Zagadnienia
1. Równania ruchu
1.1. Wstęp
Mechanika klasyczna, a właściwie jej część zwana dynamiką, zajmuje się opisem ruchu ciał wynikającym z działania na nie sił. Zjawisko to może być obserwowane bez skomplikowanego sprzętu badawczego. Jego model matematyczny mechanika teoretyczna został najwcześniej rozwinięty i stał się podstawą dla innych działów fizyki matematycznej. Wprowadzając ten model, przyjmujemy ustalenia:
-
Przestrzeń fizyczną, będącą terenem naszych rozważań, opiszemy jako
-
Interesujące nas obiekty - ciała materialne - będziemy utożsamiać z pojedynczymi punktami
-
Założymy, że istnieje absolutny czas. Wtedy ruch ciała - punktu materialnego - opiszemy, podając trzy aktualne współrzędne tego punktu. Zatem jego ewolucja to trójka funkcji
-
Rozważanie skończonego układu punktów materialnych (a do takich układów ograniczymy się w tym wykładzie) można zastąpić rozważaniem jednego punktu materialnego w przestrzeni większego wymiaru: rozpatrując układ n punktów w
-
Związek ruchu z wywołującego go siłą jest oparty na ”drugim prawie mechaniki Newtona”. Mówi ono, że w ustalonej chwili iloczyn masy bezwładnej ciała- parametru liczbowego -
(1.1) (1.2) za pomocą wektorowego równania różniczkowego (czyli układu 3 równań skalarnych) o postaci:
Siła
-
Często występuje sytuacja, kiedy swoboda ruchu poszczególnych punktów układu jest poddana ograniczeniom zwanymi umownie więzami. Prowadzi to do sytuacji, kiedy zbiór możliwych położeń układu nie stanowi całej przestrzeni
Dla wyjaśnienia powyższych ustaleń przedstawimy teraz kilka prostych przykładów. Dyskusja sytuacji bardziej skomplikowanych i refleksja nad ich strukturą stanowi przedmiot tego wykładu.
1.2. Przykłady równań ruchu
Zaczniemy od kilku ustaleń dotyczących zapisu:
Ze względu na to, że pochodne szukanych funkcji występują często podniesione do kwadratu lub też w innych kłopotliwych konfiguracjach, wygodnym będzie wprowadzenie innego ich oznaczania, niż zwykle przyjmowane w matematyce. Będziemy mianowicie pisać
| (1.3) |
Przykład 1.1
Spadanie przedmiotów na Ziemię w pobliżu jej powierzchni bez uwzględniania oporu powietrza.
Zgodnie z obserwacjami (Stevin,Galileusz) wszystkie ciała znajdujące się blisko powierzchni Ziemi spadają tak samo, ze stałym przyspieszniem
| (1.4) |
Rozwiązanie równaniania (1.4) nie nastręcza trudności. Otrzymujemy kolejno
| (1.5) |
z których wyznaczamy
Najłatwiej przeprowadzić te rachunki, gdy
Przykład 1.2
Spadanie przedmiotów na Ziemię w pobliżu jej powierzchni z uwzględnieniem oporu powietrza
Zauważmy, że równanie (1.4) możemy otrzymać z II prawa Newtona
| (1.6) |
gdzie
| (1.7) |
gdzie
| (1.8) |
Przykład 1.3
Spadanie z dużej wysokości
Oprzemy się na odkrytej przez Newtona zasadzie powszechnego ciążenia:
dwa ciała o masach grawitacyjnych
| (1.9) |
W rezultacie, ograniczając nasze rozważania do prostej przechodzącej przez środek masy Ziemi i zorientowanej od tego środka, a następnie przyjmując jako zero punkt na osi i na powierzchni Ziemi, otrzymujemy z (1.9) równanie opisujące ruch po naszej osi 'spadanie z dużej wysokości' w postaci:
| (1.10) |
a ponieważ
| (1.11) |
Zestawiając ten wynik z Przykładem 1.1 widzimy, że w tamtej sytuacji przyjęliśmy siłę za stałą i równą
Przykład 1.4
Drgania sprężyste
Wyobrażmy sobie koralik o masie
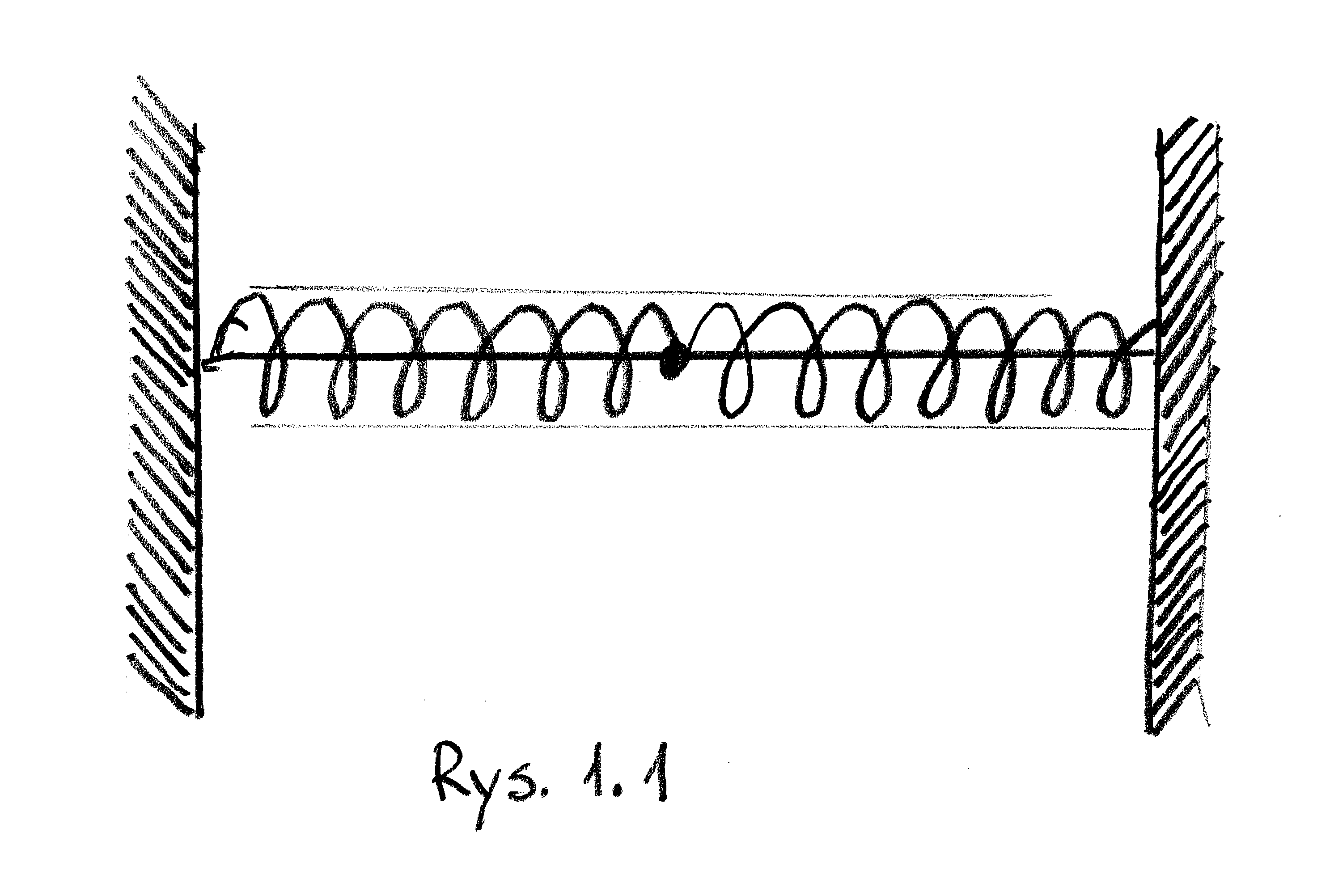
Umieśćmy oś na linii pręta. Wtedy, przyjmując za zero pozycję na środku pręta, o której założymy że jest położeniem równowagi, widzimy, że (zgodnie z prawem Hooka) wychylenie o
| (1.12) |
gdzie
Przykład 1.5
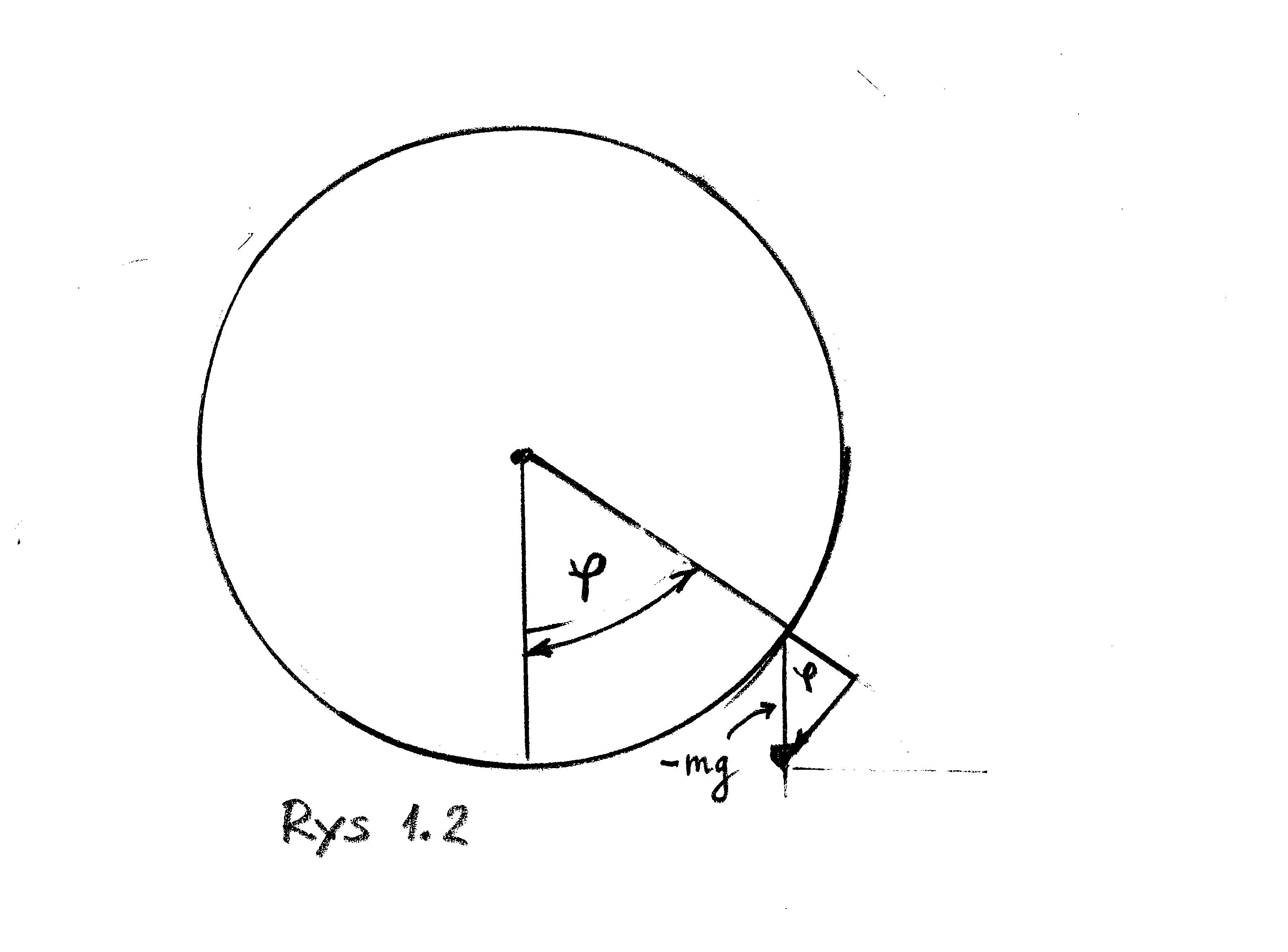
Wahadło płaskie
Rozważmy punkt materialny o masie
Jest to pierwszy z tej serii przykład układu z więzami. Chcąc opisać ten ruch możemy postąpić na dwa sposoby:
-
Do działającej siły dodać siły fikcyjne ”`siły reakcji więzów”', zastępując w ten sposób (dla punktów znajdujących się na rozmaitości) faktycznie działającą siłę jej rzutem na hiperpłaszczyznę styczną do rozmaitośći. (Metodę tę omówimy systematycznie w dalszym kursie wykładu)
-
Drugim sposobem jest lokalne sparametryzowanie rozmaitości i zapisanie składowej stycznej działającej siły jako funkcji parametrów. Postępowanie to w przypadku naszego przykładu objaśnia poniższy rysunek:
Otrzymamy w ten sposób równanie opisujące niejako fikcyjny ruch w fikcyjnym świecie ograniczonym do naszej rozmaitości. Okazuje się, że metoda ta daje identyczny wynik co pierwszy sposób, co niejako ją legitymizuje. W naszym przypadku owo ”wewnętrzne ”równanie ma postać
| (1.13) |
co po uproszczeniu daje
| (1.14) |
Przykład 1.6
Ruch drgający dwuwymiarowy
Za pomocą układu sprężyn, (jak na rysunku poniżej) możemy wykreować sytuację, w której wychyleniu w każdą możliwą stronę od punktu równowagi, towarzysz siła proporcjonalna do wychylenia lecz przeciwnie zorientowana, tzn. ściągająca ciało z powrotem do środka równowagi.
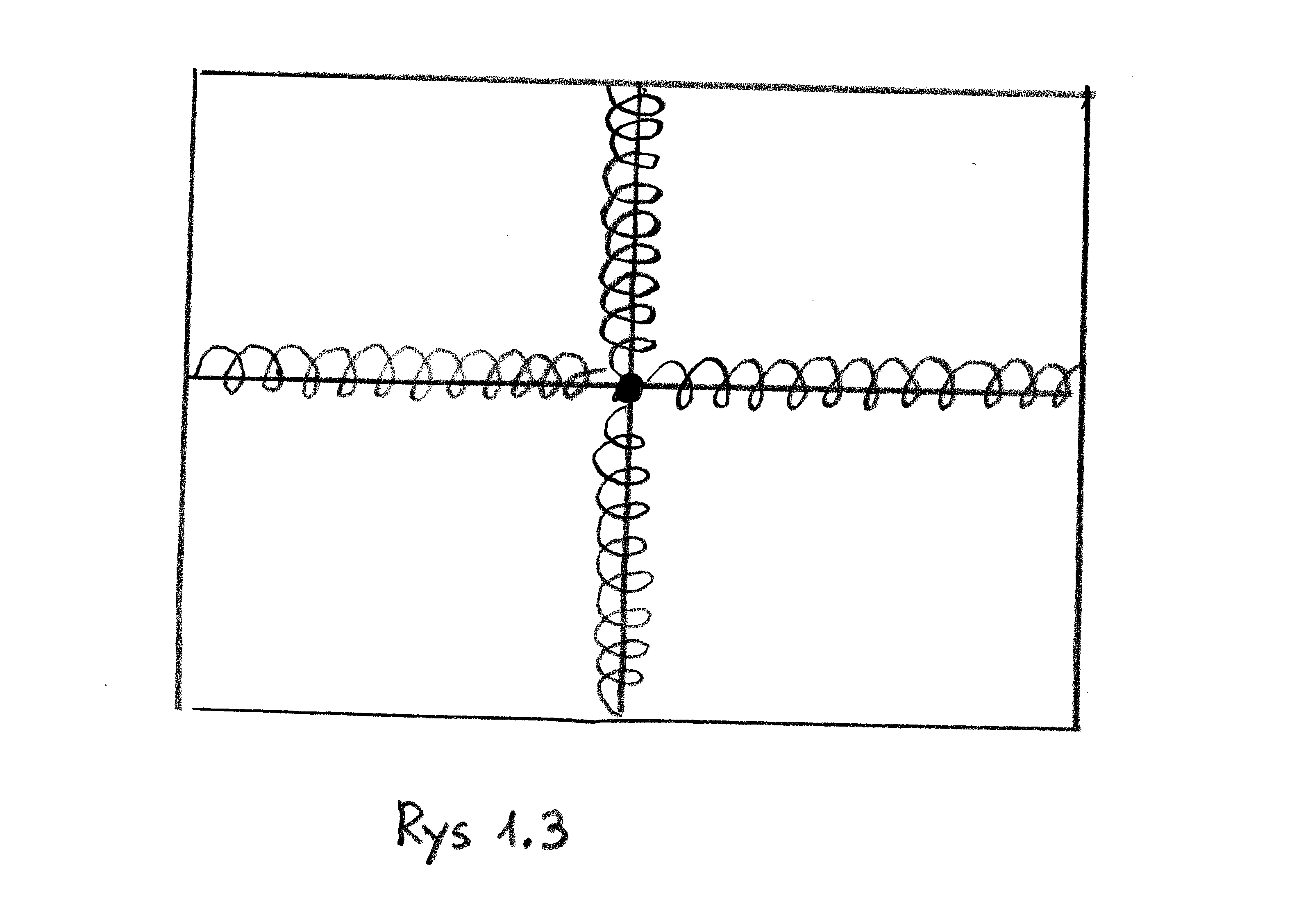
Umieszczając początek układu współrzędnych w punkcie równowagi, otrzymamy dwuwymiarową wersję Przykładu 1.4., gdzie ruch jest opisany równaniem wektorowym:
| (1.15) |
gdzie
| (1.16) |


