15. Wykład XV, 22.I.2010
Przystępujemy do opisu działania CLA; komentarze objaśniające będą
podane później, by nie zaciemniać głównej, pięknej pętli algorytmu.
Zakładamy już do końca, że Σ>0 oraz
≠μ1,μ2,…,μk. To pociąga, że
macierze ΣIN, a także MIN, są odwracalne
dla wszystkich ∅≠IN⊂1, 2,…,k
– patrz Twierdzenie w Wykładzie XIV.
Algorytm CLA odnajduje, na nowo i niezależnie od metody prób opartej
na twierdzeniu Karusha-Kuhna-Tuckera (patrz Wykład X), łamaną wierzchołkową
Ł¯ zbudowaną z portfeli relatywnie minimalnego ryzyka.
Względnie– w oryginalnej prezentacji Markowitza w [22] –
tylko łamaną efektywną, co jest różnicą mało istotną z punktu widzenia
metodologii CLA. Najczęściej sprawnie i bezbłędnie odnajduje on tych
,,kilkaset boków” Ł¯, jak wyraża się Markowitz,
spośród setek tysięcy czy milionów ścian sympleksu, przez które à
priori mogłaby przebiegać Ł¯. Redukuje problem o
potencjalnej złożoności wykładniczej od k do problemu w praktyce
wielomianowego od k, i to wielomianowego – wydaje się, jest to
otwarte pole do badań – bardzo niskiego stopnia.
Skoncentrujmy uwagę na jednej ustalonej ścianie IN,
w której leży jeden z boków Ł¯.
W tym obecnym spojrzeniu może to nawet być jeden z wierzchołków
sympleksu Δk, oczywiście taki, przez który przechodzi
Ł¯. Tzn. #IN=1 jest możliwe.
Zakładamy, że algorytm już doszedł do boku Ł¯
leżącego w IN i biegnie po nim (lub stoi, gdy #(IN)=1),
zmniejszając przy tym wartość parametru λE.
Jak długo to się dzieje, tzn. jak długo utrzymuje się relatywna
optymalność portfeli – punktów na tym boku? Oczywiście, z
twierdzenia K-KT, dopóki
oraz
|
ηj=γj+δjλE≥0dlaj∈OUT. |
|
Dodatniość, względnie nieujemność, może przy zmniejszaniu
λE popsuć się tylko w tych wyrażeniach, w których
współczynniki przy λE są dodatnie.
Wynikają stąd naturalne dolne ograniczenia
|
λE>-αiβidlai∈IN,βi>0 |
|
oraz
|
λE≥-γjδjdlaj∈OUT,δj>0. |
|
Kresem dolnym optymalności portfeli na ścianie IN, wyrażonym
w terminach parametru λE, jest zatem
|
λlowIN=defmaxβi>0δj>0-αiβi,-γjδj, |
| (15.1) |
gdzie też oczywiście i∈IN, j∈OUT. Gdy
#IN=1, IN=i, wtedy nie ma aktywnej
nierówności na temat xi, są tylko pewne nierówności na temat
ηj, j≠i, związane z optymalnością wierzchołka numer
i oraz związanymi z tym możliwymi wartościami parametru
λE.
Algorytm będzie ,,wiedział”, gdzie skierować się dalej (gdzie
leży następny bok łamanej Ł¯) gdy zawsze tylko
jedna liczba z tych wymienionych po prawej stronie równości (15.1)
realizuje dane maksimum. W celu zapewnienia skuteczności algorytmu CLA
będziemy to zakładali do końca wykładu. Dokładniej,
Definicja 15.1
O modelu Markowitza Σ,μ, Σ>0,
≠μ1,μ2,…,μk, mówimy, że ma
niezdegenerowane parametry gdy
|
≠(αiβi,γjδj|i∈IN,j∈OUT,βi>0,δj>0)∀∅≠IN⊂{1, 2,…,k}. |
| (15.2) |
Komentarz po definicji: zakładając w dalszym ciągu
niezdegenerowanie parametrów modelu, zakładamy w tym wykładzie więcej,
niż jest potrzebne do sprawnego przebiegu algorytmu (choć i tak mniej,
niż u Markowitza w [22]). Bo przecież nie wszystkie ściany IN
muszą być odwiedzone przez konkretną łamaną Ł¯ oraz,
dla jakiegokolwiek danego IN, który występuje w konkretnym
przebiegu algorytmu, nie wszystkie ułamki wymienione w (15.2)
muszą być różne! Tylko największy z nich musi być różny
od wszystkich pozostałych.
Uwaga 15.1
Gdy patrzymy na formułę (15.1), czy też na dualną formułę (15.22),
która pojawi się [dopiero] pod koniec tego wykładu, nie sposób nie zauważyć
ich dużego podobieństwa z formułami, jakie występują w programowaniu
liniowym. Można przykładowo spojrzeć na wzory na stronie 126 w klasycznej
książce [7] poświęconej programowaniu liniowemu, czy też na
towarzyszącą im dyskusję na stronach sąsiednich tamże.
W istocie to, czym od strony technicznej zajmuje się analiza portfelowa,
to programowanie kwadratowe, oczywiście ze specyficznymi
ograniczeniami ,,portfelowymi”. Ekstremalizacja funkcji wypukłej
bądź wklęsłej (bądź też, jak w Wykładzie XIV, pseudo-wklęsłej),
a więc zasadniczo twierdzenie K-KT, nierówności opisujące wypukłą
dziedzinę takiej funkcji i równocześnie pochodne nierówności typu K-KT
wiążące się z ekstremalizacją tej funkcji – stąd biorą się dwie
rodziny ułamków, w których teraz łącznie szukamy liczby najmniejszej
bądź największej. O tyle programowanie
kwadratowe jest bogatsze od liniowego. Przypominamy jeszcze raz tytuł
przełomowej pracy [14]: nonlinear programming.
Warto też jeszcze rzucić okiem na sam tytuł książki [17],
albo też przewertować ją dokładniej.
W książce Gassa jedna rodzina ułamków jest poddawana ekstremalizacji
w każdym kroku algorytmu sympleks, zaś teraz są temu
poddawane równocześnie dwie rodziny różnego pochodzenia.
Opis algorytmu CLA dla modeli z niezdegenerowanymi parametrami
A. Zaczynamy od IN=i, gdzie μi=max1≤l≤kμl=Emax, tzn. od
wierzchołka ei, w którym zaczyna się łamana wierzchołkowa
Ł¯. Algorytm przez długi czas stoi na tym wierzchołku,
podczas gdy parametr λE maleje od +∞ do wartości
λlowi.
Ta wartość progowa, na mocy niezdegenerowania parametrów modelu, jest
równa -γjδj dla jednego jedynego j≠i,
δj>0. Stąd wiemy, że następnym etapem będzie
IN′=IN∪j=i,j, w którym
parametr λE będzie się zmniejszał poniżej wartości
λlowIN.
B. Załóżmy, że już trwa jakiś etap IN w algorytmie, zaś λE
zmniejsza się poniżej poznanej już poprzedniej wartości progowej.
Afiniczne od λE wzory na xi, i∈IN, opisują
bok Ł¯ na ścianie IN, dla λE poniżej poprzedniej
wartości progowej aż do wartości λlowIN
danej wzorem (15.1).
Na mocy niezdegenerowania parametrów modelu, w (15.1)
jest jeden jedyny indeks i∈IN lub j∈OUT
taki, że λlowIN=-αiβi
lub λlowIN=-γjδj.
Następny etap algorytmu to IN′=IN\i
w pierwszym przypadku, względnie IN′=IN∪j w
drugim, przy czym parametr λE zmniejsza się w nim poniżej
λlowIN (do jakiejś wartości lub do -∞).
W ten sposób rekurencyjnie podany jest już cały algorytm,
opisujący bok po boku całą łamaną wierzchołkową Ł¯.
Ostatni etap to, oczywiście, IN=i,
μi=min1≤l≤kμl=Emin,
zaś λE zmniejsza się w nim od poprzedniej wartości progowej
do -∞ (przyjmujemy, że maksimum pustego zbioru liczb wynosi
-∞).
Komentarz po opisie algorytmu. Stosując algorytm CLA,
rekurencyjnie wędrujemy po niektórych ścianach sympleksu Δk,
włączając w to niektóre wierzchołki, cały czas ściśle kontrolując
malejącą ewolucję wiodącego parametru λE. Po drodze
uzyskujemy parametryczne opisy boków łamanej wierzchołkowej
Ł¯ wraz z progowymi wartościami parametru λE
odpowiadającymi wierzchołkom spójnej łamanej Ł¯.
Algorytm jest wydajny w 100% – wędrujemy w nim dokładnie po tych
ścianach Δk, przez które przebiega łamana Ł¯.
Czasami zdarza się – o czym Markowitz w [22] wydaje się
nie wiedzieć – że ten maksymalnie wydajny algorytm musi odwiedzić
wszystkie 2k-1 niepuste ściany Δk.
Tak właśnie dzieje się w przykładzie Więcha omówionym w Wykładzie X,
i też w przykładzie Iwanickiego w wymiarze 5 omawianym tutaj poniżej
(czy też w, tylko wzmiankowanym pod koniec Wykładu VII, nie–praw–do–po–dob–nym
przykładzie Iwanickiego w wymiarze 6).
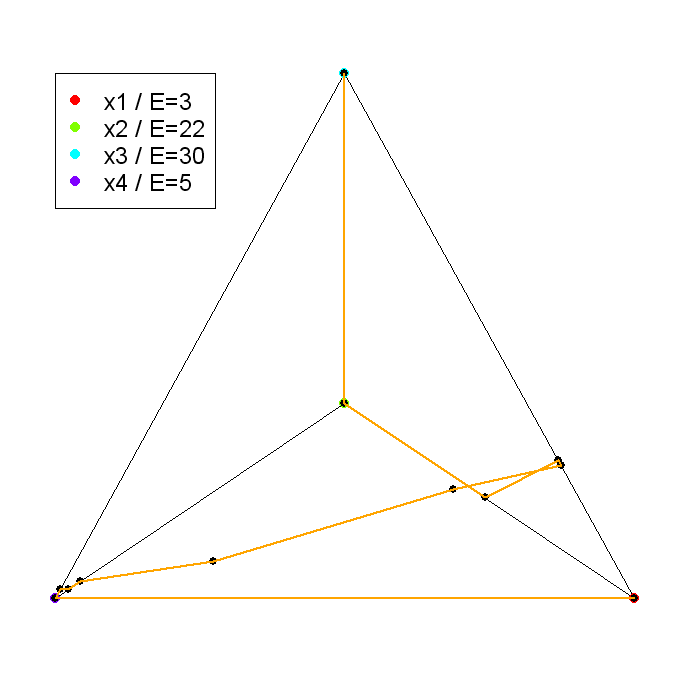
Przykład 15.1 (Więch [29], kontynuacja)
Odnajdywanie łamanej Ł¯ zaczynamy
od IN=3, bo μ3=30=Emax.
λlow3=15532,
wchodzi indeks 2, IN′=2,3. Kolejne
λlow2,3=16764,
wychodzi indeks 3, IN′′=2. Kolejne
λlow2=198, wchodzi indeks
1, itd. Z tabeli w Wykładzie X odczytujemy, jadąc od dołu
do góry, kolejne etapy. Po 1, 2 etap 1, 2, 3,
następnie 1,3→1,3,4→1,2,3,4→1,2,4→2,4→2,3,4→3,4→4→1,4→1.
Odpowiednie wartości progowe λlow są w
środkowej kolumnie tamtej tabeli, też jadąc od dołu do góry:
λlow1,2=53419392, itd.
Istotnie zatem, łamana Ł¯ w przykładzie
Więcha odwiedza wszystkie podzbiory zbioru 1, 2, 3, 4
poza pustym. Ten przykład w chwili pojawienia się jesienią 2001
stanowił prawdziwą sensację.
A oto jak łamana wierzchołkowa w przykładzie Więcha wygląda w
rzucie na płaszczyznę ekranu bądź rysunku, przy odpowiednim
wyborze kierunku rzutowania:
[w wersji pdf Rysunek 15.1 jest na następnej stronie]
Jeszcze bardziej intrygujący przykład podał w roku 2007 w swojej
pracy licencjackiej [9] student A. Iwanicki; anonsowaliśmy
to odkrycie już w Wykładzie VII. Jest to najbogatszy
możliwy przykład w wymiarze 5.
Ma on granicę minimalną składającą się z 26 kawałków różnych
hiperbol, zaś granica efektywna składa się w nim z (aż) 19
kawałków różnych hiperbol!
|
Σ=1.0808103.4986205.155060-0.1376494.3929403.49862025.24240049.611500-1.70799039.8004005.15506049.611500233.167000-3.10818095.732900-0.137649-1.707990-3.1081800.341958-2.4981404.39294039.80040095.732900-2.49814067.339300,μ=1.5720404.2116606.351950-0.3651595.352790. |
|
Zgodnie z tym, co wyżej zaanonsowane, łamana wierzchołkowa
okazuje się mieć tu aż 25-5-1=26 boków, natomiast
algorytm CLA odnajduje ją w 31=25-1 krokach IN,
1≤#IN≤5. Kolejne kroki są następujące.
(Przy wierzchołkach dających punkty załamania granicy minimalnej
podajemy w nawiasach przedziały dla ,,nadstycznego” parametru λE;
dyskusja nt tych przedziałów – patrz Stwierdzenie 15.1
niżej. Wielkości λhi są tożsame z wielkościami
λlow w etapach bezpośrednio poprzedzających,
porównaj Obserwacja 15.1, część ∙A∙, poniżej.)
|
IN= | 3→3,5→5λhi=28.417,λlow=24.133→2,5→2,3,5→2,3→ |
|
|
| 2λhi=11.386,λlow=8.237→1,2→1,2,3→1,2,3,5→1,2,5→ |
|
|
| 1,5→1,3,5→1,3→1λhi=0.852,λlow=0.629→1,4→1,3,4→ |
|
|
| 1,3,4,5→1,4,5→1,2,4,5→1,2,3,4,5→1,2,3,4→1,2,4→2,4→ |
|
|
| 2,3,4→2,3,4,5→2,4,5→4,5→3,4,5→3,4→4. |
|
Ćwiczenie 15.1
Policzyć do końca tę łamaną wierzchołkową, a następnie zobrazować
ją na rzucie sympleksu Δ5 na płaszczyznę (możliwym, tak
jak możliwy jest rzut hipersześcianu na płaszczyznę, itd.).
Uzasadnienie poprawności algorytmu CLA wraz z
dodatkowymi informacjami na jego temat.
Chcemy dokładniej przyjrzeć się, co się dzieje, gdy łamana
wierzchołkowa Ł¯, odkrywana stopniowo
przez algorytm CLA, zmienia
(A) ścianę IN, #IN≥2, na inną ścianę
IN′,#IN′≥2, względnie
(B) ścianę IN, #IN≥2 na wierzchołek,
np i, po którym z kolei łamana Ł¯
wchodzi w ścianę IN′,#IN′≥2.
Uwaga 15.2
Sytuacje (A) i (B) można też scharakteryzować/rozróżnić inaczej.
Mianowicie, pamiętamy jeszcze z dowodu Twierdzenia 10.1,
że parami rozłączne przedziały EIN, #IN≥2,
dają w sumie z węzłami wyróżnionymi cały przedział Emin,Emax.
W sytuacji (A) domknięcia przedziałów EIN′ oraz EIN
zahaczają się zatem jednym punktem infEIN=supEIN′.
Jest to jeden z węzłów w Twierdzeniu 10.1, przy czym węzeł
niewyróżniony: łamana przechodząc ze ściany IN na ścianę
IN′ nie przechodzi przez żaden wierzchołek sympleksu.
Ten wspólny kres leży więc w dokładnie jednym z przedziałów
EIN, EIN′.
Natomiast sytuacja (B) to po prostu inne wypowiedzenie
zdania `μi jest węzłem wyróżnionym' – porównaj
definicję węzłów wyróżnionych w dowodzie Twierdzenia 10.1
na początku Wykładu XI.
Tak więc, w telegraficznym skrócie, sytuacja (A) –
węzły niewyróżnione, sytuacja (B) – węzły wyróżnione.
W naszych rozważaniach pomocna będzie funkcja wypukła
|
Emin,Emax∋E⟼σ2xE, |
| (15.3) |
której dotyczył już Wniosek 11.1 w Wykładzie XI.
Jako funkcja wypukła, ma ona wszędzie skończone pochodne jednostronne,
zaś w punktach różniczkowalności ma pochodną o wartości 2λEE,
gdzie λE(⋅) to funkcja związana z danym bokiem łamanej Ł
leżącym na jakiejś ścianie ≥1-wymiarowej. (Przy rygorystycznym
podejściu ta funkcja powinna być oznaczana symbolem λINE(⋅).
Na ścianach IN, #IN≥2, współczynniki Lagrange'a
λ i λE są wyznaczone jednoznacznie jako funkcje
portfela wierzchołkowego, a więc też jako funkcje E.) Wynika
to wprost z Obserwacji 6.1 w Wykładzie VI; wspominaliśmy nie raz,
że tamta obserwacja jest technicznie bardzo użyteczna.
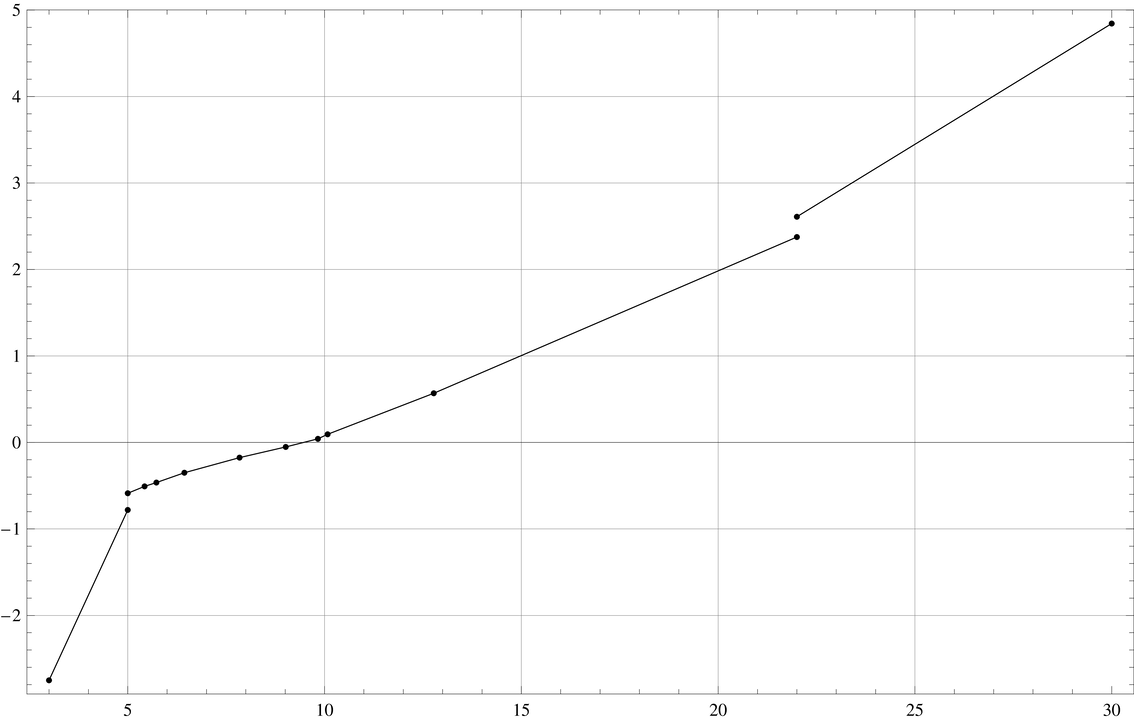
W związku z tym globalna funkcja ΛE,
jest ściśle rosnąca i kawałkami liniowa, z możliwymi skokami w górę:
— w węzłach wyróżnionych, jak np w przykładzie Więcha na rysunku powyżej,
— co widzieliśmy przy okazji rozwiązywania zadania sprawdzającego
z Wykładu X,
— oraz być może w jakichś węzłach niewyróżnionych
– tego jeszcze w tym momencie nie wiemy; w przykładzie Więcha
– bez takich skoków w węzłach niewyróżnionych.
Odcinki, na których funkcja EΛE→λEE
jest liniowa, etykietujemy odpowiednimi zbiorami indeksów IN –
nazwami ścian, których dotyczą. Węzły wyróżnione, w których jest
skok funkcji ΛE, nazywamy pojedynczymi indeksami –
numerami odpowiednich wierzchołków sympleksu. Przejście od
parametru E do λE jest w takich węzłach rodzajem
blow-upu: rozdmuchania punktu do odcinka [wartości parametru λE].
Niech dla IN : #IN≥2, EIN będzie jak
w dowodzie w Wykładzie XI (zbiór wartości oczekiwanych wszystkich
portfeli wierzchołkowych xE leżących na ścianie IN).
Niech ponadto, tym razem dla wszystkich IN niepustych,
LIN oznacza zbiór wszystkich wartości
współczynników Lagrange'a λE w rozwiązaniach warunków
K-kT dla portfeli wierzchołkowych leżących na ścianie IN.
Gdy #IN≥2, jest to (wiemy to już!)
przedział – obraz odpowiedniego przedziału EIN
w globalnej funkcji ΛE:
Natomiast gdy IN=i,
|
Liteż jest przedziałem, |
| (15.4) |
bo dla λE,λE′∈Li i
s,t>0, s+t=1, nierówności wektorowe
|
Σei+λe-λEμ≥0,Σei+λ′e-λE′μ≥0, |
|
pociągają (też wektorową) nierówność
|
Σei+sλ+tλ′e-sλE+tλE′μ≥0, |
|
zaś warunki komplementarności
|
eiTΣei+λe-λEμ=0,eiTΣei+λ′e-λE′μ=0 |
|
oczywiście pociągają warunek
|
eiTΣei+sλ+tλ′e-sλE+tλE′μ=0 . |
|
Istotnie zatem sλE+tλE′∈Li.
Uwaga 15.3
W języku używanym w tym Wykładzie XV, całkiem naturalnym
dla algorytmu CLA, wierzchołek ei sympleksu Δk
występuje po prostu jako singleton i – pewien
jednoelementowy podzbiór zbioru numerów wszystkich
wierzchołków sympleksu. Jest to na tyle naturalne,
że nie powinno powodować nieporozumień.
Li jest zatem przedziałem, ok, lecz jakim konkretnie?
To pytanie jest technicznie najtrudniejsze w całej dyskusji
algorytmu CLA. Zajmiemy się nim za chwilę przy omawianiu
sytuacji (B).
Wracamy teraz do alternatywy (A) versus (B) sformułowanej na
początku dyskusji poprawności algorytmu CLA. (Rzecz dotyczy węzłów
leżących w przedziale Emin,Emax. Po Uwadze 15.2
wiemy już, że to jest po prostu alternatywa węzły niewyróżnione
versus wyróżnione.)
Ad (A) Wobec ścisłej wypukłości funkcji
(15.3) i geometrycznej interpretacji współczynnika
λE, przedziały LIN oraz LIN′ są
rozłączne. Chcemy uzasadnić, że ich domknięcia przecinają się w
jednym punkcie, który zresztą okaże się leżeć w jednym z tych
przedziałów: LIN lub LIN′.
Punkt E~ leżący w części wspólnej domknięć
EIN¯ i EIN′¯ jest w
sytuacji (A) węzłem niewyróżnionym – wiemy to z dowodu (podanego
w Wykładzie XI) Twierdzenia 10.1 o łamanej wierzchołkowej
z Wykładu X.
Pokażemy, że w węźle niewyróżnionym E~ globalna funkcja
ΛE nie ma skoku. Dla ustalenia uwagi niech
np E~∈EIN, E~∉EIN′. Dla wartości E trochę mniejszych od
E~ bierzemy, jednoznacznie określone w
etapie IN′ dowodu z Wykładu XI, wielkości
oraz ich granice
|
xE~=limE→E~-xE,λ~=limE→E~-λE,λ~E=limE→E~-λEE, |
|
tak jak w tamtym dowodzie w Wykładzie XI.
Z warunków dawanych przez twierdzenie K-KT mamy
|
ΣxE+λEe-λEEμ≥0,xETΣxE+λEe-λEEμ= 0 |
|
dla E trochę mniejszych od E~. Zatem również
po przejściu granicznym E→E~-,
|
ΣxE~+λ~e-λ~Eμ≥0,xE~TΣxE~+λ~e-λ~Eμ= 0. |
|
Portfel xE~ leży na ścianie IN, zaś współczynniki
Lagrange'a dla portfeli wierzchołkowych leżących na ścianie IN
są wyznaczone jednoznacznie. A więc, w szczególności,
λ~E=λEE~ liczone
na boku leżącym na ścianie IN. Zatem to właśnie liczba
λ~E okazuje się leżeć w części wspólnej
domknięć przedziałów LIN i LIN′.
Dokładniej,
|
λ~E=infLIN=λlowIN, |
| (15.5) |
przy czym λ~E∈LIN.
Równocześnie
oraz λ~E∉LIN′, bo,
przypominamy, LIN i LIN′ są rozłączne.
W sytuacji przeciwnej w (A): E~∉EIN,
lecz E~∈EIN′ byłoby, oczywiście,
LIN′∋supLIN′ oraz
λlowIN∉LIN,
natomiast równości (15.5)–(15.6) oczywiście
pozostawałyby w mocy.
Wnioskiem z (15.5) i (15.6) jest równość
|
supLIN′=λlowIN. |
| (15.7) |
Wniosek 15.1
Obraz [w odwzorowaniu Markowitza] każdego wierzchołka łamanej
Ł, który nie jest wyróżniony (patrz Twierdzenie 10.1
w Wykładzie X), jest punktem gładkości granicy minimalnej Fmin.
Innymi słowy, sytuacja (A) daje tylko punkty gładkości granicy
minimalnej. Albo też – patrz Uwaga 15.2 powyżej –
punkty na Fmin, których rzędne są węzłami niewyróżnionymi,
są punktami gładkości granicy minimalnej.
Co natomiast skrywa się za sytuacją (B) mogącą wystąpić w
przebiegu algorytmu, czyli – znowu Uwaga 15.2
– co się skrywa za węzłami wyróżnionymi? By odpowiedzieć,
zajmijmy się tą sytuacją szczegółowo.
Ad (B) Teraz w łamanej Ł wierzchołek
ei=xE~, E~=μi, sąsiaduje
z bokiem leżącym na ścianie IN, na którym wartości E są
większe od μi=E~, oraz z bokiem leżącym
na ścianie IN′, na którym wartości E są mniejsze
od E~. Wartość E~ jest węzłem
wyróżnionym w terminologii z Wykładu X.
Dla tego portfela wierzchołkowego ei
nie ma jednoznaczności współczynników Lagrange'a
λ i λE – teoria Blacka się nie stosuje.
Jednak oczywiście można robić przejścia graniczne przy
E→E~- analogicznie, jak w sytuacji (A),
dostając, w oznaczeniach z tamtej sytuacji,
|
Σei+λ~e-λ~Eμ≥0,eiTΣei+λ~e-λ~Eμ= 0, |
| (15.8) |
gdzie λ~E=supLIN′.
I oczywiście też przy E→E~+, dostając
analogicznie
|
Σei+λ~~e-λ~~Eμ≥0,eiTΣei+λ~~e-λ~~Eμ=0, |
| (15.9) |
gdzie tym razem λ~~E=infLIN=λlowIN.
Związki (15.8)–(15.9) pokazują zatem, że
supLIN′,λlowIN∈Li.
Wobec własności (15.4),
|
supLIN′,λlowIN⊂Li. |
| (15.10) |
W istocie jest lepiej. Mianowicie
Stwierdzenie 15.1
Li=supLIN′,λlowIN.
Pokażemy, że dowolna liczba λE∈Li
spełnia
|
supLIN′≤λE≤infLIN=λlowIN, |
| (15.11) |
co łącznie z inkluzją (15.10) zakończy dowód.
Zauważamy w tym celu, że #IN=2=#IN′,
tzn ściany IN, IN′ są po prostu krawędziami
spotykającymi się w wierzchołku ei. Istotnie, warunki
niezdegenerowania spełniane przez Σ,μ pociągają, że w
algorytmie przy przejściu IN→i wypada tylko jeden
indeks, np j, oraz przy przejściu i→IN′ wchodzi
też tylko jeden indeks, np j′. Tak więc IN=i,j,
gdzie μj>μi, oraz IN′=i,j′, gdzie
μj′<μi.
Fakt, że λE∈Li oznacza, że dla
λE i jakiegoś rzeczywistego współczynnika λ
zachodzi
|
Σei+λe-λEμ≥0,eiTΣei+λe-λEμ=0, |
|
a więc równość na składowej numer i oraz nieostre nierówności
≥0 na wszystkich pozostałych składowych, w szczególności
na składowych nr j i j′:
|
σj′i+λ-λEμj′≥0. |
| (15.14) |
Z (15.12) wyznaczamy λ i podstawiamy do
nierówności (15.13)–(15.14), dostając
odpowiednio
|
σji-σii+λEμi-μj≥0, |
| (15.15) |
|
σj′i-σii+λEμi-μj′≥0 . |
| (15.16) |
Pamiętając, że μj′<μi<μj,
nierówności (15.15)–(15.16) dają
|
σii-σj′iμi-μj′≤λE≤σii-σjiμi-μj. |
| (15.17) |
Za chwilę okaże się, że nierówności (15.17) są dokładnie
nierównościami (15.11). Policzymy w tym celu wielkość
λEμi w teorii Blacka, gdy zbiorem aktywnych
indeksów jest i,l, l≠i (teoria Blacka w
wymiarze 2). Wtedy portfele Blacka
|
xixl=E-μlμi-μlμi-Eμi-μl |
|
mają wariancję
|
σ2E=1μi-μl2σiiE-μl2+2σilE-μlμi-E+σllμi-E2, |
|
zaś λEμi=12σ2E′E=μi
(porównaj – kolejny raz! – Obserwacja 6.1 w Wykładzie VI). Liczymy
zatem tę pochodną
|
λEμi=12μi-μl22σiiμi-μl+2σilμi-μl-1+0+0=σii-σilμi-μl. |
|
Następnie, biorąc l=j, mamy
|
σii-σijμi-μj=λEμi=limE→μi+ΛE=λlowIN. |
|
Biorąc natomiast l=j′, mamy
|
σii-σij′μi-μj′=λEμi=limE→μi-ΛE=supLIN′. |
|
Istotnie więc, (15.17) są tożsame z (15.11).
Dowód stwierdzenia jest zakończony.
∎
Zauważmy, że ze Stwierdzenia 15.1 wynika
|
λlowi,supLi=supLIN′,λlowIN. |
| (15.18) |
Jedną szczegółową ilustrację rachunków w tym ostatnim dowodzie
(w ramach przykładu Iwanickiego w wymiarze 5 podanego już wcześniej
w tym Wykładzie XV) podamy jeszcze później, po pewnym ogólniejszym
podsumowaniu.
Pora na rekapitulację. Przeprowadzona powyżej dyskusja
algorytmu CLA pokazała, że w każdej z sytuacji (A) i (B), w opisie
wzajemnych położeń zbiorów LIN, obok liczb
λlowIN zdefiniowanych już jakiś czas
temu wzorem (15.1), ważną – niejako dualną – rolę odgrywają
też liczby supLIN. Naturalne jest w takiej sytuacji
przyjąć następującą ogólną
Definicja 15.2
gdzie IN to dowolny z etapów występujących w danej
realizacji algorytmu CLA.
(Podkreślamy, że w książce Markowitza [22] wielkości
λlowIN i λhiIN
definiowane są równocześnie. W tych wykładach – nie. Wiąże się
to ze zbyt mocnymi warunkami niezdegenerowania zakładanymi u
Markowitza. Nasze ,,niezdegenerowane parametry” są
scharakteryzowane słabszymi warunkami; niżej piszemy
o tym szerzej.)
Po przyjęciu takiego oznaczenia, w sytuacji (A)
wzór (15.7) przybiera przejrzystą postać
Natomiast w sytuacji (B), równość (15.18)
po wprowadzeniu tego nowego symbolu, oznacza
oraz
Wniosek 15.2
W każdym węźle wyróżnionym E~=μi
globalna funkcja ΛE ma skok w górę równy
λhii-λlowi>0.
Innymi słowy, w sytuacji (B) w opisie przebiegu algorytmu CLA
mamy zawsze punkt załamania granicy minimalnej w aspekcie M.
Zestawiając ten wniosek z poprzednim Wnioskiem 15.1,
widzimy, że to dokładnie węzły wyróżnione okazują się być rzędnymi
punktów załamania granicy minimalnej, zaś dany skok funkcji
ΛE mierzy (co prawda na mniej kanonicznej płaszczyźnie
wariancja – wartość oczekiwana i tylko z dokładnością
do czynnika 2) wielkość takiego załamania.
Zapamiętajmy ten fakt; to jeden z kilku
kluczowych momentów całego wykładu APRK1.
Uwaga 15.4
Dla każdego zbioru IN pojawiającego się w danej realizacji
algorytmu CLA istnieje poręczna formuła na wielkość
λhiIN, analogiczna
do formuły (15.1) definiującej
λlowIN.
Skoro jest to kres górny wartości λE, przy których
na ścianie IN zachodzą warunki K-KT charakteryzujące portfele
wierzchołkowe, zatem, rozwiązując wiadomy układ liniowych
nierówności dających ograniczenia z góry na
λE,
|
λhiIN=min-αiβi,-γjδj|i∈IN,βi<0,j∈OUT,δj<0. |
| (15.22) |
(We wszystkich literach greckich w (15.22) dla
lepszej czytelności opuszczony jest dolny indeks `IN′.
Ponadto, gdy w momencie startu algorytmu IN=i0
i μi0=Emax, wtedy ten kres górny
przyjmuje się równy +∞).
Z przeprowadzonych dotąd rozważań wynika
∙λlowIN<λhiIN
dla każdego IN⊂1, 2,…,k pojawiającego
się w danej realizacji algorytmu CLA.
∙A∙ Jeśli w realizacji algorytmu CLA po
etapie IN bezpośrednio następuje etap IN′,
to λlowIN=λhiIN′.
Punkt ∙ wynika z samego opisu etapów algorytmu CLA.
Natomiast punkt ∙A∙, ogniskujący jak w soczewce
całe piękno algorytmu CLA, wynika z równości (15.19),
(15.20) i (15.21). Wzory na
λlowIN (patrz (15.1) ) i na
λhiIN′ (patrz (15.22), gdzie
oczywiście IN trzeba zastąpić przez IN′) nie mają na
pierwszy rzut oka nic wspólnego. A jednak zawsze wyrażają te
same wielkości!
Jest bardzo pouczające przeanalizować ten punkt ∙A∙
Obserwacji 15.1 powyżej na wybranych fragmentach przebiegu algorytmu
CLA w przykładzie Iwanickiego (już wcześniej przytoczonym).
Kolejność następowania etapów w tamtym przykładzie jest znana, bo
też już była podana wcześniej. I otóż, z przybliżeniem do trzech
miejsc dziesiętnych po przecinku,
|
λlow1,3=0.852=λhi1. |
| (15.23) |
Ta ostatnia równość (15.23) jest szczególnie godna uwagi.
Z jednej strony można obliczyć nawet dokładniej, że
|
λhi1=0.8523696,λlow1=0.6289798 . |
|
Z drugiej strony walory, których wartości oczekiwane sąsiadują z
μ1=1.57204 to: walor drugi (sąsiadowanie z góry, μ2=4.21166)
oraz walor czwarty (sąsiadowanie z dołu, μ4=-0.365159).
Kuszące jest spróbować zastosować poznane wcześniej
(jeszcze w dowodzie Stwierdzenia 15.1) wzory:
σ11-σ14μ1-μ4 na
λlow1, oraz σ11-σ12μ1-μ2
na λhi1. W efekcie dostalibyśmy poprawnie
|
λlow1=1.08081--0.1376491.57204--0.365159=0.62898, |
|
lecz także
|
σ11-σ12μ1-μ2=1.08081-3.498621.57204-4.21166=0.91597, |
|
co już nie jest wartością występującą w (15.23).
Czyżby rozwinięta wcześniej teoria przestawała pracować?
Nic podobnego. Zapomnieliśmy tylko, że w aktualnym
przebiegu CLA w przykładzie Iwanickiego, przed dojściem
do wierzchołka 1 nie jesteśmy na krawędzi łączącej
go z wierzchołkiem najbliższym w sensie wartości oczekiwanej
(tj na krawędzi 1,2), tylko na krawędzi łączącej
1 z dalszym w sensie wartości oczekiwanej
wierzchołkiem 3 (por. też (15.23) ).
Po uwzględnieniu tego przeoczenia
|
σ11-σ13μ1-μ3=1.08081-5.155061.57204-6.35195=0.85237=λhi1 |
|
już jak trzeba.
W charakterze komentarza do Obserwacji 15.1 powyżej
należy stwierdzić, że słowa ,,pojawiającego się w danej
realizacji algorytmu” są w tej obserwacji kluczowe.
⋆ Np w znanym nam przykładzie Mordona
[przytaczanym tu od nowa dla wygody czytelnika]
na ścianie 1, 3, przez którą nie przebiega
łamana wierzchołkowa wielkości λlowIN
i λhiIN nabierają zaskakujących
znaczeń. Dokładniej, wzory z Wykładu XIV dają formalnie
na tej ścianie
|
x1 | =311+311λE, |
|
|
η2 | =-1011-1011λE, |
|
|
x3 | =811-311λE. |
|
Zatem, liczone czysto formalnie, λlow1,3=max-311/311=-1,
|
λhi1,3=min--1011/-1011,-811/-311=min-1,83=-1 . |
|
Pouczające jest porównać to z pochodną funkcji σ2E na tym
boku. Tutaj σ2x=9x1 2+2x1x3+4x3 2 oraz
x1=E-23, x3=5-E3. Prowadzi to do
|
12dσ 2dE=119E-319. |
|
To wyrażenie jest równe -1 tylko przy E=2, a więc
tylko w wierzchołku e3 sympleksu Δ3 (leżącym w
domknięciu ściany, której dotyczą tu obliczenia).
Zatem wirtualne współczynniki λlow1,3=λhi1,3=-1 wychwytują ten jeden jedyny
portfel na boku x2=0, który a) jest wierzchołkowy (tj leży
na łamanej Ł) i b) w obrazie którego styczna do obrazu boku
x2=0 jest tożsama ze styczną do granicy minimalnej.
Na rysunku poniżej, na – uwaga – płaszczyźnie R2σ2,E,
ta wspólna styczna w punkcie M~e3 jest
niebieska, natomiast w punkcie M~e1 :
styczna do granicy minimalnej jest zielona, zaś styczna do
obrazu boku x2=0 jest czerwona. [W wersji pdf rysunek
trafia na następną stronę.]
Ćwiczenie 15.2 (kontrolne)
Czy czytelnik umie policzyć, na jakich dokładnie wysokościach
narysowane tu styczne przecinają pionową oś zmiennej E ?
⋆A⋆ Jeszcze ciekawszy efekt może wystąpić na ścianie,
której podprzestrzeń afiniczną (rozpinaną przez tę ścianę)
łamana Ł w ogóle omija. Dzieje się tak np w wymiarze 5
ze ścianą 2, 4 w modelu z parametrami
|
Σ=66264621239623232693192646264,μ=54321. |
|
Czysto formalnie, wzory z Wykładu XIV dawałyby
na tej ścianie
|
η1 | =-278-52λE, |
|
|
x2 | =14+λE, |
|
|
η3 | =-518-12λE, |
|
|
x4 | =34-λE, |
|
|
η5 | =-278+32λE. |
|
A zatem, dalej czysto formalnie, byłoby
λlow2,4=max-14,278/32=94, oraz
|
λhi2,4=min--278/-52,--518/-12,-34/-1=min-2720,-514=-514. |
|
W tym przykładzie ściana 2, 4 okazuje się bardzo
nieoptymalna z punktu widzenia relatywnego minimalizowania
ryzyka w modelu i dla wirtualnych wielkości z algorytmu
z nią związanych mamy λlow2,4>λhi2,4.
Podsumowanie algorytmu CLA.
Podczas dyskusji algorytmu CLA wydzieliśmy dwie sytuacje – dwa
możliwe rodzaje przejść między kolejnymi etapami algorytmu, przy
przyjętych przez nas założeniach niezdegenerowania (15.2).
(A). IN⟶IN′, gdzie
#IN,#IN′≥2.
Jak wiemy, zbiory IN oraz IN′ różnią się wtedy tylko
jednym elementem, zaś parametr λE zmienia się płynnie
przy przejściu łamanej wierzchołkowej Ł¯
ze ściany IN na ścianę IN′. Dokładniej,
λE przechodzi przy takim przejściu przez wartość
λlowIN=λhiIN′
(odpowiadający temu węzeł – wartość E jest
niewyróżniony, Wniosek 15.1 powyżej).
Wiemy, że wtedy oba zbiory IN oraz IN′ są
dwuelementowe i oba są – różnymi! – nadzbiorami singletonu
i. W tej fazie algorytmu łamana wierzchołkowa biegnie po
krawędzi IN, wpada w wierzchołek ei, zaś po chwili wybiega z
niego po krawędzi IN′. Jeśli chodzi o parametr λE,
to na boku łamanej Ł¯ będącym częścią lub
całą krawędzią IN, zmniejsza się on (będąc cały czas związany
zależnością z Obserwacji 6.1 ze stycznymi do obrazów punktów
na boku IN) do swego kresu dolnego
λlowIN=λhii
— gdy punkt bieżący na tym boku dobiega do wierzchołka ei.
Następnie parametr obniża się dalej, teraz parametryzując tylko
nadstyczne położenia prostych podpierających granicę
minimalną w obrazie wierzchołka ei, który jest, jak wiemy,
punktem załamania tej granicy. (Odpowiadający temu węzeł
– wartość E=μi jest wyróżniony, Wniosek 15.2
powyżej.)
Parametr λE przebiega tak cały przedział Li
aż do jego lewego końca λlowi=λhiIN′. W tym momencie prosta
podpierająca staje się znowu styczna – tym razem do obrazu
krawędzi IN′. Dalsze zmniejszanie λE to
parametryzowanie boku łamanej Ł¯ będącego
częścią lub całą krawędzią IN′, znowu zgodnie z
zależnością z Obserwacji 6.1 w Wykładzie VI.
Uwaga. Przypomnianego tu w (B) opisu zbioru Li (patrz
Stwierdzenie 15.1 powyżej) wykładowca nie znalazł
w dostępnej literaturze. Został on włączony do wykładów
dopiero w roku akademickim 2009/10.
Podany opis przebiegu algorytmu CLA obowiązuje, powtarzamy
to, przy założeniu warunków niezdegenerowania (15.2).
Zauważmy jednak na koniec, że można podać równoległy zestaw
innych warunków, też pociągający ten sam przebieg
algorytmu, tzn występowanie w jego realizacji tylko sytuacji
typu (A) oraz (B), co prawda przebieganych w przeciwnym
porządku i kierunkach, niż poprzednio. Mianowicie, jeśli
zakładać tylko, że
|
≠(αiβi,γjδj|i∈IN,j∈OUT,βi<0,δj<0)∀∅≠IN⊂{1, 2,…,k}, |
| (15.24) |
wtedy łamaną wierzchołkową Ł¯ można odzyskiwać
od końca do początku: od Emin (i λE=-∞)
do Emax (i λE=+∞). W dyskusji jej przebiegu,
w pełni
analogicznej do tej przedstawionej w Wykładzie XV, akcentuje się
wtedy tylko progowe wartości λhiIN,
IN – ściany aktywne, goszczące łamaną Ł¯.
Warunki (15.24) gwarantują wtedy z naddatkiem brak kolizji
przy zmianach ścian. Zatem Ł¯ wygląda wtedy
tak samo jak przy obowiązywaniu warunków (15.2): doznaje
tylko ewolucji typu (A) i/lub (B). Podkreślamy jeszcze raz,
że każdy z zestawów warunków (15.2) i (15.24)
sam w sobie jest słabszy niż ten, który podany jest na
stronie 161 w [22].
Można zauważyć na koniec, że tak właśnie, na samym początku,
w [19] Markowitz planował znajdować wszystkie portfele
efektywne: zaczynać od portfela mającego minimum wariancji,
natomiast kończyć na portfelu mającym maksimum wartości
oczekiwanej. Można to dokładnie prześledzić w tekście na Rysunku
14.2 (reprodukcja strony 87 z [19]) w Wykładzie XIV.