2. Wykład II, 9.X.2009
Co wiemy na temat rzeczywistych rozkładów zmiennych stóp zwrotu?
Najczęściej nie wiemy nic konkretnego na temat rozkładów zmiennych
stóp zwrotu z akcji spółek notowanych na giełdzie. Markowitz był tego
świadom od samego początku. Na stronie 82 w swoim podstawowym artykule
[19] pisał
… Perhaps there are ways, by combining statistical techniques and the
judgment of experts, to form reasonable probability beliefs μi,σij.
We could use these beliefs to compute the attainable efficient combinations
of E,V. The investor, being informed of what E,V combinations
were attainable, could state which he desired. We could then find
the portfolio which gave this desired combination.
(Początkową część tego cytatu czytelnik znajdzie też dalej
w tych wykładach – na Rysunku 7.2 w Wykładzie VII, gdzie
strona 82 została trochę ucięta przy skanowaniu.)
Natomiast całą pracę [19] kończył Markowitz takimi oto uwagami,
rozwijającymi i ukonkretniającymi te wcześniejsze.
To use the E-V rule in the selection of securities
we must have procedures for finding reasonable μi and σij.
These procedures, I believe, should combine statistical techniques and
the judgment of practical men. My feeling is that the statistical
computations should be used to arrive at a tentative set of μi
and σij. Judgment should then be used in increasing or decreasing
some of these μi and σij on the basis of factors or nuances
not taken into account by the formal computations. Using this revised
set of μi and σij, the set of efficient E,V combinations
could be computed, the investor could select the combination he preferred,
and the portfolio which gave rise to this E,V combination could be
found.
One suggestion as to tentative μi and σij is to use
the observed μi, σij for some period of the past. I believe
that better methods, which take into account more information, can be
found. I believe that what is needed is essentially a ,,probabilistic”
reformulation of security analysis. I will not pursue this subject here,
for this is ,,another story”. It is a story of which I have read only
the first page of the first chapter.
Zgodnie z sugestią Markowitza zawartą w drugim akapicie powyższego cytatu,
estymujemy zatem podstawowe parametry takich zmiennych stóp zwrotu,
używając estymatorów z jednakowymi (mówi się też: jednorodnymi)
wagami, jak w przykładach w Wykładzie I.
Realnie zmienne losowe w analizie portfelowej mogą mieć najrozmaitsze
rozkłady. Oto pewna para takich rozkładów, pojawiająca się
w obecnie już klasycznym przykładzie ,,5 stanów giełdy” (pochodzącym z
dawniejszych wykładów [13] profesora Krzyżewskiego na Wydziale MIM UW;
przykładzie wtedy przesuniętym na ćwiczenia, a teraz analizowanym tutaj
aż do Rysunku 2.1 włącznie, z niespodziewanym nawrotem do niego
jeszcze w Przykładzie 3.3 w Wykładzie III):
| stan |
prawdopodobieństwo wystąpienia |
RA |
RB |
| hossa |
0.2 |
40% |
30% |
| wzrost |
0.3 |
20% |
20% |
| stabilizacja |
0.1 |
10% |
10% |
| spadek |
0.3 |
-10% |
-20% |
| bessa |
0.1 |
-30% |
-20% |
Wartości zmiennych losowych RA i RB to stopy
wzrostu (które mogą też być ujemne) notowań spółek A i B w zaproponowanych
tu możliwych stanach giełdy, w ustalonym okresie inwestycyjnym.
Na podstawie tak podanych danych surowych tworzymy tabelę rozkładu
łącznego zestawu zmiennych RA,RB, albo,
jak niektórzy wolą powiedzieć, tabelę rozkładu zmiennej losowej
dwuwymiarowej.
Następnie obliczamy podstawowe parametry rozkładów zmiennych
RA i RB (tj rozkładów brzegowych wspomnianej
zmiennej losowej dwuwymiarowej):
|
ERA=0.09,ERB=0.05,σ2RA=0.0489,σ2RB=0.0445, |
|
|
covRA,RB=0.0445,ρAB=corRA,RB=0.9539, |
|
|
σRA=0.22113,σRB=0.21095 . |
|
Uwaga 2.1
W dwóch przykładach w Wykładzie I mogliśmy tylko policzyć estymatory
tych parametrów dla zmiennych stóp zwrotu RX,RY
oraz RA,RB; rozkładów tamtych zmiennych nie
znaliśmy. Dzięki estymatorom policzonym dla pierwszej pary tamtych
zmiennych mogliśmy m. in. dopracować się wykresu podanego na
Rysunku 1.2 w Wykładzie I.
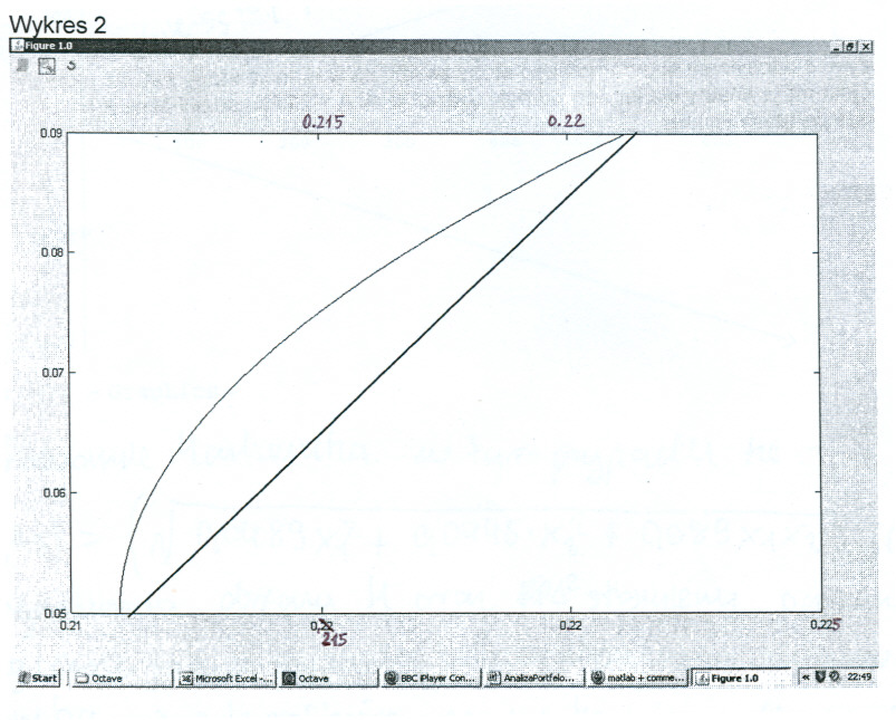
Teraz zmienne losowe znamy dokładnie. Postawmy pytanie, jak w przykładzie
,,5 stanów giełdy” wygląda analogiczny do tamtego wykres na płaszczyźnie
R2σ,E ?
(Dla nas na tym wykresie ważny jest tylko zaznaczony łuk hiperboli.
Znaczenie odcinka prostej widocznego poniżej łuku hiperboli znane
jest tylko studentowi – autorowi wykresu.)
Wprowadzimy teraz cały zestaw oznaczeń ogólnie przyjętych w teorii
Markowitza [19, 21, 22] – tzw. Markowitz setup:
-
Ilość spółek notowanych na giełdzie oznaczamy k.
-
Zmienne losowe – stopy zwrotu z notowań tych spółek w
ustalonym okresie inwestycyjnym oznaczamy R1,R2,…,Rk.
Są to zmienne losowe na tej samej (bliżej nie precyzowanej, por.
powyższy długi cytat z pracy Markowitza) przestrzeni probabilistycznej,
przyjmujące wartości z -1,+∞, o których zawsze będziemy
zakładać, że ich wartości oczekiwane ERi oraz wariancje
σ2Ri, i=1, 2,…,k, są wszystkie skończone.
-
Będziemy pisali krótko: ERi=μi,
σRi=σi, σij=covRi,Rj=ρijσiσj, gdzie ρij=corRi,Rj dla 1≤i≠j≤k.
-
Wektor wartości oczekiwanych μi oznaczamy
μ=μii=1k, zaś wektor zmiennych losowych
Ri oznaczamy R=Rii=1k.
-
Będziemy mówić, że wektorowa zmienna losowa R ma wektorową
wartość oczekiwaną ER=μ. Wektor odchyleń standardowych
będziemy (czasem) oznaczać σ=σii=1k.
-
Wreszcie macierz kowariancji wektorowej zmiennej losowej
R=R1,R2,…,RkT oznaczamy
|
Σ=σ1 2σ2 2σijσij⋱σk 2=σ1 2σ2 2ρijσiσjρijσiσj⋱σk 2. |
|
-
Teoria, którą będziemy poznawać na tych wykładach, nie
jest (o ile ktoś miałby jeszcze co do tego wątpliwości) oderwana od
życia. Oto – dla ilustracji tej tezy – treść ulotki banku ING BSK
z roku 2009, reklamującej pewien nowy produkt banku: ,, Na
wysokość wypłaty na koniec programu wpływa wzrost wartości portfela
inwestycyjnego. Strategia inwestycyjna została oparta na
innowacyjnym modelu matematycznym, który zdobył nagrodę Nobla
(Markowitz Efficient Frontier Theory). Jego unikalność polega na
tym, że generuje stabilne dochody zarówno na rynkach wzrostowych,
jak i spadkowych.”
-
W Wykładzie I (Rysunek 1.1) dowiedzieliśmy się, jak fundusz
wielkiego inwestora Warrena Buffetta ,,bije” (w długim i trudnym
okresie czasu 2006 - 2010 obejmującym kryzys finansowy lat 2008-9)
amerykańską giełdę. W naszym kraju też zdarzają się godne uwagi
osiągnięcia na podobnym polu. Dokładniej, w pierwszej połowie
roku 2010, w V Mistrzostwach Polski Inwestorów, zwycięzca w
kategorii akcje (pan Andrzej Laskowski z Redy) zwiększył
wartość swojego portfela aż o 78%.
Dowód wynika wprost z wcześniej podanych (i znanych już
z wykładu RP 1) definicji.
Przykład 2.1
W przykładzie ,,5 stanów giełdy”, wobec obliczeń
zrobionych już wcześniej, wektor μ i macierz Σ to
|
μ=0.090.05,Σ=0.04890.04450.04450.0445. |
|
Przypomnienie. Kryterium Sylvestera, poznane na I roku
na wykładach z GALu, wyjaśnia, kiedy macierz Σ rzeczywista
i symetryczna wymiaru k×k jest dodatnio określona:
|
Σ>0⟺Σ12…p12…p>0dlap=1, 2,…,k, |
|
gdzie Σi1i2…ipj1j2…jp to minor p×p w macierzy Σ używający
wierszy o numerach i1,i2,…,ip oraz kolumn o numerach
j1,j2,…,jp (używamy tu oznaczeń ze zbyt mało w Polsce
znanego podręcznika z teorii macierzy i algebry liniowej [6]).
Minory Σ12…p12…p
w kryterium Sylvestera to minory główne macierzy Σ.
Znane jest też podobne kryterium na temat nieujemnej określoności
macierzy, aczkolwiek nie wchodzi ono do standardowego kursu GALu.
Mianowicie, dla macierzy Σ, kwadratowej k×k
rzeczywistej symetrycznej,
|
Σ≥0⟺Σi1i2…ipi1i2…ip≥0dla 1≤i1<i2<…<ip≤k, |
|
przy wszystkich p=1, 2,…,k. Minory Σi1i2…ipi1i2…ip to minory
centralne macierzy Σ.
To nowe kryterium jest w istocie dość szybkim wnioskiem
z kryterium Sylvestera – patrz [6], strona 270. Kluczowe
miejsce w rozumowaniu, aczkolwiek piękne, jest tam jednak zredagowane
niezmiernie lakonicznie. Dla wygody czytelnika, poniżej przytaczamy
właściwy fragment wspomnianej strony z [6].
(W rozwinięciu ϵp+… minora centralnego
Aϵi1i2…ipi1i2…ip
występują wyrazy z nieujemnymi współczynnikami przy potęgach
ϵp-1,…,ϵ1, 1 — dlaczego?)
W tej chwili mamy już język, lecz jest on jeszcze dla nas martwą
literą. Jak Markowitz koduje, czy modeluje, swoje portfele?
Wskazówki dostarcza już Wykład 1, gdzie co prawda występują
tylko dwie spółki, zaś portfele opisywane są punktami x=x1x2 leżącymi
na prostej x1+x2=1 w pierwszej ćwiartce (czyli spełniającymi
warunki x1≥0 i x2≥0). Ze swojego kapitału L,
inwestor przeznaczał tam x1L na zakup akcji pierwszej spółki
(i kupował tych akcji x1LC1,pocz) oraz
x2L na zakup akcji drugiej spółki (których kupował
x2LC2,pocz).
Teraz, gdy dostępne są akcje spółek o numerach 1, 2,…,k,
inwestor dzieli swój kapitał L na części
gdzie oczywiście x1,x2,…,xk≥0 oraz x1+x2+⋯+xk=1. Następnie, dla i=1, 2,…,k,
za kwotę xiL kupuje on akcje spółki numer i.
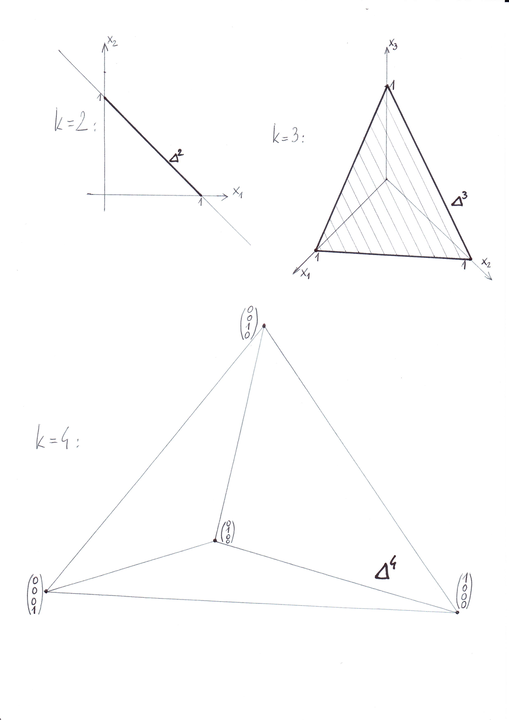
Możliwe portfele inwestora są więc teraz opisywane punktami
takimi, że x1+x2⋯+xk=1 oraz x1,x2,…,xk≥0.
Zbiór wszystkich takich punktów oznaczamy symbolem Δk,
Δk⊂Rk. Jest to tzw. sympleks standardowy
w Rk [w wersji pdf Rysunek 2.3 wypada dopiero na następnej stronie]:
W Wykładzie I widzieliśmy, że zainwestowanie własnego kapitału w akcje
spółek A i B, opisane (czy zakodowane) portfelem x1,x2T∈Δ2 ma stopę zwrotu (lub, krócej: taki portfel ma stopę zwrotu)
x1RA+x2RB. Czy analogicznie jest gdy inwestuje się kapitał w
akcje k spółek? Tzn czy w dalszym ciągu ma miejsce odpowiedniość
|
Δk∋x⟷ zmienna losowa x1R1+x2R2+⋯+xkRk=xTR |
| (2.1) |
wiążąca dany portfel Markowitza ze zmienną losową stojącą po
prawej stronie w (2.1) jako jego stopą zwrotu ?
Tak jest w istocie. Jeżeli przez L oznaczymy kapitał inwestora, wtedy
xi⋅L będzie kwotą przeznaczoną przez niego na zakup akcji spółki
numer i. Jeśli Ci,pocz i Ci,kon oznaczają
notowania akcji i-tej spółki odpowiednio na początku i na końcu okresu
inwestycyjnego (pamiętamy, że ta druga wielkość jest zmienną losową) oraz
xi⋅LCi,pocz jest ilością nabytych przez inwestora
akcji i-tej spółki, wtedy jego portfel x=x1,…,xkT
ma łącznie stopę zwrotu
|
∑i=1kCi,kon⋅xi⋅LCi,pocz-LL | =∑i=1kCi,kon⋅xi⋅LCi,pocz-∑i=1kCi,poczxi⋅LCi,poczL=∑i=1kxi⋅Ci,kon-Ci,poczCi,pocz |
|
|
| =∑i=1kxiRi. |
|
To spostrzeżenie motywuje następującą
Definicja 2.1
Dla każdego portfela Markowitza x∈Δk
-
(i) Wartością oczekiwaną portfela x, oznaczaną Ex,
nazywamy wartość oczekiwaną zmiennej stopy zwrotu przy inwestowaniu
w ten portfel, czyli zmiennej losowej stojącej po prawej stronie
w (2.1): Ex=ExTR.
-
(ii) Odchyleniem standardowym (względnie wariancją) portfela x,
oznaczanym σx ( σ2x ), nazywamy odchylenie
standardowe (wariancję) zmiennej losowej xTR:
σx=σxTR ( σ2x=σ2xTR ).
Obserwacja. 2.2
-
-
(ii) σ2x=xTΣx dla x∈Δk.
-
(iii) Macierz Σ jest nieujemnie określona i σx=xTΣx dla x∈Δk.
-
(i) Ex=ExTR=xTER=xTμ,
-
(ii) σ2x=σ2xTR=ExTR-ExTR2=ExTR-μ2=!ExTR-μxTR-μT=E(xT(R-μ)(R-μ)Tx)=xTE((R-μ)(R-μ)T)x=Obs. 2.1xTΣx.
-
(iii) Dowolnie ustalamy y∈Rk i rozważamy zmienną losową
y1R1+y2R2+⋯+ykRk niezwiązaną ściśle z analizą
portfelową. Powtarzając rachunki z dowodu (ii) (w którym nie wykorzystaliśmy
założenia x∈Δk),
zaś wzór na σx dla x∈Δk wynika z już udowodnionej części (ii).
∎
W teorii Markowitza kluczową rolę odgrywa odwzorowanie Markowitza
M:
|
Δk∋x⟼Mx=σxEx=xTΣxμTx∈R2σ,E. |
|
Często używane też jest zmodyfikowane odwzorowanie Markowitza
M~:
|
Δk∋x⟼M~x=σ2xEx=xTΣxμTx∈R2σ2,E. |
|
Uwaga 2.2
-
a) W oryginalnych pracach Markowitza (i tylko Markowitza)
kolejność zmiennych jest odwrócona: E jest odkładana na osi odciętych,
natomiast σ (względnie σ2) – na osi rzędnych. Oczywiście
sam Markowitz nie nazywał tak tych odwzorowań. Mówił on tylko o `attainable
E,V combinations' – patrz np strona 82 w [19]. Powyższe
nazwy i sam symbol M wprowadził, być może nie jako jedyny
na świecie, Krzyżewski w [13].
-
b) W późniejszej części teorii, którą poznaje się na wykładach
z analizy portfelowej, odwzorowania M i M~
będą miały o wiele większą dziedzinę
|
H=x=x1,…,xkT∈Rk:x1+⋯+xk=1. |
| (2.2) |
Będzie to więc hiperpłaszczyzna afinicznie rozpięta przez sympleks
standardowy Δk (oczywiście Δk⊂H). Okaże się przy tym,
że odwzorowania M i M~ idące z H zachowują
swoje wzory definicyjne z podejścia Markowitza! Patrząc na to z innej strony,
tylko przez jakiś czas zajmować się będziemy wyłącznie portfelami Markowitza
leżącymi w sympleksach standardowych Δk i (tym samym) mającymi
wszystkie współrzędne nieujemne.
-
c) Obraz MΔk będziemy nazywali
zbiorem osiągalnym (niektórzy mówią też: zbiór możliwości)
w teorii Markowitza. Podobnie, MH będzie zbiorem osiągalnym
w tej sygnalizowanej w b) szerszej teorii, która później włączy w siebie
teorię Markowitza.
Ćwiczenie 2.1
Uzasadnić, że punkt 1,2,3T∈R3 i pięć innych
punktów powstających z niego przez wszelkie możliwe permutacje
współrzędnych, leżą wszystkie na jednej płaszczyźnie (inaczej
mówiąc: wymienione punkty są współpłaszczyznowe).
Ćwiczenie 2.2 (nie takie natychmiastowe)
Na płaszczyźnie H⊂R3 zdefiniowanej w (2.2) przy k=3
rozważamy prostą a1x1+a2x2+a3x3=b oraz prostą
a1x1+a2x2+a3x3=b′; nie wszystkie współczynniki ai są sobie
równe. Wyznaczyć odległość tych prostych jako podzbiorów przestrzeni R3
wyposażonej w metrykę euklidesową.
Rozwiązanie:
Ta odległość jest niemniejsza (najczęściej większa) niż odległość
odpowiednich płaszczyzn w R3.
Jaki wektor wyznacza kierunek obu tych prostych? Oczywiście iloczyn wektorowy
|
111a1a2a3=a3-a2a1-a3a2-a1. |
|
Z kolei, jaki wektor jest równoległy do H i prostopadły do obu tych prostych?
Oczywiście
|
v=a3-a2a1-a3a2-a1111=2a1-a2-a3-a1+2a2-a3-a1-a2+2a3. |
|
Za chwilę przyda się też jego długość
v=3a1-a22+a2-a32+a3-a12.
Ile tego wektora przenosi pierwszą prostą z zadania na drugą? Taka wielokrotność
tv, że a1a2a3tv=b′-b, czyli w postaci rozwiniętej
|
a1a2a3t2a1-a2-a3-a1+2a2-a3-a1-a2+2a3=b′-b. |
|
Stąd po krótkim rachunku
(długość wektora v jest już wyznaczona wcześniej).
Tak więc szukana odległość prostych to
|
tv=3b′-bv2v=3b′-bv=3b′-ba1-a22+a2-a32+a3-a12. |
|
Ćwiczenie 2.3
Kiedy odległość prostych z Ćwiczenia 2.2 (wycinanych na H przez płaszczyzny
o podanych równaniach) jest równa odległości samych płaszczyzn
a1x1+a2x2+a3x3=b i a1x1+a2x2+a3x3=b′ ?
Wskazówka:
Okazuje się, że aby tak było, współczynniki a1,a2,a3 winny spełniać
pewne równanie.