyli N0:-τ,0→R+. Typowo w teorii równań różniczkowych z opóźnionym argumentem zakładamy, że funkcja początkowa jest ciągła, ale nie zawsze jest to założenie konieczne. W szczególności — znając funkcję początkową N0 możemy rozwiązać równanie (5.1) metodą kroków, o ile tylko funkcja początkowa jest całkowalna. Dokładniej, niech t∈0,τ. Wtedy
|
N˙tNt=r1-N0t-τK⟹lnNtN00=rt-rK∫-τt-τN0sds, |
|
czyli
|
Nt=N00exprt-rK∫-τt-τN0sdsdlat∈0,τ. |
|
Oznaczmy otrzymane rozwiązanie przez N1t=N00exprt-rK∫-τt-τN0sds dla t∈0,τ. Zauważmy, że jest ono dobrze określone dla ciągłej funkcji początkowej, co więcej w tym przypadku wystarczy, żeby funkcja N0 była całkowalna. Mamy też jednoznaczność, a nieujemność wynika z nierówności N00≥0, przy czym N00=0 implikuje Nt≡0 (stany stacjonarne równań z opóźnieniem są oczywiście takie same jak dla analogicznego równania bez opóźnienia, skoro nie zależą one od czasu). Teraz zastosujemy metodę indukcji matematycznej. Załóżmy, że znamy rozwiązanie Nkt na przedziale k-1τ,kτ i znajdźmy rozwiązanie na kolejnym przedziale
|
Nk+1t=Nkkτexprt-kτ-rK∫k-1τt-τNksdsdlat∈kτ,k+1τ. |
|
Wobec tego metoda indukcji matematycznej gwarantuje, że rozwiązanie istnieje dla dowolnego t≥0 i ma pożądane własności.
Zbadamy teraz własności asymptotyczne rozwiązań, w szczególności stabilność lokalną rozwiązań stacjonarnych. Metoda badania stabilności jest analogiczna, jak stosowana w przypadku równań bez opóźnienia. Przeprowadzamy najpierw linearyzację wokół stanu stacjonarnego. Niech N¯ będzie rozwiązaniem stacjonarnym, czyli N¯=0 albo N¯=K. Wprowadzamy nową zmienną xt, która oznacza odchylenie od stanu stacjonarnego, Nt=N¯+xt, przy czym zakładamy, że xt<ε i pomijamy wyrazy rzędu ε2. Mamy
|
x˙t=rN¯+xt1-N¯+xt-τK≈rxt1-N¯K-rN¯xt-τK |
|
po pominięciu składnika -rxtxt-τK i zauważeniu, że rN¯1-N¯K=0 dla obu stanów stacjonarnych.
Dla stanu stacjonarnego N¯=0 równanie zlinearyzowane ma postać
Widzimy więc, że odchylenie od stanu stacjonarnego xt rośnie, zatem N¯=0 jest niestabilne.
Z kolei dla dodatniego stanu stacjonarnego
Jak zbadać stabilność stanu stacjonarnego x¯=0 powyższego równania? Tak jak w przypadku równań bez opóźnienia szukamy rozwiązań w postaci wykładniczej xt=x0eλt. Jeśli wszystkie wartości własne λ mają części rzeczywiste ujemne, to xt→0 przy t→+∞ dla dostatecznie małych x0. Stąd odchylenie maleje do 0, zatem stan N¯=K równania (5.1) jest lokalnie asymptotycznie stabilny. Jeśli natomiast istnieje wartość własna o części rzeczywistej dodatniej, to N¯=K jest niestabilny. Okazuje się, że dla równań z opóźnieniem równanie charakterystyczne, w tym przypadku
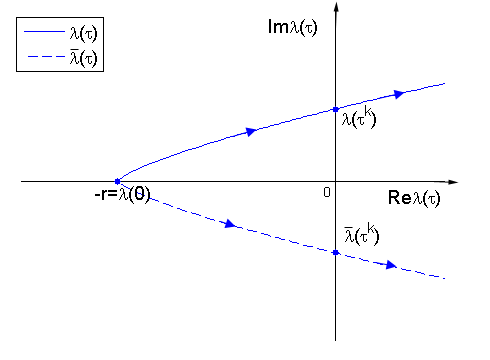
ma nieskończenie wiele rozwiązań, które zależą w sposób ciągły od parametrów, w szczególności od opóźnienia. Skoro dla τ=0 mamy λ=-r<0, to dla małych opóźnień stan N¯=K pozostaje stabilny. Zastanówmy się kiedy może nastąpić destabilizacja. Skoro niestabilność wiąże się z pojawieniem się wartości własnej o dodatniej części rzeczywistej, to dla pewnej krytycznej wartości τk>0 musimy mieć λ=±iω, ω>0, i wartości własne przechodzą z lewej półpłaszczyzny zespolonej na prawą, więc dℜλdττ=τk>0, gdzie ℜλ oznacza część rzeczywistą wartości własnej, por. rys. 5.1.
Jeśli λ=±iω, to
|
±iω=-re∓iωτk⇒iω=re∓iωτk, |
|
ale e∓iωτk=1, więc ωk=r (w ogólnym przypadku łatwiej rozpatrywać tę równość po podniesieniu do kwadratu). Znając krytyczną wartość własną obliczamy τk
|
0=-rcosωkτk,ωk=rsinωkτk, |
|
czyli cosωkτk=0 i sinωkτk=1, wobec tego ωkτk=π2+2nπ, n∈N. Mamy więc ciąg krytycznych wartości własnych τnkn=0∞. Okazuje się, że znak dℜλdττ=τk możemy sprawdzić korzystając z już przeprowadzonych obliczeń.
W ogólnym przypadku dla układu równań z pojedynczym opóźnieniem τ równanie charakterystyczne ma postać
i dla czysto urojonych wartości własnych λ=iω, ω>0,
definiujemy funkcję pomocniczą
której miejsca zerowe wyznaczają czysto urojone wartości własne. U nas Fω=ω2-r2. Podstawiamy y=ω2 i rozpatrujemy F~y=y-r2. Pochodna tej funkcji w punkcie
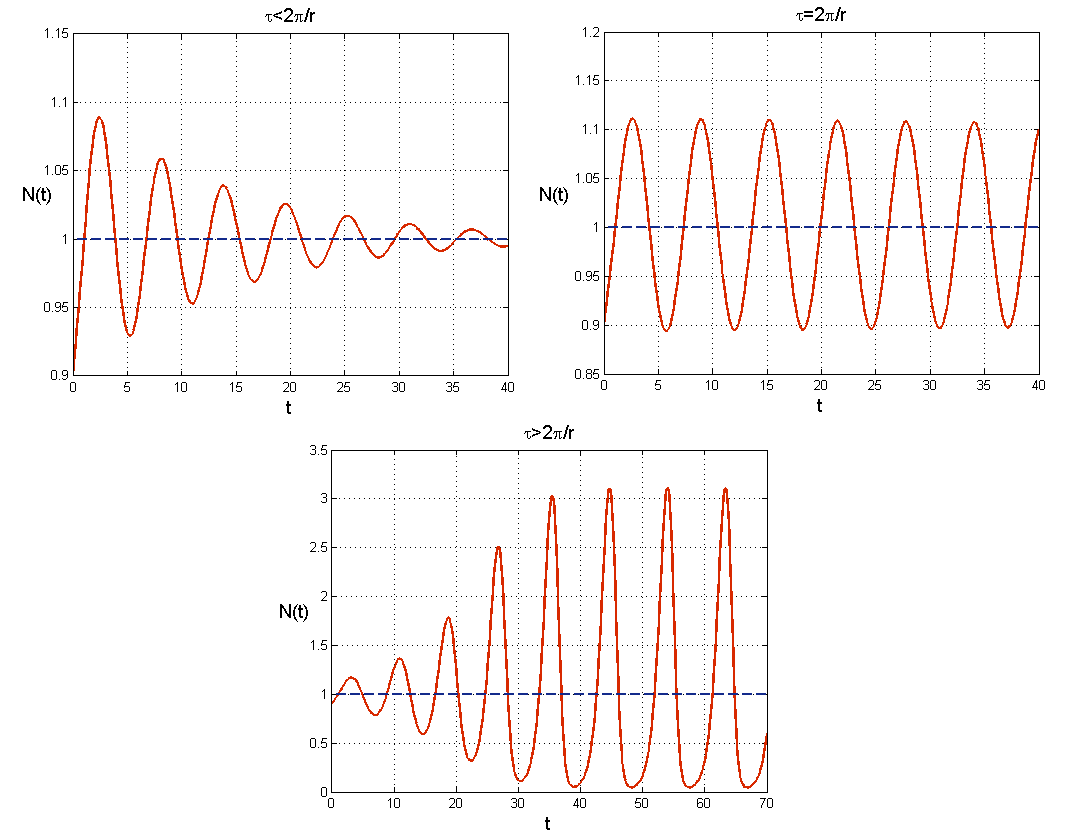
y=ωk2 ma taki sam znak jak dℜλdττ=τk. W naszym przypadku F~′y=1>0, zatem zawsze wartości własne przechodzą z lewej półpłaszczyzny na prawą. Wobec tego dla pierwszej wartości krytycznej τ0k=π2r następuje destabilizacja i rozwiązanie N¯=K pozostaje niestabilne dla wszystkich τ>τ0k. Ten mechanizm destabilizacji nazywamy bifurkacją Hopfa. W jej wyniku pojawiają się nietrywialne rozwiązania okresowe o okresie 2πωk=2πr, co widzimy na wykresach na rys. 5.2.
Podsumowując tę tematykę należy stwierdzić, że wprowadzenie do opisu heurystycznego zależności od wieku prowadzi najczęściej do dynamiki oscylacyjnej, która jest zwykle obserwowana w przypadku populacji występujących w naturze. Widzimy też, że opis dynamiki za pomocą równań z opóźnieniem może przypominać zachowanie rozwiązań modeli dyskretnych, gdzie też obserwujemy oscylacje. Co więcej, jeśli prawa strona równania z opóźnieniem reprezentuje np. funkcję Hilla, to dla odpowiednio dużych wartości współczynnika Hilla występują zachowania chaotyczne, znów analogicznie jak w modelach dyskretnych.
Możemy przypuszczać, że podobieństwa te wiążą się z podobną strukturą obu typów modeli — w modelach dyskretnych tak jak w równaniach z opóźnieniem dynamika w chwili bieżącej t zależy od stanu układu z chwili poprzedniej t-1.