12. Metody numeryczne. Optymalizacja bez ograniczeń
W poprzednich rozdziałach budowaliśmy teorię służącą rozwiązywaniu problemów optymalizacyjnych. By być bardziej precyzyjnym, dowiedliśmy twierdzeń, które ułatwiają znalezienie kandydatów na rozwiązania oraz stwierdzenie, czy któryś z nich jest rozwiązaniem. Niestety w obu tych krokach musimy rozwiązywać układy równań nieliniowych. W praktycznych zadaniach optymalizacyjnych układy te mogą nie mieć ”ładnych” rozwiązań lub po prostu nie jesteśmy w stanie ich znaleźć w sposób analityczny. Pozostaje wówczas zastosowanie metod numerycznych, które pozwolą na przybliżenie rozwiązania. W tym i kolejnych rozdziałach opiszemy kilka takich algorytmów numerycznych. Algorytmy te będą raczej atakowały problem optymalizacyjny bezpośrednio (tzn. nie będziemy się starali znaleźć zbioru punktów spełniających warunek konieczny pierwszego rzędu). Będą one krok po kroku tworzyły ciąg punktów zbiegający do rozwiązania. Nie oznacza to jednak, że mnożniki Lagrange'a i metody dualne są nieprzydatne przy tworzeniu algorytmów numerycznych. Wręcz przeciwnie. W przypadku ograniczeń równościowych klasyczne podejście wiedzie właśnie poprzez mnożniki Lagrange'a (tzw. metoda mnożników Lagrange'a), patrz monografie Bazaraa, Sherali, Shetty [3] oraz Bertsekas [4, 5]. My jednak pójdziemy inną drogą, gdyż możemy poświęcić optymalizacji z ograniczeniami zaledwie jeden rozdział.
Na kolejnych stronach będziemy opisywać algorytmy optymalizacyjne oraz analizować ich działanie. Ta analiza powinna zawierać następujące punkty:
-
zbieżność do rozwiązania (poprawność algorytmu),
-
warunek końca (kiedy możemy przerwać wykonywanie programu, ponieważ znaleziony punkt jest dostatecznie blisko rozwiązania),
-
szybkość zbieżności do rozwiązania.
W tym rozdziale opiszemy metody optymalizacyjne na prostej. Będą one konieczne do zaimplementowania algorytmów optymalizacyjnych w wyższym wymiarze, którymi zajmiemy się w roz. 13. Zadania z ograniczeniami rozważymy w roz. 14.
12.1. Optymalizacja bez użycia pochodnych
Zanim przejdziemy do dyskusji właściwego algorytmu, wprowadzimy pojęcie funkcji ściśle quasi-wypukłej i jej własności.
Definicja 12.1
Niech
Dowód poniższych własności funkcji quasi-wypukłych pozostawiamy jako ćwiczenie.
Lemat 12.1
-
Funkcja quasi-wypukła ma co najwyżej jedno minimum (lokalne i globalne).
-
Funkcja ściśle wypukła jest ściśle quasi-wypukła.
-
Funkcja określona na prostej lub otwartym przedziale jest ściśle quasi-wypukła jeśli jest ściśle malejąca, ściśle rosnąca lub istnieje punkt
Okazuje się, że własność ścisłej quasi-wypukłości pozwala na skonstruowanie algorytmu znajdowania minimum funkcji na domkniętym odcinku bez wykorzystania pochodnych. Główna obserwacja znajduje się w poniższym lemacie:
Lemat 12.2
Niech
-
Jeśli
-
Jeśli
Dowód
Udowodnimy punkt (1) przez sprzeczność. Przypuśćmy, że istnieje
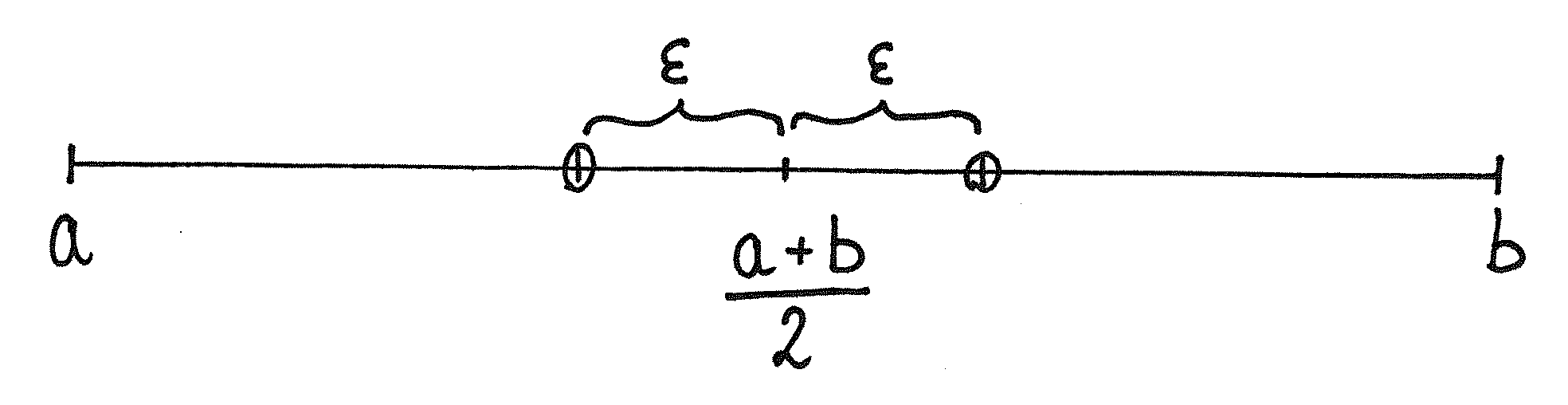
Idea algorytmu jest bardzo prosta. Szukając minimum funkcji ściśle quasi-wypukłej
Algorytm wygląda następująco:
-
Inicjalizacja: Wybierz
-
Krok
-
Jeśli
-
W przeciwnym przypadku
-
-
-
Koniec: gdy różnica
Załóżmy, że istnieje minimum
Jeśli zatrzymamy się w kroku
W zadaniu 12.3 pokażemy, że długość przedziału
Pamiętając, że rozwiązanie
12.2. Metoda Newtona
Metoda Newtona służy do znajdowania zer funkcji różniczkowalnej. Stosując ją do funkcji
Dla przypomnienia wyprowadzimy metodę Newtona dla znajdowania minimum funkcji. Załóżmy, że funkcja
Zamiast minimalizować funkcję
Zauważmy, że jeśli w punkcie
-
Inicjalizacja: Wybierz punkt początkowy
-
Krok
-
Koniec: gdy
Powyższy algorytm niesie ze sobą wiele wątpliwości. Po pierwsze, nie jest wcale jasne, czy ciąg
Lemat 12.3
Załóżmy, że
Dowód
Z ciągłości
| (12.1) |
Załóżmy, że
gdzie w ostatniej równości skorzystaliśmy z równości
gdzie
Wniosek 12.1
Przy założeniach powyższego lematu, jeśli
Drugą bolączką metody Newtona jest to, iż zbiega ona do punktu krytycznego, który może również wyznaczać maksimum lokalne lub punkt przegięcia. Założenie pseudowypukłości funkcji
Pozostaje jeszcze pytanie o warunek końca. Poniższy lemat podaje jego uzasadnienie.
Lemat 12.4
Niech
Wówczas dla każdego
Dowód
Ustalmy
gdzie
Obkładamy obydwie strony modułem i dzielimy przez
Przypomnijmy, że druga pochodna
Drugą nierówność lematu uzyskujemy znów ze wzoru Taylora:
gdzie ostatnia nierówność wynika z tego, że
Zwróćmy uwagę, że wszystkie matematyczne wyniki dla metody Newtona zakładają dodatniość drugiej pochodnej, a zatem ścisłą wypukłość. W pozostałych przypadkach ocena wyników i dobór parametrów
12.3. Zadania
Ćwiczenie 12.1
Udowodnij lemat 12.1
Ćwiczenie 12.2
Znajdź przykład funkcji ściśle quasi-wypukłej określonej na przedziale domkniętym, która nie przyjmuje swojego infimum, czyli zadanie minimalizacyjne nie ma rozwiązania.
Ćwiczenie 12.3
Wykaż, że w metodzie optymalizacji bez użycia pochodnych długość przedziału
Ćwiczenie 12.4
Podaj przykład funkcji
Rozważ funkcję malejącą przy
Ćwiczenie 12.5
Udowodnij, że teza lematu 12.3 może zostać wzmocniona bez zmiany założeń:
Przeprowadź dowód bez użycia oszacowania na
Ćwiczenie 12.6
Opracuj szybki algorytm minimalizowania funkcji wypukłej


