6.1. Całkowanie równań ruchu
Jak zauważyliśmy w Przykładzie 1.2 siła z jaką Ziemia przyciąga małe obiekty jest w przybliżeniu odwrotnie proporcjonalna do kwadratu ich odległości od środka Ziemi.
Występujący we wzorze iloczyn masy Ziemi i masy przyciąganego przez nią obiektu zastąpimy dodatnim współczynnikiem k. Sytuacja ruchu takiego obiektu w polu grawitacyjnym Ziemi odpowada ruchowi w centralnym polu w R3 z potencjałem
Zgodnie z rozważaniami z poprzedniego wykładu, podczas ruchu ciała o (stałym) momencie pędu M w centralnym polu w R3 odległość r ciała od centrum zmienia się tak, jak w jednowymiarowym ruchu z potencjałem zredukowanym
Wykres tego potencjału ma postać:
Ze Stwierdzenia 5.5 wiemy, że stała energia całkowita wynosi E=mr˙22+Wr a więc
Z (6.1) wynika, że dla jakiegokolwiek ruchu musi być r˙t2≥0, a zatem E≥Wr. Kształt wykresu Wr pokazuje, że ostatni warunek przy E≥0 zachodzi dla r stanowiących półoś rmin,+∞, natomiast E<0 zachodzi dla r z przedziałem rmin,rmax.
Wyprzedzając ilościowy opis, który nastąpi, powiemy, że dla E≥0 mamy do czynienia z sytuacją, kiedy nadlatujący z kosmosu obiekt ma zbyt dużą energię żeby zostać ”uwięziony” w roli satelity, jego tor ulega tylko zakrzywieniu i odlatuje z powrotem w kosmos.
Przypadkowi E<0 odpowiada okresowy ruch po orbicie wokół centrum.
W każdej z dwóch powyższych sytuacji interesują nas jedynie wartości r, przy których zachodzi (6.1), zatem otrzymamy wtedy
przy czym znak ” + ” dotyczy części trajektorii, kiedy r˙≥0 a znak ” - ” ma zastosowanie, kiedy r maleje, czyli obiekt zbliża się do centrum. Jak pokazaliśmy (6.2) daje po rozwiązaniu zależność pomiędzy kątem φ a promieniem r we współrzędnych biegunowych w postaci
|
φ-φ0=±m∫r0rMdrr22E+kr-M22r |
| (6.3) |
Zwróćmy uwagę, że powyższy wzór odpowiada przyjętym dla r i dla φ jednostkomi. Zmieniając je np. tylko dla φ możemy zlikwidować czynnik liczbowy, pojawiający się po prawej stronie równości (6.3).
Oznaczając funkcję pierwotną funkcji podcałkowej w (6.3) przez F możemy też przyjąć φ0=Fr0, co doprowadzi do wzoru φ=±Fr. Aby znależć tę funkcję pierwotną przekształcimy funkcję podcałkową do postaci:
gdzie Br=ddrAr a C jest stałą ujemną.
Ponieważ arccoss′=-11-s2 otrzymamy w rezultacie
Sprowadzimy funkcję podcałkową do postaci jak w (6.4).Zauważmy, że
|
2E+2kr-M2r2=-Mr-kM2+2E+k2M2= |
|
|
=2E+k2M21-Mr-kM2E+k2M22 |
|
zatem przyjmując
otrzymamy
i dla uzyskania (6.4) a więc i (6.5) wystarczy przyjąć C=-2E+k2M2.
W postępowaniu powyższym jest luka polegająca na braku informacji,
że 2E+k2M2≥0, co uniemożliwia napisanie potrzebnych formuł.
Jeżeli E≥0 sprawa jest oczywista. Jeżeli E<0, to z (6.1) wynika, że
a więc 2Er2+2kr-M2≥0.
W przypadku E<0 ostatnia nierówność może zajść jedynie, kiedy wyróżnik △=4k2+8EM2 jest nieujemny, co jest równoważne z warunkiem, że 2E+k2M2≥0.
6.2. Geometryczny opis trajektorii.
Przeskalowując φ możemy uzyskać opis trajektorii ruchu w postaci związku
|
±φ=arccosMr-kM2E+k2M2 |
| (6.6) |
Przekształcając równocześnie licznik i mianownik argumentu funkcji arccos
|
Mr-kM=kMM2kr-1oraz2E-k2M2=kM2EM2k2+1 |
|
i upraszczając, otrzymamy
|
±φ=arccosM2kr-12EM2k2+1 |
| (6.7) |
Uproszczenie kM z kM w przypadku ujemnej wartości kM zmienia znak argumentu arccos. Ponieważ arccos-a=π-arccosa, uzyskujemy (6.7) po następnym przeskalowaniu i zmianie zwrotu na osi φ.
Wprowadźmy oznaczenia
otrzymamy
skąd, z uwagi na parzystość funkcji cos
Zauważmy ( porównaj wyjaśnienie kończące punkt 6.1), że 2EM2k2+1≥0 i dla E>0 otrzymamy e>1 natomiast dla E<0 jest e<1.
Stwierdzenie 6.1
Zbiór punktów płaszczyzny, których współrzędne r,φ spełniają związek (6.10) może być również zdefiniowany następującym warunkiem geometrycznym.
Warunek.
Stosunek odległości punktu od zera do odległości punktu od prostej x=pe (prostą tę nazywamy kierownicą) jest stały i wynosi e.
Dla punktu a na płaszczyźnie jego odległość od zera wynosi r natomiast odległość od kierownicy wynonosi pr-rcosφ, zatem nasz warunek brzmi:
co po łatwych przekształceniach prowadzi do (6.10).
∎
Specjalne położenie krzywej opisanej równaniem (6.10) w stosunku do kartezjańskiego układu współrzędnych, jest związane z dokonanym (implicite) obrotem układu współrzędnych, który nastąpił przy afinicznym przekształcaniu kąta φ wykonanym przy całkowaniu funkcji (6.6).
Dalsza część naszych rozważań dotyczy geometrycznej definicji stożkowych i jest z konieczności nieco szkicowa. Jej celem jest pokazanie w przypadku elips równoważności następującej dalej definicji geometrycznej (6.7), opisu (6.10) i opisu za pomocą równania osiowego dla elips.
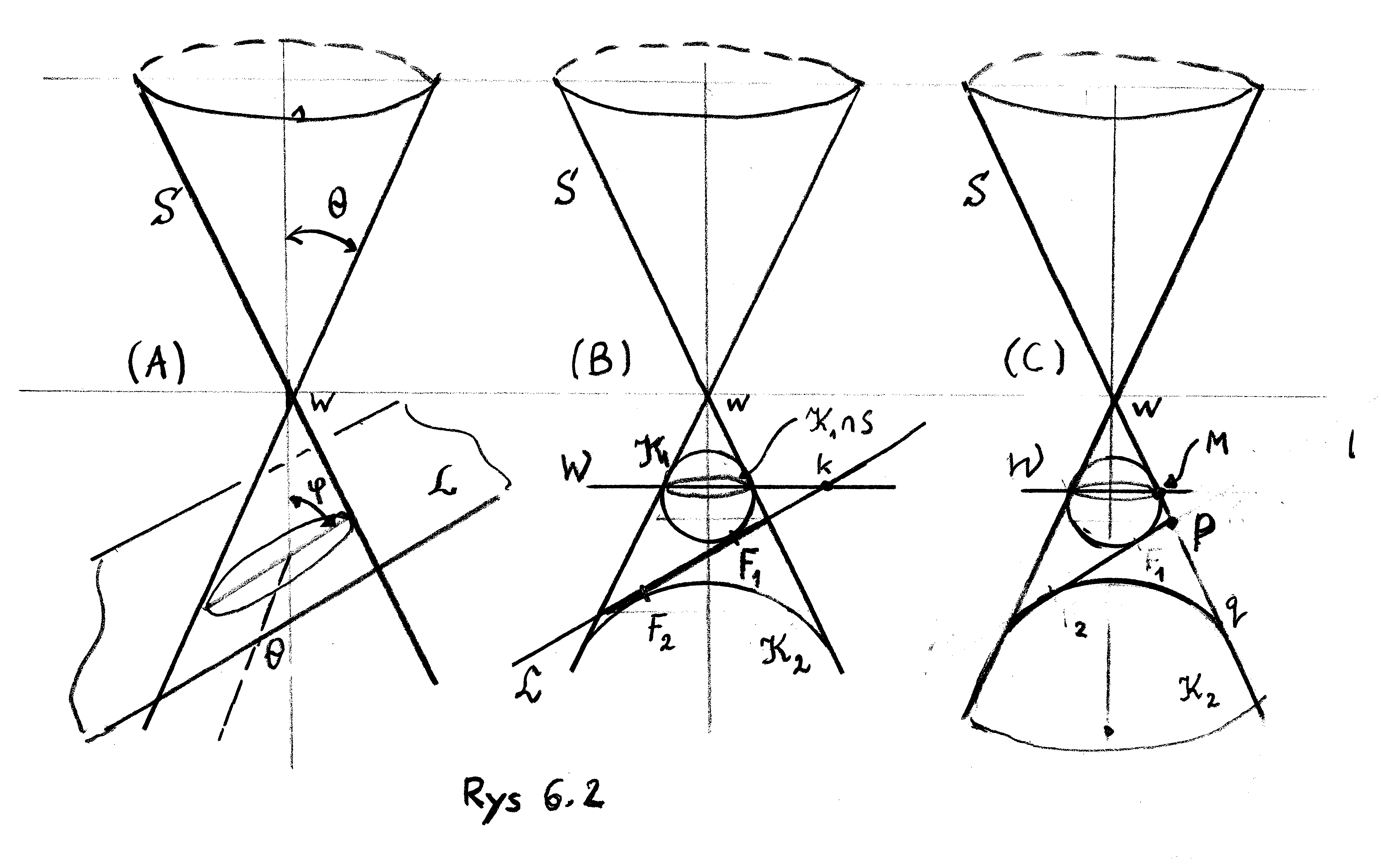
Rozważmy stożek S w przestrzeni R3 z wierzchołkiem W i osią s (zob. rys 6.2 (A).
Przekrójmy stożek S płaszczyzną L. Niech θ będzie połową kąta rozwarcia stożka a φ kątem, jaki tworzy płaszczyzna L z osią stożka s.
Definicja 6.1
Krzywą przecięcia stożka z płaszczyzną nazwiemy
(a) elipsą, jeżeli θ<φ
(b) parabolą, jeżeli θ=φ
(c) hiperbolą, jeżeli θ>φ.
Stwierdzenie 6.2
Niech A=L∩S będzie elipsą w sensie Definicji 6.1, wyznaczoną przez płaszczyznę L. Istnieją na płaszczyźnie L punkt F1 i prosta k takie, że dla dowolnego P∈A zachodzi
gdzie θ i φ są kątami, jak w Definicji 6.1 a ρ (P, k) jest odległością punktu P od prostej k.
Określimy najpierw punkt F1 i prostą k. Niech K1 i K2 będą kulami stycznymi do stożka i do płaszczyzny L (zob. rys. 6.2 (B)). Jako punkt F1 przyjmiemy punkt K1∩L a jako prostą k przecięcie L z płaszczyzną W zawierającą K1∩S i prostopadłą do osi stożka s.
Poprowadźmy płaszczyznę R (płaszczyzna rysunku 6.2(C))przez oś stożka S i dowolny ustalony punkt P, leżący na elipsie L∩S. Niech q będzie tworzącą stożka, przechodzącą przez P i niech M=q∩W. Niech wreszcie D będzie punktem na kierownicy k najbliższym P. Wtedy rzuty prostopadłe odcinków PD i PM na oś stożka są takie same. Istotnie, D i M leżą na płaszczyźnie Ł prostopadłej do osi.
Poza tym PD tworzy z osią s kąt φ a odcinek PM kąt θ a długości odcinków PF1 i PM są równe. Zatem
|
PF1PD=PMPD=acosφacosθ=cosθcosφ. |
|
∎
Stwierdzenie 6.3
Dla danej prostej k i danego punktu F na płaszczyźnie zbiór punktów zdefiniowany warunkiem P:P-FρP,k=e<1 jest izometryczny z elipsą w sensie Definicji 6.1.
(Szkic ).
Prowadząc przez F prostą prostopadłą do k możemy znaleźć na niej punkt Q tak, że
Q-FQ-D=e<1 (D jest przecięciem k z prostą prostopadłą).
Następnie rozpatrując przecięcie stożka płaszczyzną zawierającą oś stożka oraz punkty styczności kul K1 i K2 z L oraz rozpatrując rodzinę płaszczyzn równoległych, dla których cosθcosφ=e , znajdujemy elipsę, o której należy pokazać, że jest izometryczna z naszą elipsą.
∎
6.3. Prawa Keplera
Około 1609 roku J. Kepler sformułował trzy prawa dotyczące ruchu planet wokół Słońca. Podamy ich współczesne sformułowanie.
I. Planety krążą wokół Słońca po elipsach, w których ognisku znajduje się Słońce.
II. W ruchu każdej planety prędkość polowa w płaszczyźnie ruchu pozostaje stała.
III. Dla dowolnych dwóch planet stosunek drugiej potęgi ich okresów obiegu jest równy stosunkowi trzecich potęg długości ich długich półosi.
Prawo pierwsze pokazaliśmy w poprzednim punkcie.
Prawo drugie jest prawdziwe dla dowolnego ruchu w polu centralnym.
Pokażemy, że zachodzi trzecie prawo Keplera.
Dowód trzeciego prawa Keplera.
Nietrudne, lecz kłopotliwe rachunki pozwalają przekonać się, że krzywa opisana w układzie biegunowym równaniem r=p1+ecosφ w układzie kartezjańskim ze środkiem w punkcie -pe1-e2,0 jest przedstawiona równaniem
x2a2+y2b2=1, gdzie a=p1-e2,b=p1-e2 są długościami wielkiej i małej półosi.
Niech T będzie okresem obiegu po takiej eliptycznej orbicie. Ze stałości prędkości polowej St mamy T⋅dSdt=12T⋅M=πab i podstawiając tu wartości na a i b otrzymamy:
Podstawiając tu p=M2k i e=1+2EM2k2 otrzymamy
|
TM=2πM4k2⋅k22EM232=π2Mk2E32=π2⋅Mkk2E32. |
| (6.11) |
Zauważmy teraz, że
|
a=p1-e2=M2k⋅k22EM2=k2E |
|
wobec tego otrzymujemy