3. Wykład III, 16.X.2009
Przykłady obliczeń odwzorowania Markowitza w najprostszych
sytuacjach – gdy okazuje się ono być liniowe lub kawałkami
liniowe. (Od takich prostych przykładów zaczyna się najczęściej,
bo rzadkie są sytuacje, gdy odchylenie standardowe portfela
Markowitza da się policzyć bez wyciągania pierwiastka kwadratowego.
Wykłady [13] też od tego zaczynały. Wielokąty wypukłe i odbicie
w pionowej osi OE→, które czytelnik zobaczy
poniżej, pojawiały się już w [13]. Natomiast specyfiką
bieżących wykładów jest wielokrotne używanie w różnych
sytuacjach modeli ± doskonale skorelowanych. Dokładniej,
szereg interesujących przykładów będzie się brał z odpowiedniego
zaburzania macierzy kowariancji postaci jak tu niżej
w I i II. Np przykład dany w przypisie nr 3
w Wykładzie XI (w wersji html jest to przypis nr 31) – do
macierzy ± doskonale skorelowanej dodana tam zostanie
macierz Id.)
I. Załóżmy przez chwilę, że zmienne losowe R1,…,Rk są
wszystkie doskonale dodatnio skorelowane, tzn ρij=1
dla 1≤i≠j≤k, albo też σij=σiσj
dla i≠j, tzn Σ=σσT.
Wtedy xTΣx=xTσσTx=σTx2, xTΣx=σTx dla x∈Δk.
Zatem Mx=σTxμTx dla x∈Δk. Odwzorowanie Markowitza
jest w tym przypadku liniowe (dokładniej: zapisuje się
liniowymi wzorami; jego dziedzina Δk rzecz prosta
nie jest przestrzenią liniową; nawet powłoka afiniczna
dziedziny, czyli hiperpłaszczyzna H zdefiniowana w Wykładzie II
wzorem (2.2) , nie jest przestrzenią liniową).
II. Zmienne losowe R1,…,Rk rozpadają się na dwie grupy
R1,…,Rr oraz Rr+1,…,Rk gdzie 1≤r≤k-1.
Zakładamy, że zmienne w każdej z grup są parami doskonale dodatnio
skorelowane, zaś między grupami są doskonale ujemnie
skorelowane. Innymi słowy macierz współczynników korelacji to
,
albo jeszcze inaczej
|
Σ=σ1⋮σr-σr+1⋮-σkσ1…σr-σr+1…-σk |
|
Uwaga 3.1
Chociaż tak skrajne rozbicie spółek giełdowych na dwie antagonistyczne
grupy nigdy nie występuje w praktyce, to jednak coś trochę zbliżonego
obserwowano na giełdzie w Tokio bezpośrednio po katastrofalnym
trzęsieniu ziemi w mieście Kobe w styczniu 1995 roku. Wtedy korelacje
między stopami zwrotu z akcji firm budowlanych i ubezpieczeniowych były
między -0.6 i -0.2, podczas gdy w warunkach stabilnych prawie
wszystkie współczynniki korelacji są między 0.5 i 0.7 .
(Średni współczynnik korelacji na NYSE wynosi 0.6 .)
W tej sytuacji σ2x=xTΣx=
|
xTσ1⋮σr-σr+1⋮-σkσ1…σr-σr+1…-σkx=σ1…σr-σr+1…-σkx2 |
|
oraz σx=
|
xTΣx=σ1…σr-σr+1…-σkx=σ1x1+⋯+σrxr-σr+1xr+1-⋯-σkxk, |
|
dla x∈Δk. Zatem
|
Mx=σ1x1+⋯+σrxr-σr+1xr+1-⋯-σkxkμTx,x∈Δk. |
|
Odwzorowanie Markowitza jest więc złożeniem liniowego przenoszącego
Δk na pewien wielokąt wypukły położony po obu stronach osi
OE→ i ,,nakładki” R2σ,E→R2σ,E,
σE⟼σE.
Pierwsze z narzucających się tu pytań to
-
Czym są zbiory osiągalne MΔk w sytuacjach
I i II?
-
Czym są granice: minimalna Fmin i maksymalna Fmax
dla MΔk w sytuacjach I i II,
gdzie te granice definiowane są, i to ogólnie, nie tylko w sytuacjach
doskonałych, w sposób następujący
|
Fmin=defzbiór lewych krańców
zbiorów liniowych MΔk∩E=const, |
|
|
Fmax=defzbiór prawych krańców
zbiorów liniowych MΔk∩E=const. |
|
(Zbiory liniowe występujące w tych definicjach zawsze są ograniczone,
bo MΔk jest zbiorem zwartym w R2σ,E.)
Na temat zbiorów osiągalnych:
|
MΔk=Mconv10⋮0,01⋮0,…,00⋮1=convM10⋮0,…,M00⋮1 |
|
jest to więc l-kąt wypukły, 1≤l≤k, położony w prawej (otwartej)
półpłaszczyźnie R2σ,E, bo σ1,…,σk>0.
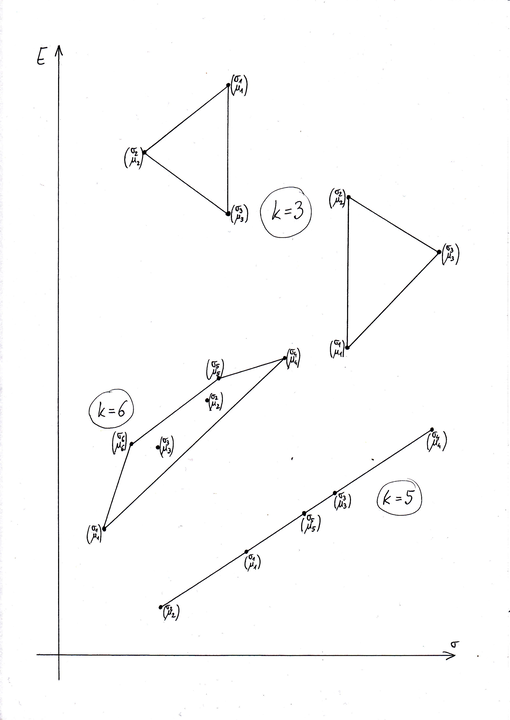
Dlaczego ogólnie l-kąt, a nie po prostu k-kąt? Ponieważ niektóre (lub wiele
z nich) obrazy wierzchołków sympleksu Δk mogą nie być punktami
ekstremalnymi tego zbioru wypukłego. Lub też, w sytuacji skrajnej, wszystkie
te obrazy mogą się pokrywać, dając w wyniku po prostu punkt (1-kąt wypukły).
Niektóre z możliwych tu sytuacji są przedstawione na Rysunku 3.1 poniżej.
by uzyskać MΔk, najpierw tworzymy pomocniczy wielokąt wypukły
convσiμi:i=1,2,…,r;-σjμj:j=r+1,…,k, który – uwaga – położony jest po obu stronach
osi OE→. Dokładniej, chwilowo ignorujemy znak wartości bezwzględnej
w aktualnym wzorze na M i stosujemy rachunek wypukły z sytuacji I.
Jedyna różnica w porównaniu do I jest taka, że teraz dostajemy jakiś l-kąt
wypukły, gdzie 2≤l≤k (nie dostajemy pojedynczego punktu, bo trafiamy w
obie półpłaszczyzny). Szukany MΔk jest obrazem tego l-kąta
przy przekształceniu R2σ,E→R2σ,E,
σE⟼σE,
które zachowuje punkty w prawej półpłaszczyźnie, zaś punkty z lewej
półpłaszczyzny odbija w pionowym lustrze do prawej.
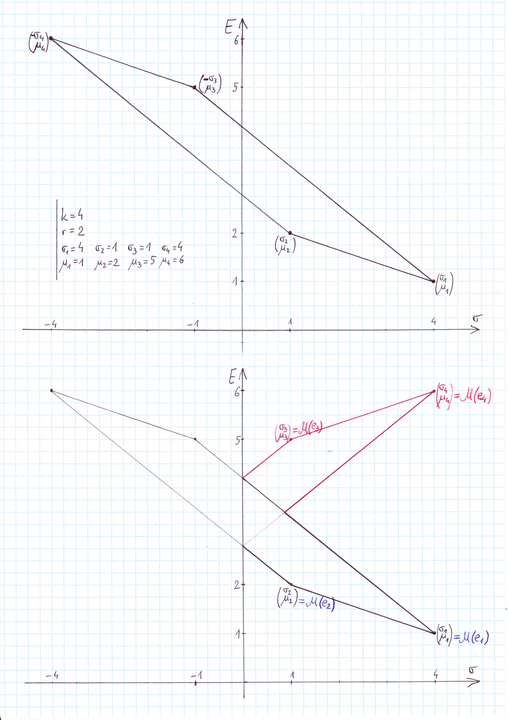
Przykład 3.1
Weźmy k=4, r=2 oraz σ1=4,σ2=1,σ3=1,σ4=4;μ1=1,μ2=2,μ3=5,μ4=6. Na Rysunku 3.2 tuż poniżej pokazane
jest powstawanie zbioru MΔ4 we wspomnianych dwóch krokach; e1,
e2, e3, e4 to, oczywiście, kolejne wierzchołki sympleksu Δ4.
Na temat granic minimalnych i maksymalnych:
Te pytania w sytuacji I są całkiem elementarne, nietrudno scharakteryzować
(i należy to zrobić samemu!) rodziny łamanych, którymi są takie granice.
Jednak już w sytuacji II, nawet przy ustalonym dyskretnym parametrze
r∈1, 2,…,k-1, opisy granic stają się dosyć skomplikowane.
Zatrzymajmy się na chwilę przy tych opisach.
Fmin jest wtedy łamaną o nie więcej niż k+1 bokach, przy czym ta ilość
jest osiągana przy każdym k i każdym r (dlaczego?). k+1 jest więc najmniejszym
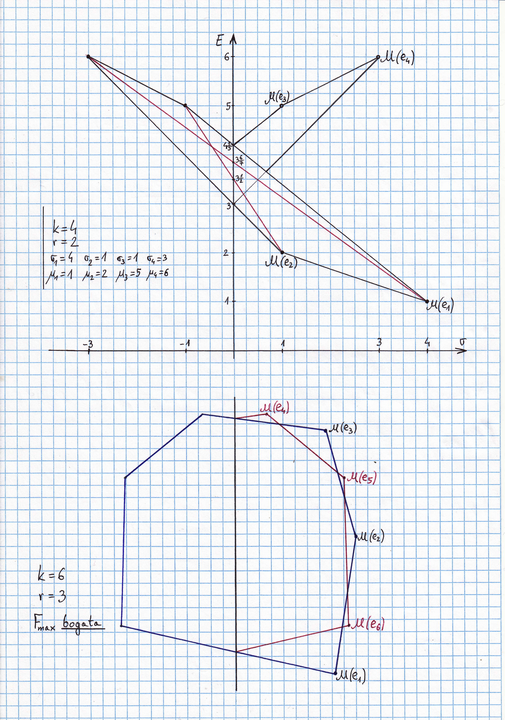
ograniczeniem górnym ilości boków łamanej Fmin. Np na Rysunku 3.2, przy k=4
i r=2, łamana Fmin składa się z 5 boków. Tak samo jest w sytuacji przedstawionej
w górnej części Rysunku 3.3 tuż poniżej, choć ten przykład jest subtelniejszy od
poprzedniego i będzie w przyszłości wykorzystany w innym celu.
Ćwiczenie 3.1
W sytuacji ± doskonale skorelowanej przy ustalonych wielkościach k i r,
znaleźć najmniejsze ograniczenie górne (dlaczego takie istnieje?) ilości boków
łamanej Fmax.
Wskazówka:
Zanalizować przykład pokazany w dolnej części Rysunku 3.3 powyżej, gdzie
przy k=6 i r=3 granica (tu łamana) maksymalna składa się z 10 boków.
Rozwiązanie:
Pokazać, że poszukiwanym ograniczeniem jest funkcja od k i r zdefiniowana
następująco
|
k-2+2r=2k-2gdy r=k-r,k-1+2minr,k-rgdy r≠k-r. |
|
(To zadanie rozwiązują, z różnymi efektami, kolejne roczniki słuchaczy wykładów
z APRK1 na Wydziale MIM. Stanowi ono dobry wstęp do poznania i rozumienia ,,parasolkowatej”
natury granicy maksymalnej Fmax dla ogólnych odwzorowań Markowitza
– gdy odrzuci się sztuczne założenie ± doskonałej korelacji zmiennych stóp
zwrotu.)
Dygresja nt podprzestrzeni zerowych form kwadratowych nieujemnie określonych.
Chodzi tu o zbiory wektorów, na których zerują się formy kwadratowe nieujemnie
określone. Często, ustalając bazę w przestrzeni Rk (np bazę standardową
e1,…,ek)), utożsamia się formy z macierzami nieujemnie określonymi
k×k. Zaczynamy od prostego pytania
Ćwiczenie 3.2
Czy macierze Σ w sytuacjach doskonale skorelowanych
I i II są dodatnio określone ?
Rozwiązanie:
Nie, gdyż mają one duże zbiory wektorów y∈Rk zerujących
odpowiadającą im formę kwadratową yTΣy. Z wcześniejszych obliczeń
wiemy, że te zbiory są hiperpłaszczyznami liniowymi: ∑i=1kσiyi=0
w sytuacji I, względnie ∑i=1rσiyi-∑i=r+1kσiyi=0
w sytuacji II.
Trochę trudniej jest pokazać, że
Ćwiczenie 3.3
Σ≥0⇒y∈Rk|yTΣy=0
jest podprzestrzenią liniową Rk. Jest to właśnie tzw.
podprzestrzeń zerowa formy mającej macierz Σ.
Rozwiązanie:
yTΣy=y~TΣy~=0⇒y+y~TΣy+y~=2yTΣy~≥0 oraz też y-y~TΣy-y~=-2yTΣy~≥0. Te dwie nierówności dają łącznie yTΣy~=0, i dalej y+y~TΣy+y~=0.
Dokładniejszą informację może dać
Ćwiczenie 3.4
Ustalić (jeśli istnieje) związek między rzędem macierzy Σ≥0
i wymiarem jej podprzestrzeni zerowej.
Zauważmy jeszcze, tylko informacyjnie, że ogólnie zbiór wektorów zerujących
daną formę kwadratową nie musi mieć struktury przestrzeni liniowej.
Przykład 3.2
Już forma kwadratowa na R2 mająca w bazie standardowej macierz
100-1,
tj przyjmująca na wektorze y1,y2T wartość
y1 2-y2 2, jest taka.
Gdy macierz kowariancji Σ jest dodatnio określona, wtedy (oczywiście)
żaden portfel Markowitza nie ma zerowego ryzyka. Natomiast czasami, i to już
przy k=2, można zmniejszać ryzyko portfela Markowitza poniżej wielkości
minσ1,σ2. Tak jest w obu przykładach w Wykładzie I;
porównaj w szczególności Rysunek 1.2 dotyczący jednego z nich. Czasami zaś
nie można zejść poniżej minσ1,σ2, jak w przykładzie
,,5 stanów giełdy” w Wykładzie II, porównaj z kolei Rysunek 2.1. Od czego
to zatem zależy? Przynajmniej przy k=2 chcielibyśmy mieć tu jasność.
Język naszego opisu to μ1,μ2,σ1,σ2,ρ=ρ12.
Liczby μi są rzeczywiste nie mniejsze niż -1 i różne, by
portfele mogły mieć różne wartości oczekiwane. Liczy σi są dodatnie,
natomiast ρ∈-1, 1. Podczas rachunku przyjmujemy domyślnie,
że jeśli σ1=σ2, to wtedy ρ≠1.
Celem jest, czego domyślamy się już z dotychczasowych doświadczeń
i na wykładzie i na ćwiczeniach, uzyskanie hiperboli na płaszczyźnie
R2σ,E, względnie paraboli na płaszczyźnie R2σ2,E
(parabola będzie nawet wtedy, kiedy hiperbola przy ρ=1 zdegeneruje
się do pary prostych).
Obliczamy wariancję portfela, parametryzując najpierw parametrem x1:
|
σ2=σ2x11-x1=x11-x1σ1 2ρσ1σ2ρσ1σ2σ2 2x11-x1=σ1 2-2ρσ1σ2+σ2 2x1 2+2ρσ1σ2-2σ2 2x1+σ2 2, |
| (3.1) |
podczas gdy
albo
i to wyrażenie będzie można podstawić do (3.1).
Uwaga 3.2
Jest jeden jedyny przypadek, gdy (3.1) nie wyraża
kwadratowej zależności σ2 od x1: σ1=σ2
i ρ=1. Wtedy znikają tam współczynniki przy x1 2 oraz x1,
i przez to σ2x11-x1≡σ2 2. Ten przypadek wykluczyliśmy na początku rachunku.
Trójmian wyrażający wariancję ma minimum w
|
x1,0=σ2 2-ρσ1σ2σ1 2-2ρσ1σ2+σ2 2, |
|
z czego wyliczamy, dzięki (3.2), wartość oczekiwaną E0
odpowiadającą tej wartości x1=x1,0,
|
E0=E0ρ=μ1σ2 2+μ2σ1 2-μ1+μ2ρσ1σ2σ1 2-2ρσ1σ2+σ2 2. |
| (3.3) |
Patrząc teraz równocześnie na (3.1) i (3.2), widzimy,
że szukana hiperbola musi mieć równanie postaci
|
μ1-μ22σ2-σ1 2-2ρσ1σ2+σ2 2E-E02=const, |
|
przy czym w analizie portfelowej ciekawa jest tylko gałąź σ>0.
Trochę dodatkowych rachunków pozwala wyznaczyć wartość stałej po prawej
stronie,
|
μ1-μ22σ2-σ1 2-2ρσ1σ2+σ2 2E-E02=μ1-μ22σ1 2σ2 2σ1 2-2ρσ1σ2+σ2 21-ρ2. |
| (3.4) |
Gdy ρ=1 (więc ρ=-1 gdy σ1=σ2),
w (3.4) mamy dwie proste krzyżujące się w
0E0.
Gdy ρ<1, w (3.4) mamy hiperbolę w płaszczyźnie
R2σ,E, z półosiami długości
|
a=σ1σ21-ρ2σ1 2-2ρσ1σ2+σ2 2,b=μ1-μ2σ1σ2σ1 2-2ρσ1σ2+σ2 21-ρ2. |
| (3.5) |
W każdym z tych przypadków obrazy portfeli Markowitza (które nas chwilowo
jedynie interesują) to części wymienionych krzywych leżące w półpłaszczyźnie
σ≥0 i w poziomym pasie położonym między E=μ1 oraz E=μ2.
Skrajne wartościE0, gdy uzmienniamy parametrρ.
Podstawiamy w (3.3) ρ=-1:
|
E0-=E0-1=μ1σ22+μ2σ12+μ1+μ2σ1σ2σ1+σ22=σ2μ1+σ1μ2σ1+σ2σ1+σ22=σ2μ1+σ1μ2σ1+σ2, |
|
E0- jest więc punktem podziału wewnętrznego odcinka
o końcach μ1, μ2 w stosunku σ1:σ2.
Podstawiamy teraz w (3.3) ρ=+1:
|
E0+=E0+1=μ1σ2 2+μ2σ1 2-μ1+μ2σ1σ2σ1-σ22=σ2μ1-σ1μ2σ2-σ1σ2-σ12=σ2μ1-σ1μ2σ2-σ1, |
|
E0+ jest więc punktem podziału zewnętrznego odcinka
o końcach μ1, μ2 w stosunku σ1:σ2 (i nie
istnieje, gdy σ1=σ2, lecz ten przypadek od początku
wykluczyliśmy).
Obserwacja. 3.1.
Gdy ρ rośnie od -1 do 1, wtedy E0ρ dane wzorem (3.3)
zmienia się ściśle monotonicznie.
Prawa strona w (3.3) to funkcja homograficzna od ρ. Zapisujemy
ją inaczej, jak (być może) robiliśmy to już kiedyś na zajęciach z Funkcji
Analitycznych:
|
E0=μ1σ2 2+μ2σ1 2-μ1+μ2ρσ1σ2σ1 2-2ρσ1σ2+σ2 2 |
|
|
=μ1+μ2σ1 2-2ρσ1σ2+σ2 2+μ2-μ1σ1 2+μ1-μ2σ2 22σ1 2-2ρσ1σ2+σ2 2 |
|
|
=μ1+μ22+μ2-μ1σ1 2-σ2 22σ1 2-2ρσ1σ2+σ2 2. |
| (3.6) |
Ścisła monotoniczność E0ρ jest już teraz widoczna.
∎
Np w sytuacji na rysunku poniżej, mimo braku numeracji obrazów wierzchołków,
musi być albo μ1<μ2 i σ1<σ2, albo też μ1>μ2
i σ1>σ2, więc licznik ułamka w (3.6) przy
każdej z tych możliwych numeracji jest ujemny i E0ρ
ściśle maleje od E0- do E0+ [w wersji pdf Rysunek 3.4 przeskoczył
na następną stronę].
Obserwacja. 3.2.
Gdy σ1≠σ2, μ1≠μ2 i ρ rośnie od -1 do +1,
wtedy rozwartość kąta między asymptotami hiperboli (3.4) ściśle
rośnie od 2arctgμ2-μ1σ1+σ2 do
2arctgμ2-μ1σ2-σ1.
Według (3.5), tg12kąt rozwarcia asymptot=ba=μ2-μ1σ1 2-2ρσ1σ2+σ2 2 .
∎
Krytyczna wartość współczynnika korelacji.
Postawmy sobie pozornie uboczne pytanie, kiedy (tj dla jakiej
wartości ρ) E0=μ1, tzn. kiedy Me1=σ1μ1
jest czubkiem gałęzi hiperboli (3.4). Według (3.3),
|
μ2σ1 2-μ1+μ2ρσ1σ2=μ1σ1 2-2μ1ρσ1σ2, |
|
tzn.
|
μ2-μ1σ1 2=μ2-μ1ρσ1σ2, |
|
tzn. σ1σ2=ρ, przy czym równość σ1=σ2
jest tutaj wykluczona, bo oznaczałaby (dodatkowo) ρ=1.
Rozumując symetrycznie, E0=μ2 pociąga za sobą,
że ρ=σ2σ1<1.
Wniosek 3.1
Czubek gałęzi hiperboli (3.4) pokrywa się z jednym
z obrazów wierzchołków Δ2 wtedy i tylko wtedy, gdy
|
ρ(=ρkryt)=defmin{σ1σ2,σ2σ1}<1 . |
|
Krytyczna wartość współczynnika korelacji, zdefiniowana powyższym wzorem,
to bardzo ważne narzędzie w analizie portfelowej. Bywa ono pomocne w zupełnie
niespodziewanych sytuacjach, także w przykładach i zadaniach z ilością spółek
większą niż dwa (o czym studenci często nie pamiętają).
Ćwiczenie 3.5
Policzyć wartość ρkryt w przykładzie na Rysunku 3.4 powyżej.
Przykład 3.3
W przykładzie ,,5 stanów giełdy” z Wykładu II wartość współczynnika
korelacji ρAB jest właśnie krytyczna:
|
ρAB=covRA,RBσAσB=σB 2σAσB=σBσA=ρkryt. |
|
Ten efekt krytyczności ρAB widać wyraźnie na
Rysunku 2.1 w Wykładzie II: czubek gałęzi hiperboli jest tam
na wysokości 0.05 .
Definicja 3.1
Wartości -1≤ρ<ρkryt nazywamy
podkrytycznymi, natomiast wartości ρkryt<ρ≤1 nazywamy nadkrytycznymi.
W obu przykładach w Wykładzie I wartości współczynników korelacji
są podkrytyczne: w pierwszym można to sprawdzić bezpośrednim rachunkiem,
zaś w drugim kowariancja między stopami zwrotu jest ujemna.
Nasuwa się pytanie, które łuki hiperbol na Rysunku 3.4 powyżej
odpowiadają nadkrytycznym wartościom ρ ?