Zagadnienia
2. Różne rodzaje sił
Siły, jakie obserwujemy, są kilku rodzajów. Po pierwsze są to siły pochodzące od istot żywych. Ich natura jest skomplikowana i nie będziemy się nimi tutaj zajmować. Drugim rodzajem sił są siły związane z urządzeniami mechanicznymi. Studiowanie ich oraz ich skutków w postaci ruchu mechanizmów jest w oczywisty sposób związane z projektowaniem tych ostatnich. Proste realizacje takich sytuacji występują w Przykładach 1.4 i 1.6 z poprzedniego wykładu. Trzecim rodzajem sił są ”siły przyrody”. Okazuje się, że są one czterech rodzajów, z których dwa: siły grawitacyjne i siły elektromagnetyczne występują w skali makro, natomiast dwa inne rodzaje - tzw. oddziaływania mocne i słabe są właściwie dla świata mikro. Teoria oddziaływań mocnych i słabych należy do zaawansowanych fragmentów fizyki teoretycznej i jest poza obszarem naszych obecnych zainteresowań. Pozostają nam więc oddziaływania grawitacyjne i elektomagnetyczne. Teoria tych ostatnich dotyczy w znacznej mierze obiektów poruszających się z wielkimi prędkościami, gdzie jedno z naszych wstępnych założeń o bezwzględności czasu musi zostać zakwestionowane. Sytuacja ta tłumaczy widoczną w przytoczonych przykładach jednorodność rodzaju występujących sił. Większość z nich to (ewentualnie) przetransformowane, jak w Przykładzie 1.5 siły grawitacyjne.
2.1. Siły zachowawcze
W dyskutowanych poprzednio przykładach wszystkie siły (poza Przykładem 1.2) zależały tylko od położenia i nie zależały od czasu. Niezależność od czasu prawych stron dyskutowanych równań ma liczne implikacje matematyczne. Oto jedna z nich:
Uwaga 2.1
Jeżeli siła
Wynika stąd, że (pomijając mało istotny wpływ pozostałych planet) wraz z ruchem planety po orbicie wokół Słońca, możliwy jest ruch po tej samej orbicie w odwrotnym kierunku, który możemy otrzymać niejako odwracając bieg czasu. Ten ”odwrócony” porządek możemy zrealizować w normalnym świecie, zmieniając np.
warunki początkowe w chwili 0 z
2.2. Siły potencjalne.
W elementarnym kursie fizyki definiuje się pracę
| (2.1) |
gdzie
| (2.2) |
gdzie
Wzór (2.2) jest krokiem wstępnym do określenia pracy
Niech
| (2.3) |
odcinka
| (2.4) |
której każdy składnik jest postaci (2.2). Następnie dla normalnego ciągu podziałów
| (2.5) |
(Ciąg podziałów
Korzystając z różniczkowalności
| (2.6) |
może być tak mała, jak chcemy.
Część druga (odjemnik) powyższej różnicy jest sumą całkową dla funkcji
| (2.7) |
Tak wprowadzona całka mogłaby zależeć od parametryzacji krzywej
Stwierdzenie 2.1
Jeżeli
| (2.8) |
Jeżeli
| (2.9) |
Odpowiedź na poniższe pytanie ma podstawowe znaczenie dla tego wykładu.
Problem 2.1
Dane jest gładkie pole wektorowe
| (2.10) |
O sytuacji opisanej wzorem (2.10) powiemy krótko, że praca pola nie zależy od drogi całkowania. Zanim ustosunkujemy się do Problemu 2.1, rozpatrzmy proste zadanie:
Ćwiczenie 2.1
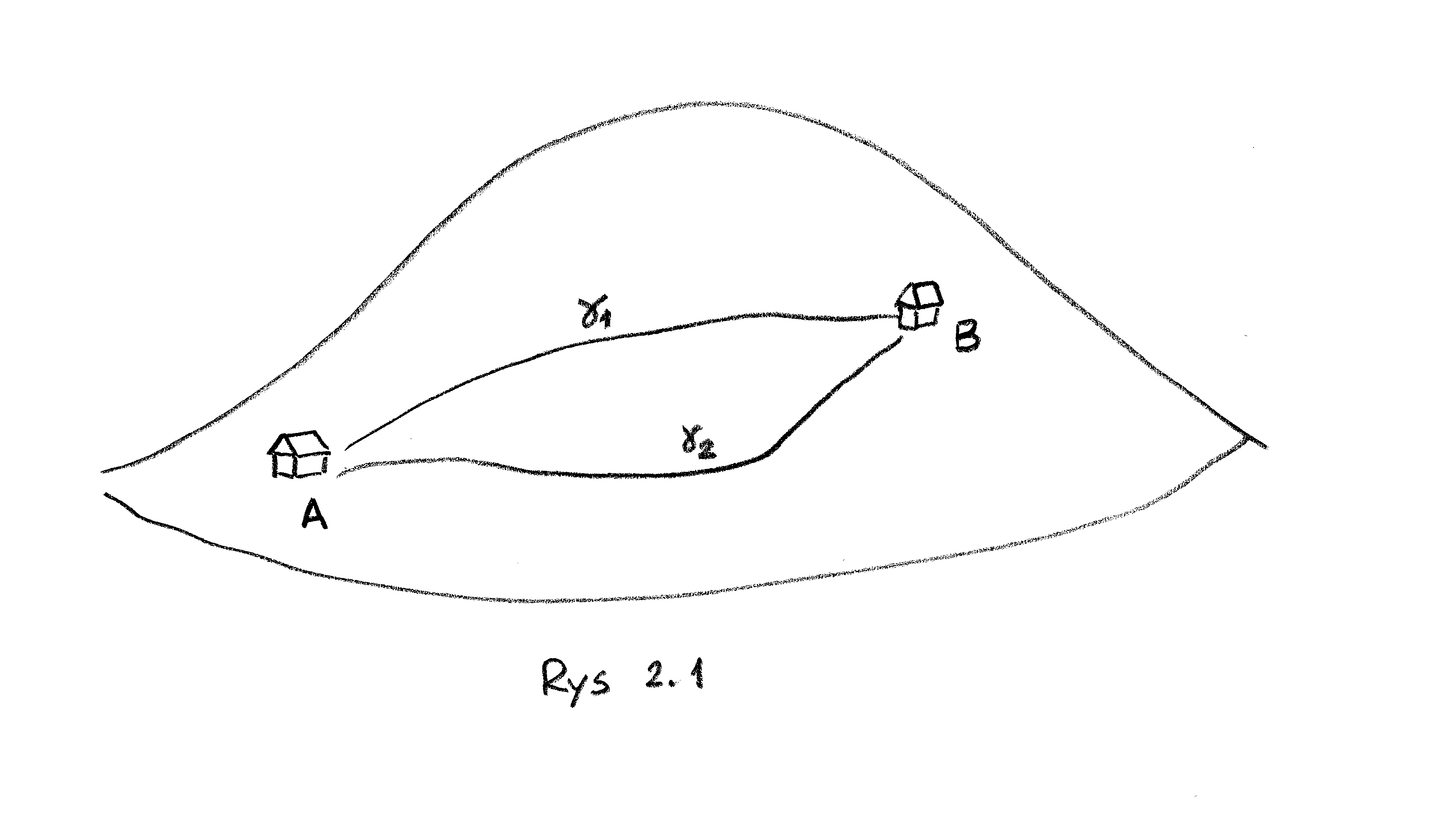
Na zboczu rozległej góry znajdują się dwa domy (zob. rysunek poniżej). Łączą je dwie drogi. Pokazać, że (nie uwzględniając sił tarcia) człowiek ciągnący wózek z ładunkiem z domu A do domu B po każdej z tych dróg wykonuje taką samą pracę, której wielkość zależy tylko od różnicy wysokości położenia domów.
Zacznijmy od uściślenia sformułowań. Posuwając się pod górę pokonujemy opór siły z jaką Ziemia przyciąga wózek a dokładniej opór rzutu tej siły na oś styczną do drogi w jej aktualnym miejscu. Chcemy robić to możliwie ekonomicznie, nie rozpędzając niepotrzebnie wózka (porównaj początek następnego wykładu). W rezultacie, (co jest teoretyczną idealizacją), będziemy zakładać, że siła, którą działamy jest przeciwna do wyżej wymienionego rzutu siły ciężkości. Analogiczne założenie należy przyjąć w tej części drogi, kiedy posuwamy się w dół. Wprowadźmy układ współrzędnych prostokątnych, którego trzecia oś jest skierowana pionowo do góry. Siła, która popycha wózek, kiedy jedzie z góry lub którą trzeba przezwyciężyć, ciągnąc go pod górę, jest składową styczną do drogi siły (0,0 -
gdzie
Możemy teraz podać odpowiedź na postawione pytanie:
Twierdzenie 2.1
Dane jest gładkie pole wektorowe
-
Praca pola
-
Praca pola
-
Istnieje funkcja gładka
(2.11)
.
Uwaga 2.2
Z matematycznego punktu widzenia można oczywiście zamiast poprzedniej formuły, zmieniając
| (2.12) |
Ponieważ (jak w naszym przykładzie), chcemy aby ruch wywołany siłą pochodzącą od potencjału odbywał się w kierunku jego mniejszych wartości, przyjmiemy znak '-' przed gradientem.
(Szkic)
Równoważność
Dowód implikacji
Chcemy pokazać, że dla każdego
Niech
Obierając drogę łączącą
W rezultacie, korzystając z twierdzenia o wartości średniej dla całek, otrzymamy (gdzie
Dowód implikacji
Niech
(Podobnie, jak w zadaniu 2.3)
∎Przykład 2.1
Wskażemy (bez sprawdzania) potencjały odpowiadające siłom dyskutowanym w przykładach 1.1 - 1.6 z poprzedniego wykładu. Wyniki ujmiemy w następującym zestawieniu
| Przykładsiłapotencjał | |
Przykład 2.2
Skończone układy punktów materialnych oddziaływujących wzajemnie siłą grawitacji są potencjalne.
Dla większej przejrzystości przeprowadzimy rozumowanie dla układu trzech punktów o masach
Zgodnie z punktem (4) ze Wstępu w Wykładzie 1 potraktujemy nasz układ jako punkt
jest siłą działającą na
Twierdzimy, że ta siła jest potencjalna w
ma
Zatem
Wynika stąd, że siła


