Zagadnienia
10. Teoria dualności
W tym rozdziale omówimy elementy teorii dualności, tzn. innej charakteryzacji optymalności rozwiązania zadania optymalizacyjnego z ograniczeniami nierównościowymi. Teoria ta odróżnia się od poprzednio opisywanego podejścia Kuhna-Tucker'a tym, że nie wymagamy różniczkowalności funkcji celu
10.1. Warunek dostateczny
Definicja 10.1
Niech
Przykład 10.1
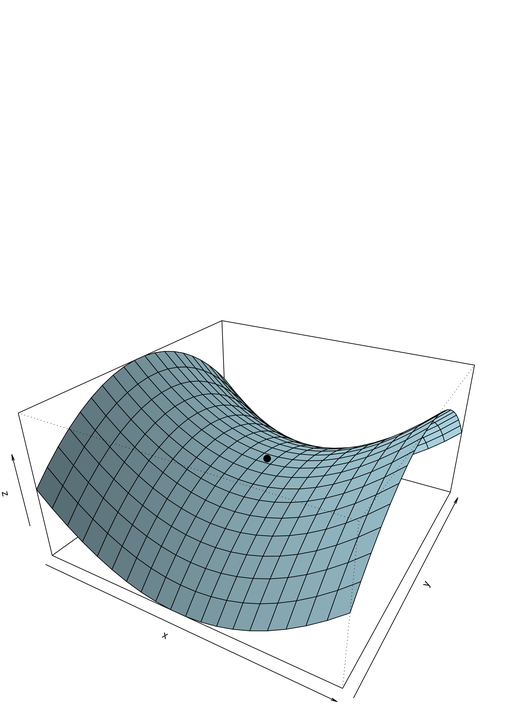
Najprostszym przykładem punktu siodłowego jest ”środek siodła” (patrz rys. 10.1):
Okazuje się, że punkt siodłowy funkcji Lagrange'a jest związany z rozwiązaniem globalnym problemu optymalizacji z ograniczeniami nierównościowymi:
| (10.1) |
Przypomnijmy, że przez
Twierdzenie 10.1
Jeśli
tzn.
to
Dowód
Udowodnimy najpierw, że
Zatem dla każdego
W szczególności, dla
Wiemy, że
Skorzystamy teraz z drugiej nierówności
Z pierwszej części dowodu mamy
Uwaga 10.1
-
W powyższym twierdzeniu nie zakładamy otwartości
-
Zbiór punktów dopuszczalnych
-
Nie ma żadnych warunków regularności.
10.2. Warunek konieczny dla programowania wypukłego
W tym podrozdziale zakładamy, że w problemie (10.1) zbiór
Lemat 10.1
Załóżmy, że zbiór
Dowód
Na mocy twierdzenia 5.2 istnieje wektor mnożników Langrange'a
Uwaga 10.2
Na mocy twierdzenia 7.6 każdy punkt spełniający warunki pierwszego rzędu jest rozwiązaniem globalnym zadania programowania wypukłego. Nie jest zatem ważne, czy wymagać będziemy w powyższym lemacie, aby
Przechodzimy teraz do głównego twierdzenia.
Twierdzenie 10.2
Niech
Ponadto,
Uwaga 10.3
Punkt siodłowy funkcji Langrange'a jest rozpatrywany na różnych przestrzeniach w tw. 10.1 i 10.2. W drugim ze wspomnianych twierdzeń przestrzeń jest większa, gdyż pierwsza zmienna przebiega cały zbiór
Dowód tw. 10.2
Podobnie jak w dowodzie warunku koniecznego pierwszego rzędu, tw. 5.2, główną rolę będzie tutaj odgrywać twierdzenie o oddzielaniu zbiorów wypukłych. Wskaże nam ono wektor mnożników Lagrange'a
Oznaczmy
Zauważmy, że ostatni ze zbiorów jest ”oszukany”: jest on produktem półprostej kończącej się w minimum
Wnioskujemy z nich, że
Przykład 10.2
Przed przystąpieniem do dalszej części dowodu popatrzmy na zbiory
Rozwiązaniem tego zagadnienia jest
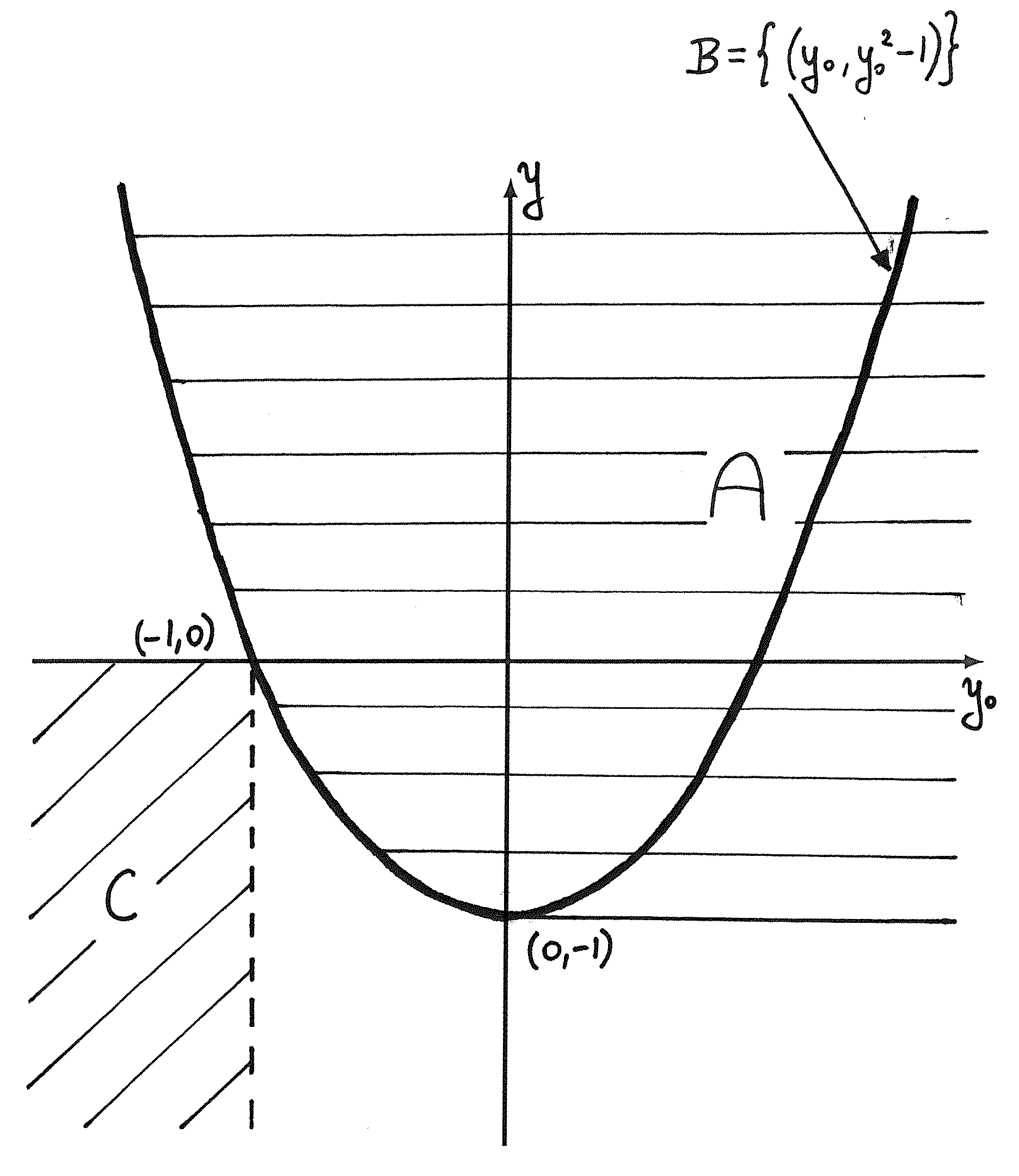
Powróćmy do dowodu. Wypukłość zbioru
Zdefiniujmy
gdzie pierwsza nierówność wynika z powyższych własności
Stąd
dla zdefiniowanego powyżej punktu
Na mocy słabego twierdzenia o oddzielaniu, tw. 3.1, istnieje
Z faktu, że
Zatem dla
W szczególności powyższa nierówność zachodzi dla
| (10.2) |
Wykażemy teraz, że
W szczególności zachodzi to dla punktu
Wiemy zatem, że
Oczywiście
Inaczej,
Pozostaje jeszcze wykazanie drugiej nierówności punktu siodłowego. Biorąc
Dla dowolnego innego
Ta nierówność jest równoważna
10.3. Zadanie pierwotne i dualne
Z teorią puntów siodłowych związane są pojęcia zadania pierwotnego i dualnego. Rozważmy zadanie optymalizacyjne (10.1) i związaną z nim funkcję Lagrange'a
Zauważmy, że
A zatem zadanie (10.1) można zapisać w wydawałoby się prostszej postaci
Niestety powyższe przeformułowanie sprowadza się do rozwiązania oryginalnego zadania, a więc nie zawiera żadnej ,,wartości dodanej”; ale tylko do czasu. Zanim zdradzimy jego zastosowanie, zdefiniujmy kolejną funkcję
Uwaga 10.4
-
Dla dowolnego
-
Jeśli
Powyższe spostrzeżenia kierują nas we właściwą stronę. Będziemy wykorzystywać funkcje
Definicja 10.2
Zadaniem pierwotnym nazywamy problem optymalizacyjny
Zadaniem dualnym do niego jest problem optymalizacyjny
Z własności wspomnianych w uwadze 10.4 wynika, że wartość rozwiązania zadania pierwotnego jest nie mniejsza niż wartość rozwiązania zadania dualnego:
Co więcej, rozwiązanie zadania dualnego daje dolne oszacowanie na wartość funkcji
Lemat 10.2 (Słabe twierdzenie o dualności)
Dla dowolnego punktu dopuszczalnego
A zatem
Dowód
Dowód pozostawiamy jako ćwiczenie.
∎Definicja 10.3
Luką dualności nazwiemy różnicę między wartością rozwiązania zadania pierwotnego i dualnego:
Zapiszmy w języku funkcji pierwotnej i dualnej warunek punktu siodłowego:
Innymi słowy, jeśli funkcja Lagrange'a posiada punkt siodłowy, to luka dualności jest zerowa. Ma to miejsce, na przykład, jeśli spełnione są założenia tw. 10.2.
Możemy teraz zaproponować algorytm rozwiązywania zagadnienia (10.1) przy pomocy metod dualnych.
-
Rozwiąż zadanie dualne. Jego wartość daje dolne ograniczenie na wartość rozwiązania problemu pierwotnego na mocy lematu 10.2.
Wyjaśnijmy warunki punktu drugiego. Z faktu
a zatem
10.4. Zadania
Ćwiczenie 10.1
Udowodnij, że jeśli w problemie optymalizacyjnym (10.1) funkcje
Ćwiczenie 10.2
Uzasadnij, że
Ćwiczenie 10.3
Uzasadnij nierówność:
Ćwiczenie 10.4
Udowodnij, że jeśli
Ćwiczenie 10.5
Udowodnij lemat 10.2.
Ćwiczenie 10.6
Wykaż, że funkcja dualna
Ćwiczenie 10.7
Podaj przykład problemu optymalizacyjnego, dla którego luka dualności jest dodatnia.
Ćwiczenie 10.8
Rozwiąż metodą dualną zadanie
gdzie
Ćwiczenie 10.9
Rozwiąż metodą dualną zadanie
gdzie
Rozważ zbiór
Ćwiczenie 10.10
Znajdź zadanie dualne (czyli formę zadania
gdzie
Ćwiczenie 10.11
Znajdź zadanie dualne do zadania programowania kwadratowego
gdzie
Definicja 10.4
Niech
Ćwiczenie 10.12
Rozważmy problem optymalizacyjny:
gdzie
Rozbij ograniczenie równościowe na dwa ograniczenia nierównościowe.
Ćwiczenie 10.13
Znajdź transformatę Legendre'a-Fenchela następujących funkcji:
Ćwiczenie 10.14
Udowodnij, że transformata Legendre'a-Fenchela
Ćwiczenie 10.15
Wykaż równoważność następujących dwóch zadań optymalizacyjnych:
oraz
| (10.3) |
gdzie przez


