Zagadnienia
11. Metoda elementu skończonego - wprowadzenie
W tym rozdziale przedstawimy główne idee metody elementu skończonego na przykładzie modelowego zadania eliptycznego rzędu dwa na obszarze jednowymiarowym. Metoda elementu skończonego jest bardziej ogólna od metody różnic skończonych nawet dla zadań różniczkowych zadanych na obszarze w jednym wymiarze. Np. konstrukcje zadań przybliżonych dla warunków brzegowych różnego typu są dużo prostsze niż w przypadku metody różnic skończonych.
11.1. Metoda elementu skończonego dla modelowego zadania eliptycznego w jednym wymiarze
11.1.1. Słabe sformułowanie
Rozpatrzmy modelowe zadanie jednowymiarowe (7.1) z zerowymi warunkami brzegowymi i
Następnie weźmy dowolną funkcję ciągłą
Oczywiście tutaj
Zamiast zadania (7.1) możemy rozpatrzyć zadanie znalezienia
funkcji
| (11.1) |
Oczywiście rozwiązanie (7.1) spełnia (11.1), a przy odpowiednim doborze
Proszę zauważyć, że podejście wariacyjne jest inne od metody różnic skończonych, w której konstrukcja rozwiązania określonego na zbiorze dyskretnym (siatce) polega na zastąpieniu odpowiednich pochodnych w równaniu różniczkowym odpowiednimi ilorazami różnicowymi na tej siatce.
11.1.2. Element liniowy
Wprowadźmy podział (triangulacje) odcinka
Oczywiście najprostszym podziałem jest podział równomierny, jeśli bierzemy
Zakładamy, że rozpatrujemy rodzinę podziałów z
Teraz na bazie danego podziału
gdzie
Zadanie dyskretne polega na znalezieniu
| (11.2) |
Pozostawimy jako zadanie wykazanie istnienia jednoznacznego rozwiązania (11.2).
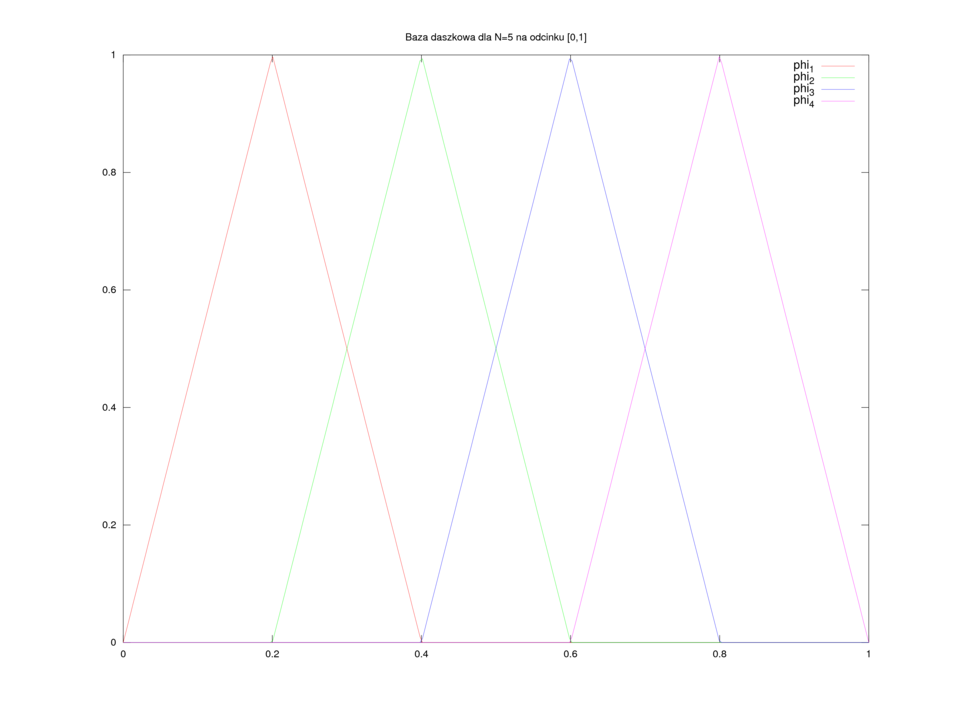
Na razie wprowadźmy tzw. funkcję nodalną: niech
| (11.3) |
Widzimy wykres kilku takich funkcji, por. rysunek 11.1.
Nietrudno pokazać, że
gdzie
| (11.4) |
z
dla
Zauważmy, że macierz
11.1.3. Zbieżność
Zastanówmy się nad zbieżnością
Naturalną normą jest norma energetyczna związana z formą dwuliniową w słabym sformułowaniu (11.1):
Wprowadzając oznaczenie
Następnie dla dowolnego
Korzystając z nierówności Schwarza w
czyli
Przyjmując za
| (11.5) |
dla pewnych stałych
Wtedy od razu otrzymujemy:
czyli dla funkcji klasy
Można też wykazać, że w normie
czyli błąd zachowuje się jako
Porównajmy to oszacowanie z oszacowaniem błędu z metody różnic skończonych (MRS)
na siatce równomiernej dla tego samego zadania różniczkowego.
Można pokazać wtedy zbieżność dyskretną
11.1.4. Inne przestrzenie elementu skończonego
Przestrzeń dyskretną
Dla danego podziału
gdzie
Widzimy, że
| (11.6) |
Zadanie to ma jednoznaczne rozwiązanie. Analogicznie jak dla elementu liniowego
możemy wprowadzić tu tzw. bazę nodalną w
Oczywiście
Dla każdego punktu
| (11.7) |
Można pokazać, że
Powstaje pytanie: po co stosować przestrzenie
Jeśli rozwiązanie
| (11.8) |
i stąd, jak poprzednio dla elementu liniowego, otrzymujemy, że
| (11.9) |
czyli błąd zachowuje się jak
11.2. Zadania
Ćwiczenie 11.1
Pokaż, że
Ćwiczenie 11.2
Wykaż (11.4).
Policz wszystkie różne od zera elementy macierzy
Ćwiczenie 11.3
Pokaż, że macierz
Pokaż, że dla dowolnych funkcji
Ćwiczenie 11.4
Zaproponuj metodę rozwiązywania układu równań (11.4) będącą odpowiednią wersją metody eliminacji Gaussa dla macierzy symetrycznej trójdiagonalnej
dodatnio określonej, której koszt wynosi
Ćwiczenie 11.5 (laboratoryjne)
Dla podziału równomiernego na odcinku
Ćwiczenie 11.6 (częściowo laboratoryjne)
Udowodnij, że plot().
Ćwiczenie 11.7
Korzystając z (11.8) wykaż (11.9) tzn., że
o ile
Dowód przebiega identycznie jak w przypadku
Ćwiczenie 11.8
Udowodnij jednowymiarową nierówność Friedrichsa, a mianowicie, że
jeśli
Ćwiczenie 11.9
Pokaż, że
Ćwiczenie 11.10
Wyprowadź układ równań liniowych
którego rozwiązaniem jest wektor współczynników w bazie
Ćwiczenie 11.11
Udowodnij (11.5).
Oszacowanie dla
Ćwiczenie 11.12
Udowodnij (11.8).


