1.1. Stabilność w sensie Lapunowa i asymptotyczna stabilność
Najprostszą i pożądaną z punktu widzenia zastosowań własnością puktu równowagi jest jego stabilność. Poniżej podajemy dwie matematycznie ścisłe definicje stabilności.
Definicja 1.1. Punkt równowagi x∗ równania (1.1)
jest stabily w sensie Lapunowa, jeśli dla każdego ε>0 istnieje δ>0 takie, że każde rozwiązanie x=φt;x0;t0 startujące z δ-otoczenia
puktu x∗, x0-x∗<δ, pozostaje w ε-otoczeniu tego punktu, φt;x0;t0-x∗<ε, dla wszystkich czasów t>t0.
Punkt równowagi x∗ jest asymptotycznie stabilny, jeśli jest on stabilny w sensie Lapunowa i, dodatkowo, istnieje ε0>0 takie, że każde rozwiązanie φt;x0;t0 startujące z punktu x0=φt0;x0;t0 ε0-bliskiego punktowi równowagi, x0-x∗<ε0, dąży do x∗ przy t→∞.
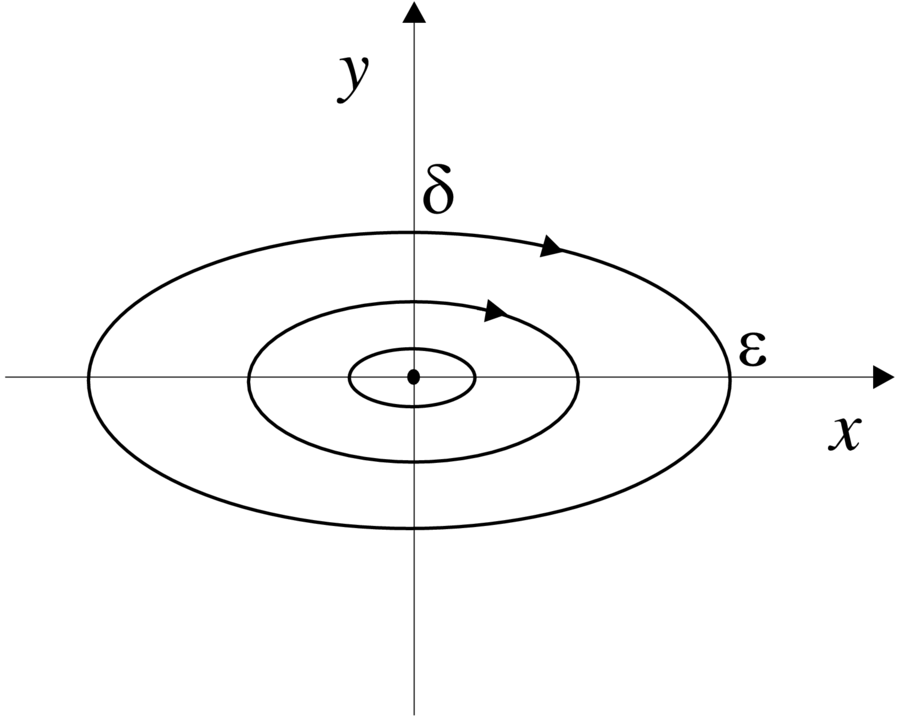
Przykład 1.2. Dla oscylatora harmonicznego x¨=-ω2x, albo
rozwiązania leżą w elipsach ωx2+y2=ε2 (patrz Rysunek 1.1). Stąd dla 0<ω≤1 wynika, że wybór δ=ωε spełnia warunki definicji stabilności w sensie Lapunowa. Ponieważ
rozwiązania nie dążą do punktu równowagi x=y=0, nie
jest on asymptotycznie stabilny.
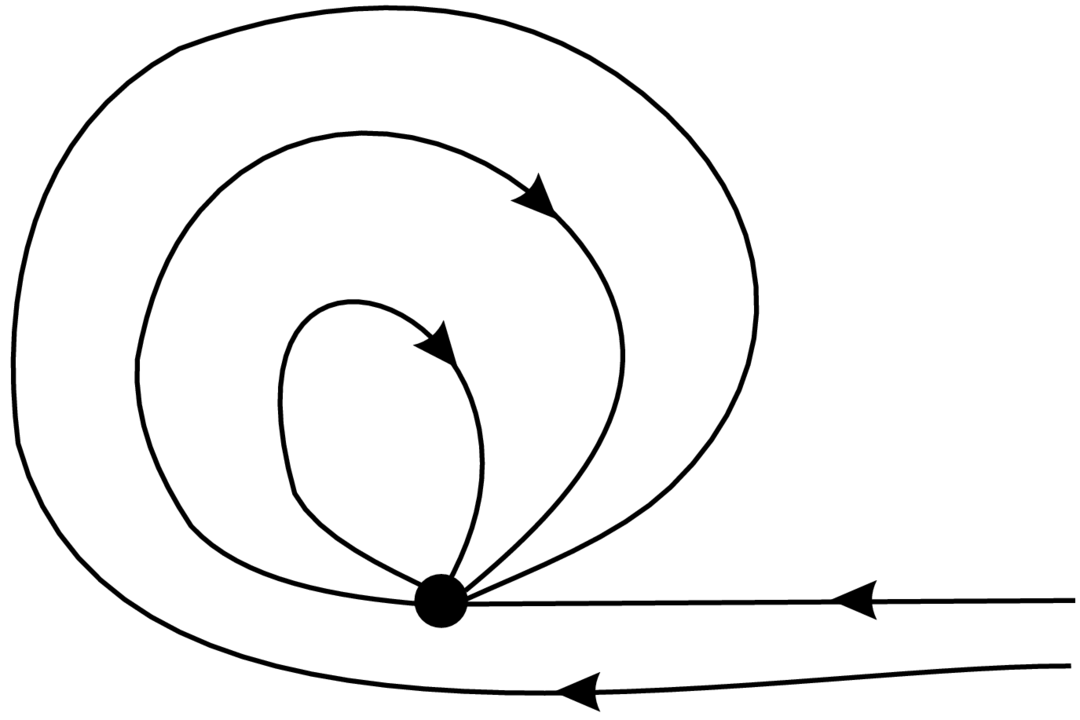
Przykład 1.3. Na Rysunku 1.2 przedstawiono portret fazowy pewnego
pola wektorowego, które ma tę własność, że każde
rozwiązanie dąży do punktu równowagi (czyli jest spełniony
drugi z warunków na stabilność asymptotyczną). Jednakowoż
ten punkt równowagi nie jest stabily w sensie Lapunowa, ponieważ
trajektorie starujące z dołu oraz dowolnie blisko punktu równowagi
wychodzą z czasem z ustalonego otoczenia tego punktu.
Okazuje się, że odpowiednie autonomiczne pole wektorowe można
zadać konkretnym wzorem. Mianowicie, ma ono postać
|
x˙=y,y˙=-2x2-4xy-yx2+y22 |
| (1.2) |
(patrz Zadanie 2.64).
Podstawowy wynik o stabilności punktów równowagi pochodzi od A.
Lapunowa. Dotyczy ono punktu równowagi x=0 dla kiełka
autonomicznego pola wetorowego w Rn,0 postaci
gdzie A=∂v∂x0 jest macierzą linearyzacji
pola w punkcie x=0.
Twierdzenie 1.4 (Lapunow). Jeśli macierz A ma własność, że części rzeczywiste wszystkich jej wartości własnych są ujemne,
to punkt równowagi x=0 jest asymptotycznie stabilny.
Zanim zaczniemy ścisły dowód tego twierdzenia wprowadzimy pojęcie funkcji Lapunowa, które okazuje się być użyteczne dla
pokazywania asymptotycznej stabilności nawet bez założenia (1.4).
Definicja 1.5.Funkcją Lapunowa dla punktu równowagi x=0 kiełka autonomicznego pola wektorowego vx nazywamy
funkcję
z otoczenia U punktu x=0, która spełnia następujące dwie
własności:
(i) Lx≥0 i Lx=0 tylko dla x=0;
(ii) L˙x=dLx,vx<0 dla x≠0.
Stwierdzenie 1.6. Jeśli istnieje funkcja Lapunowa (dla
punktu równowa- gi x=0 pola v(x)) to
ten punkt jest asymptotycznie stabilny.
Dowód. Własność (i) z definicji funkcji Lapunowa mówi, że zbioryLx≤c, c>0, są ograniczone i dążą do punktu x=0 przy c→0.
Własność (ii) oznacza, że jeśli x=φt jest rowiązaniem równania x˙=xx, to
|
ddtL∘φt=∂L∂xφt⋅φ˙t=▽Lx,vx=dLx,vx<0. |
|
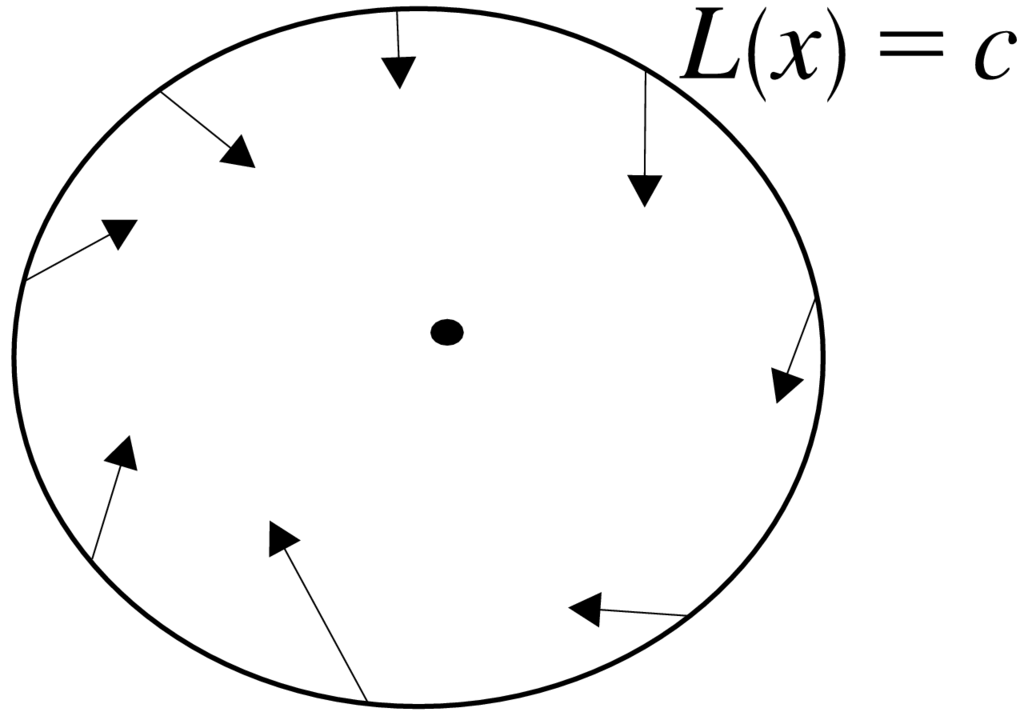
Widać, że funkcja Lapunowa maleje wzdłuż rozwiązań równania różniczkowego (patrz Rysunek 1.3).
Zatem rozwiązania startujące z brzegu Lx=c zbioru Lx≤c `wchodzą' do wnętrza tego
zbioru. Ponieważ te trajektorie pozostają w zbiorach L≤c, jest spełniony warunek stabilności w sensie Lapunowa. Z
drugiej strony, rozwiązania muszą dążyć do punktu x=0
przy t→∞; a to oznacza asymptotyczną stabilność. ∎
Teraz dla dowodu twierdzenia Lapunowa wypada skonstruować funkcję
Lapunowa. W tym celu poprawimy nieco macierz A. Po pierwsze, założymy, że jest ona w postaci Jordana. Zatem mamy klatki
|
λj10…000λj1…00………………000…λj1000…0λj, αj-βj10…βjαj01…00αj-βj…00βjαj………………, |
|
odpowiadające nierzeczywistym (λ1,…,λr) i
zespolonym (λj=λ¯j+1=αj+iβj, j=r+1,r+3,…,n-1) wartościom własnym.
Okazuje się, że jedynki nad diagonalą można zastąpić
małymi ε-ami. Rzeczywiście, jeśli mamy klatkę
Jordana wymiaru k z rzeczywistą wartością własną λ, to w standardowej bazie ej mamy
|
Ae1=λe1, Ae2=λe2+e1,…, Aek=λek+ek-1. |
|
Zatem dla bazy fj takiej, że
|
fk=ek, fk-1=ek-1/ε,…, f1=e1/εk-1, |
|
będziemy mieli Af1=f1 i Afj=λfj+εfj-1 j>1. Analogiczną zamianę stosujemy
w przypadku, gdy mamy klatkę Jordana z zepolonymi wartościami własnymi (Zadanie 1.27). Mamy zatem następujący
Lemat 1.7.W odpowiednim liniowym układzie współrzędnych macierz A przyjmuje postać
gdzie A0 jest blokowo-diagonalna zλj∈R i z αj-βjβjαj na diagonali a maciarz A1 jest ograniczona, A1<C1.
Następny lemat kończy dowód Stwierdzenia 1.6.
Lemat 1.8.Niech xi będzie układem współrzędnych z tezy Lematu 1.7. Wtedy funkcja
na odpowiednio małym otoczeniu pnktu x=0 jest funkcją Lapunowa dla tego punktu równowagi.
Dowód. Oczywiście wystarczy sprawdzić własność
(ii) z Definicji 1.5 funkcji Lapunowa. Mamy
|
L˙=▽L,A0x+ε▽L,A1x+▽L,v-Ax, |
|
gdzie ▽L=2x. Pierwszy wyraz po prawej stronie tej równości wynosi (jak łatwo sprawdzić)
|
▽L,A0x=2∑j=1rλjxj2+2∑αjxj2+xj+12, |
| (1.5) |
gdzie w drugiej sumie sumujemy po j=r+1,r+3,…,n-1. Następnie, z
ograniczoności A1 dostajemy
Poniewaz nieliniowe wyrazy pola vx-Ax są rzędu Ox2, mamy
|
▽L,v-Ax≤2C2x3≤2C2εx2 |
|
dla pewnej stałej C2 i dostatecznie małego x.
Warunek (1.4) z założenia twierdzenia Lapunowa oznacza, że w (1.5)
mamy
dla pewnego Λ. Zatem mamy ▽L,A0x<-2Λx2 a pozostałe dwa człony w L˙ szacują się przez 2C1+C2εx2. To pokazuje, że L˙<0 dla x≠0 i małego
ε, co kończy dowód lematu i twierdzenia Lapunowa.
∎
Istnieje twierdzenie odwrotne do twierdzenia Lapunowa. Jest ono dosyć
naturalne i przypuszczalnie Lapunow miał jego świadomość, ale
w rosyjskiej literaturze (np. w [10]) przypisuje się je V. Czetajewowi.
Twierdzenie 1.9 (Czetajew). Jeśli macierz A linearyzacji pola wektorowego (1.3) posiada wartość własną o
ściśle dodatniej części rzeczywistej, to punkt równowagi
x=0 nie jest stabilny (ani w sensie Lapunowa ani asymptotycznie).
Dowód. Niech Reλ1,…,Reλk będą ściśle dodatnie a Reλk+1,…,Reλk+l≤0, k+l=n. Możemy założyć, że
w rozkładzie Rn=Rk⊕Rl, przy
czym macierz A1 ma wartości własne λ1,…,λk a macierz A2 ma wartości własne λk+1,…,λn. Ponadto, możemy założyć, że macierze A1 i A2 są jak w tezie Lematu 1.7. Przyjmijmy jeszcze, że
x=x1,x2 w powyższym rozkładzie Rn
oraz x=x1+x2.
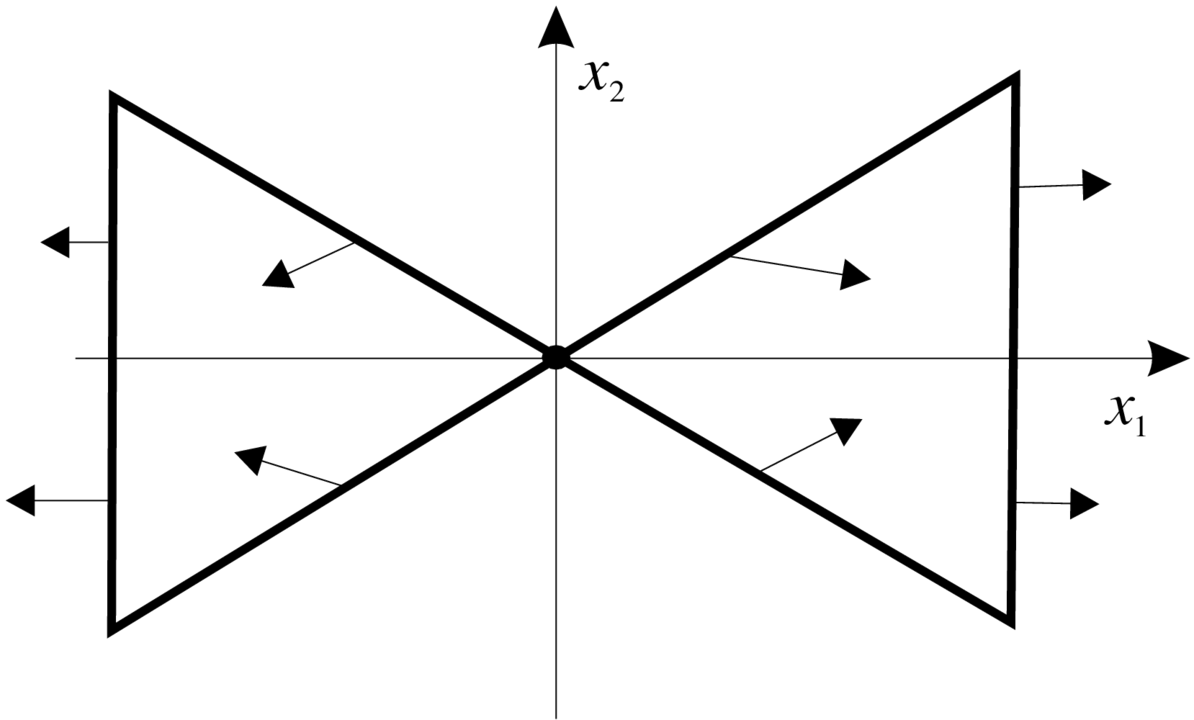
Zdefiniujmy stożek V za pomocą nierówności
gdzie stałe α i β będą zdefiniowanie w trakcie
dalszych etapów dowodu. Zauważmy, że brzeg ∂V stożka V składa się z dwóch części:
∂1V={|x2|=α|x1|} i ∂2V={|x1|=β}. Zdefiniujmy też `funkcję
Czetajewa', jako
Okazuje się, że przy odpowiednio dobranych α i β zachodzą następujące własności:
(a) pole wektorowe wchodzi do V na częsci ∂1V brzegu,
(b) C˙x>0 dla x∈V∖0.
Oczywiście, z nich wynika teza twierdzenia; trajektorie startujące
dowolnie blisko x=0 w V wychodzą z V przez część ∂2V brzegu (patrz Rysunek 1.4).
Aby udowodnić te własności, skorzystamy z nierówności (które są konsekwencją poczynionych założeń):
|
ddtx1>Mx1-εx, ddtx2<εx, |
|
(dla M=min{Reλj:1≤j≤l}) i małego ε, przy warunku, że x<β (β dostatecznie małe). Jak zwykle d/dt oznacza pochodną wzdłuż trajektorii xt pola wektorowego.
Warunek (a) oznacza, że ddtx1-αx2∂1V>0. Ale dla x1=αx2 mamy
|
ddtx1-αx2>Mx1-α+1εx=M-α+12εx1>0, |
|
o ile ε jest małe. Z drugiej strony dla x2≤αx1 mamy
∎
W związku z powyższymi twierdzeniami nasuwa się naturalne
praktyczne pytanie:
jak sprawdzić, czy wszystkie wartości własne danej macierzy mają ujemne częsci rzeczywiste?
Oczywiście to pytanie sprowadza się do pytania o części
rzeczywiste pierwiastków wielomianu charakterystycznego tej macierzy.
Zatem załóżmy, że mamy wielomian
|
Pλ=a0λn+a1λn-1+…+an, a0>0, aj∈R. |
| (1.6) |
Definicja 1.10. Mówimy, że wielomian Pλ jest
stabilny jeśli wszystkie jego zera λj mają ujemną część rzeczywistą.
Pytamy o warunki konieczne i dostateczne aby wielomian postaci (1.6) był stabilny. Okazuje się, że ten problem był badany już w XIX
wieku i ma pełne rozwiązanie.
Aby przyjrzeć się temu zagadnieniu, odnotujmy następujący
prosty warunek konieczny.
Lemat 1.11.Jeśli wielomian postaci (1.6) jest
stabilny, to aj>0 dla wszystkichj.
Dowód. Przyjrzyjmy się czynnikom w przedstawieniu
|
Pλ=a0∏λ-λj∏λ2-2αjλ+αj2+βj2, |
|
gdzie pierwszy iloczyn jest związany z rzeczywistymi pierwiastkami λj<0, a drugi iloczyn jest związany z nierzeczywistymi
pierwiastkami λj=αj±iβj, αj<0, βj≠0. Ponieważ każdy z czynników ma dodatnie współczynniki, to i cały wielomian też musi mieć dodatnie współczynniki. ∎
Uwaga 1.12. Jeśli stopień n≤2,to warunek aj>0,
j=0,1,2, jest również warunkiem dostateczym.
Zdefiniujmy następującą macierz wymiaru n×n:
|
M=a1a000…00a3a2a1a0…00a5a4a3a2…00…………………0000…an-1an-20000…0an |
| (1.7) |
taką, że na diagonali stoją kolejno liczby a1,a2,…,an.
Twierdzenie 1.13 (Warunki Raussa–Hurwitza).
Warunkiem
koniecznym i dostatecznym na stabilność wielomianu (1.6) jest:
(i) aj>0 dla wszystkich j;
(ii) minory główne Δj (wymiarów j) macierzy (1.7) są dodatnie.
Przykłady 1.14. Dla n=1 macierz (1.7) ma postać a1, zatem Δ1=a1.
Dla n=2, czyli macierzy a1a00a2, mamy Δ1=a1 i Δ2=a2; zatem odtwarzamy
Uwagę 1.12.
Dla n=3 mamy macierz
Warunki Raussa–Hurwitza przyjmują postać: Δ1=a1>0 (nic nowego),
i Δ3=a3Δ2 (też nic nowego).
Uwaga 1.15. Można pokazać, że warunek Δj>0 dla wszystkich j można zastąpić następującym warunkiem Liénarda–Shapira:
(patrz także poniższy dowód).
Dowód Twierdzenia 1.13. Idea dowodu jest dosyć prosta.
WarunkiReλj<0 (oraz a0>0) definiują
pewien podzbiór U w przestrzeni Rn+1=a współczynników aj. Zbiór U jest semi-algebraiczny i
jego brzeg składa się z gładkich `stratów'. Chodzi o równania definiujące te straty. Jeśli a∈∂U, to mamy dwie
możliwości: albo
(a) pewien pierwiastek równania Pλ=0 zeruje się,
albo
(b) para sprzężonych pierwiastków zespolonych leży na
osi urojonej.
Przypadek (a) oznacza, że P0=0, czyli an=0; to jest
dosyć proste.
Rozważmy sytuację z parą λj,j+1=±iβ
urojonych pierwiastków. Mamy wtedy
dla pewnego wielomianu
|
Q=b0λn-2+b1λn-3+…+bn-2, |
|
o którym możemy założyć, że jest stabilny. Ponadto, z
założenia indukcyjnego (względem n) możemy przyjąć,
że bj>0 i odpowiednie minory Δj=ΔjQ>0.
Mamy następujące relacje
|
a0=b0, a1=b1, a2=b2+β2b0, a3=b3+β2b1,… |
|
To oznacza, że macierz M w (1.7) ma pos
tać M=M1+β2M2, gdzie
|
M1=b1b00…000b3b2b1…000b5b4b3…000…………………000…bn-2bn-3bn-4000…00bn-2000…000, |
|
|
M2=000…000b1b001…000b3b2b1…000…………………000…bn-4bn-5bn-6000…bn-2bn-3bn-4000…00bn-2. |
|
Zauważmy, że r-ty wiersz macierzy M2 równa się r-1-temu wierszowi macierzy M1 dla r>1. To oznacza, że
wszystkie minory ΔjPβ, j=1,…,n-2, macierzy M są równe odpowiednim minorom ΔjQ dla macierzy M1 (związanej z wielomianem Q); zatem są one dodatnie. Stąd też wynika, że Δn-1Pβ=0 i ΔnPβ=β2bn-2Δn-1Pβ=0.
Widać, że równanie Δn-1P=0 opisuje lokalnie hiperpłaszczyznę w przestrzeni współczynników aj oddzielającą wielomiany stabilne od nie-
stabilnych. Wypada tylko sprawdzić, czy nierówność Δn-1Pβ>0 lokalnie definiuje zbiór wielomianów
stabilnych.
W tym celu rozważymy następującą deformację sytuacji
(1.9):
gdzie parametr α jest mały i β jest rzeczywiste. Wtedy do
macierzy M dochodzi jeszcze jeden człon α2M3, gdzie w
ostatnich dwóch wierszach macierzy M3 niezerowy jest tylko końcowy fragment wymiaru 2×2:
Gdy α i β są niezerowe wielomian Pα,β jest stabilny; zatem ΔjPα,β≠0 dla j=1,…,n-1. Policzmy granicę Δn-1Pα,β przy β→0 i stałym α≠0. (Wtedy ΔnPα,β→0, bo an=β2bn-2→0, ale to nam nie przeszkadza.) Łatwo zobaczyć, że dla β=0 i małego niezerowego α macierz M przyjmuje postać blokową, z blokami: M11 (wymiaru (n-2)×(n-2)), M12 (wymiaru (n-2)×2), M21=0 (wymiaru 2×(n-2)) i M22=α2N. Ponieważ detM11=Δn-2Pα,0 jest bliskie Δn-2P0,0=Δn-2Q>0 (z założenia indukcyjnego), więc i detM11>0. Zatem
|
Δn-1Pα,0=detM11⋅α2bn-2>0. |
|
∎
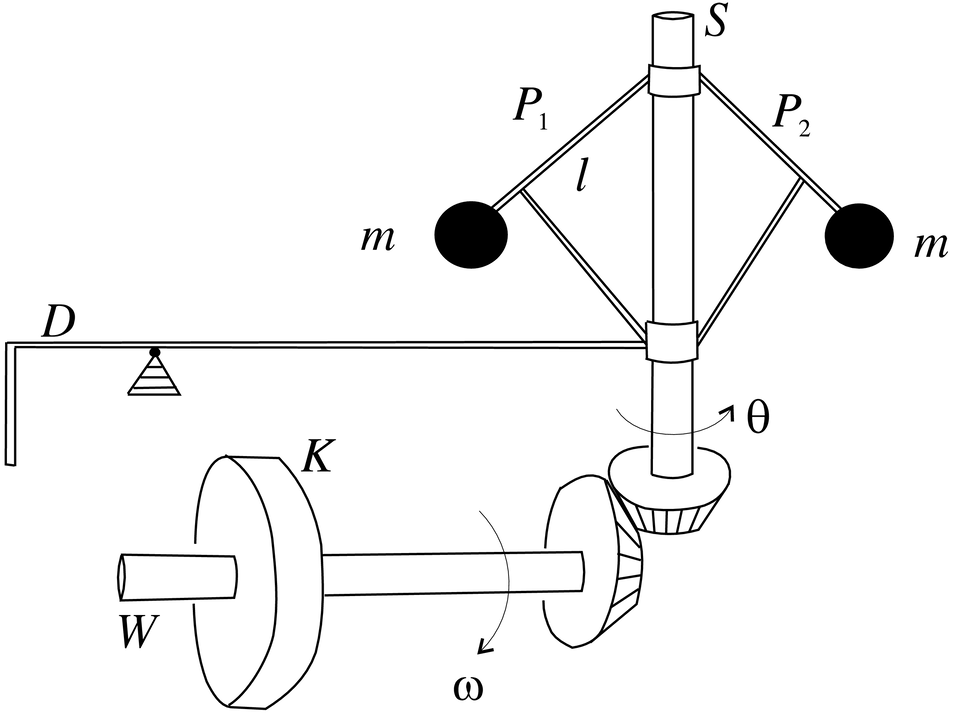
Przykład 1.16 (Regulator Watta). Na Rysunku 1.5 mamy przedsta-
wiony schemat regulatora Watta, stosowanego w XIX wieku w maszynach
parowych. Ten regulator składa się z:
— sworznia S, który może się obracać wokół swojej
osi;
— dwu kul o masie m każda, umieszczonych na ruchomych przegubach wokół sworznia S, tak, że górna obręcz jest nieruchoma
(scalona z S) a dolna obręcz może przesuwać się w górę i w dół (przy czym kule odpowiednio oddalają się od
sworznia i przybliżają do sworznia), ponadto pręty P1 i P2 łaczące kule z górną obręczą mają długość l;
— koła zamachowego K umieszczonego na walcu W;
— przekładni zębatej pomiędzy sworzniem S i walcem W o
stosunku prędkości obrotowych n;
— dźwigni D regulującej dopływ pary do maszyny i
przymocowanej do dolnej obręczy.
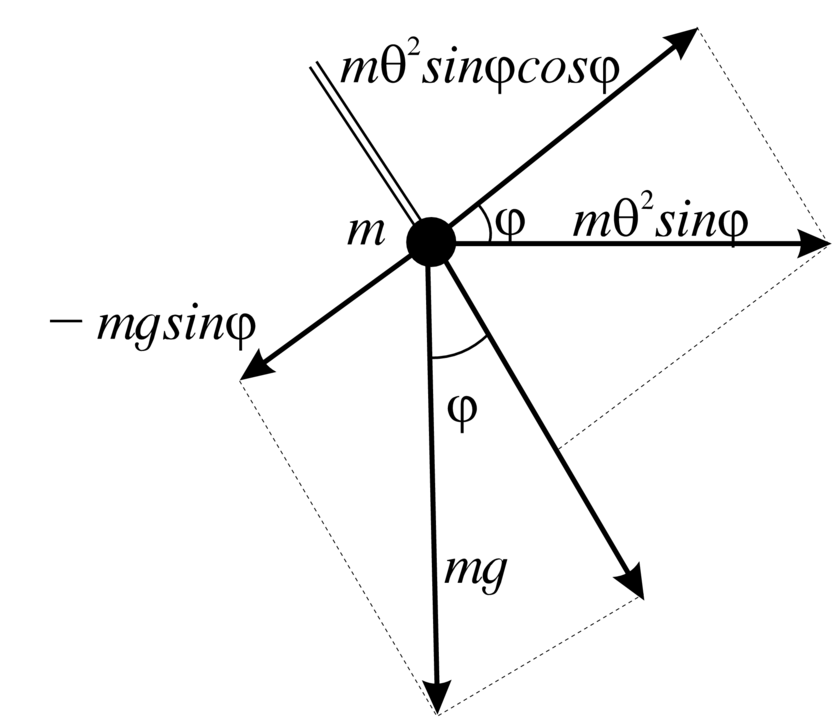
Na każdą kulę działają trzy siły (patrz Rusunek 1.6): siła odśrodkowa Fods´r=mlθ2sinφ
(skierowana prostopadle od sworznia na zewnątrz), siła ciężkości Fciez˙=mg (skierowana w dół) oraz tarcie Ftarc=-bφ˙ (prostopadłe do prętów P1,2). Tutaj θ
jest prędkością kątową obrotu sworznia S (i kul), φ jest kątem pomiędzy prętami P1,2 a sworzniem S, g jest przyspieszeniem ziemskim a b jest pewnym współczynnikiem. Sumując składowe tych sił prostopadłe do prętów P1,2, dostajemy następujące równanie ruchu
|
mlφ¨=mlθ2sinφcosφ-mgsinφ-bφ˙. |
| (1.10) |
Przy tym zwykle zakłada się (np. w [16]), że
tj. w pewnych jednoskach długości.
W równaniu (1.10) oprócz dynamicznej zmiennej φ występuje jeszcze wielkość θ, która także zmienia się
z czasem. Aby dostać jakąś zależność θ (lub
jej pochodnych) od φ, uwzględnijmy najpierw jej związek
z prędkością obrotową ω walca W. Z drugiej strony,
ruch koła zamachowego K opisuje się równaniem
gdzie J jest momentem bezwładności koła, natomiast po prawej
stronie mamy moment siły działającej na koło. Przy tym składnik kcosφ jest proporcjonalny do ilości dopływu pary (k jest pewną stałą) a F jest stałą spowalniającą siłą związaną z pracą wykonywaną przez maszynę. Z
powyższych rozważań wynika następujący zamknięty i
autonomiczny układ równań różniczkowych dla x=φ, y=φ˙ i z=ω:
|
x˙=y,y˙=n2z2sinxcosx-gsinx-bmy,z˙=kJcosx-FJ, |
| (1.11) |
Okazuje się, że ten układ ma dokładnie jedno (fizycznie
realizowalne) położenie równowagi x0,y0,z0 zadane równaniami
|
cosx0=F/k, y0=0, n2z02=g/cosx0. |
| (1.12) |
Ponadto macierz linearyzacji układu (1.11) w tym punkcie równowagi
jest następująca
|
A=010-gsin2x0cosx0-bm2gsinx0z0-kJsinx000 |
| (1.13) |
a jej wielomian charakterystyczny to
|
detA-λ=-Pλ=-λ3+bmλ2+gsin2x0cosx0λ+2kgsin2x0Jz0. |
| (1.14) |
Widać, że współczynniki wielomianu Pλ są
dodatnie, czyli jest spełniony warunek (i) Twierdzenia Raussa–Hurwiza. Dzięki Przykładowi 1.14 (dla n=3) warunkiem dostatecznym stabilności wielomian Pλ jest nierówność (1.8), która w
tym przypadku oznacza
|
bJm>2kcosx0z0=2Fz0 |
| (1.15) |
(Zadanie 1.28). Tutaj ν:=z0/2F=ω0/2F ma mechaniczną
interpretację nierównomierności pracy maszyny. Zatem
ostatnia nierówność przyjmuje prostą postać
Można stąd wysnuć następujące wnioski:
— zwiększanie masy m kul pogarsza stabilność;
— zmniejszanie współczynnika tarcia b pogarsza stabilność;
— zmniejszenie momentu bezwładności J koła zamachowego
pogarsza stabilność;
— podobny wpływ ma zmniejszenie współczynnika ν nierównomierności pracy maszyny.
1.2. Hiperboliczność
Wyniki poprzedniego rozdziału nauczyły nas, że warunek Reλj=0, dla pewnej wartości własnej macierzy linearyzacji A
w punkcie równowagi autonomicznego pola wektorowego
|
z˙=Az+…, z∈Rn,0, |
| (1.16) |
jest warunkiem granicznym dla roztrzygnięcia problemy stabilności
asymptotycznej tego punktu równowagi. Stąd pojawia się następująca
Definicja 1.17. Punkt równowagi z=0 autonomicznego pola
wektorowego (1.16) nazywa się punktem hiperbolicznym, jeśli
części rzeczywiste wszystkich wartości własnych macierzy A
linearyzacji pola w tym punkcie są niezerowe.
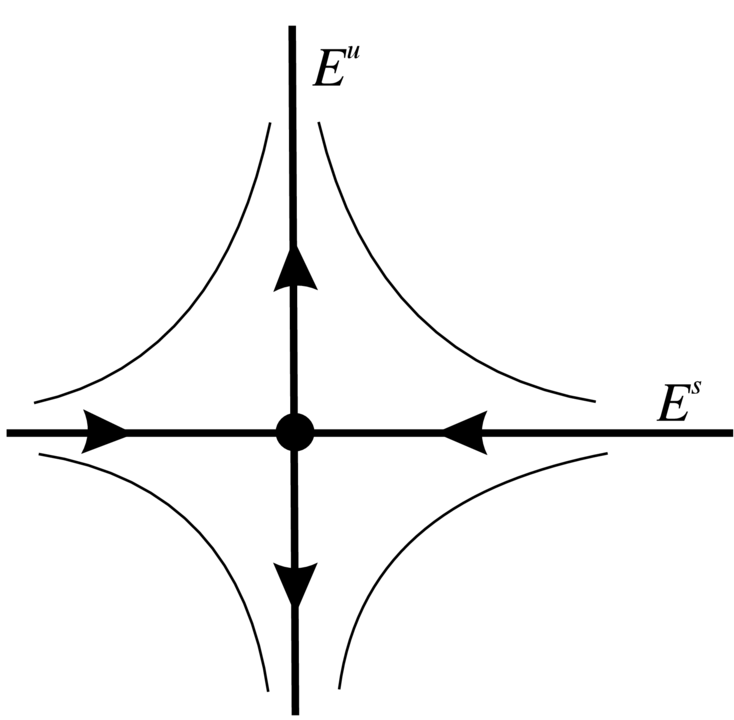
Załóżmy, że punkt z=0 jest hiperboliczny i rozważmy
odpowiedni układ liniowy
Wtedy istnieje naturalny rozkład przestrzeni Rn na sumę
prostą podprzestrzeni stabilnej Es≃Rk i
podprzestrzeni niestabilnej Eu≃Rl (od angielskich słów `stable' i `unstable'), odpowiadających wartościom własnym z Reλj<0 i z Reλj>0 odpowiednio:
|
Rn=Es⊕Eu, A=A1⊕A2. |
| (1.18) |
Zauważmy, że podprzestrzenie Es i Eu można zdefiniować topologicznie w terminach liniowego potoku fazowego gAzt=eAt
liniowego pola (1.17) (patrz Dodatek). Mianowicie
|
Es=z:gAztz→0, t→+∞, Es=z:gAztz→0, t→-∞ |
|
(patrz Rysunek 1.7).
Okazuje się, że analogiczna sytuacja ma miejsce w przypadku
nieliniowego pola (1.16).
Twierdzenie 1.18 (Hadamard–Perron). Dla hiperbolicznego
punktu równowagi z=0 pola z˙=vz klasy Cr, r≥2, istnieją lokalne podrozmaitości, stabilna Ws i niestabilna Wu klasy Cr, takie, że
|
Ws=z:gvtz→0, t→+∞, Ws=z:gvtz→0, t→-∞, |
| (1.19) |
oraz
|
T0Ws=Es, T0Wu=Eu. |
| (1.20) |
Zanim zabierzemy się za dowód tego twierdzenia, zauważmy, że
analogiczne pojęcia i twierdzenia można wprowadzić dla
lokalnych dyfeomeorfizmów. Po pierwsze, jeśli z=0 jest punktem równowagi pola wektorowego z˙=vz=Az+…, to z=0 jest
punktem stałym przekształcenia potoku po czasie t=1, fz=gv1z, tzn.
Ponadto część liniowa ∂f∂zz
przekształcenia f w z=0 ma postać macierzy
(Zadanie 1.36). W istocie istnieje dyskretna wersja pojęcia potoku
fazowego.
Definicja 1.19. Dyfeomorfizm f:M⟼M definiuje
homomorfizm Z→DiffM z grupy addytywnej liczb całkowitych do grupy dyfeomeorfizmów rozmaitości tak, że
gdzie fn=f∘…∘f (n razy dla n≥0) i f-n=f-1∘…∘f-1 (n razy
dla n<0). W literaturze fn nazywa się kaskadą.
Punkt z0∈M jest punktem okresowym o okresie p≥1 dla f, jeśli fpz0=z0; przy tym pod okresem będziemy
rozumieli minimalny okres (tzn. fqz0≠z0 dla 1≤q<p).
Oczywiście punkt okresowy o okresie p=1 jest punktem stałym.
Definicja 1.20. Punkt okresowy z0 o okresie p dyfeomorfizmu
f nazywa się hiperbolicznym, jeśli macierz
ma wszystkie wartości własne poza okręgiem jednostkowym,
Lemat 1.21.Jeśli z=0 jest hiperbolicznym
punktem równowagi pola wektorowego vz to z=0 jest też hiperbolicznym punktem stałym dyfeomorfizmu f=gvt, i odwrotnie (Zadanie 1.36).
Mamy następującą wersję twierdzenia Hadamarda–Perrona dla
dyfeomorfizmów.
Twierdzenie 1.22.Jeśli punkt stały z=0lokalnego dyfeomorfizmuf:Rn,0⟼Rn,0 klasy Cr, r≥1, jest hiperboliczny, to istnieją lokalne
podrozmaitości, stabilna Ws i niestabilna Wu klasy Cr, takie, że
|
Ws=z:fnz→0, n→+∞, Ws=z:fnz→0, n→-∞, |
| (1.21) |
oraz
|
T0Ws=Es, T0Wu=Eu, |
| (1.22) |
gdzie Es i Eu są podprzestrzniamiRn rozpiętymi przez podprzestrzenie własne
odpowiadające wartościom własnym macierzy B=∂f∂z0 o module <1 i >1 odpowiednio.
Droga do dowodu Twierdzenia Hadamarda–Perrona 1.18 wiedzie poprzez dowód Twierdzenia 1.22. Przy tym, jak się wkrótce przekonamy, metoda
dowodu istnienia podrozmaitościi Ws i Wu o własnościach (1.21) klasy C0 jest dosyć naturalna: dostaje się równanie na punkt stały pewnego przekształcenia w odpowiedniej nieskończenie wymiarowej przestrzeni Banacha. Niestety `wyciśnięcie'
warunku kontrakcji tego przekształcenia jest mocno wyczerpujące.
Dlatego w poniższym dowodzie ograniczymy się do wyprowadzenie
odpowiednich równań i naszkicujemy ogólny schemat
oszacowań. Po ścisły dowód odsyłamy czytelnika do monografii
W. Szlenka [18].
Dowód Twierdzenia 1.22. Dla uproszczenia sytuacji załóżmy rozkład(1.18), czyli Rn=Es⊕Eu=x,y i przekształcenie w postaci f=f1,f2 takie, że
|
f1x,y=Ax+φx,y, f2x,y=By+ψx,y, |
| (1.23) |
gdzie
oraz funkcje φ i ψ są rzędu ox+y (Zadanie 1.37).
Oczywiście wektorowe funkcje φ i ψ są określone w małym otoczeniu zera. W dowodzie, który predstawiamy poniżej, stanowi to pewną techniczną przeszkodę. Dlatego dokonamy następującej zamiany
gdzie funkcja χx,y jest gładka (klasy C∞) i taka, że:
(i) χx,y≡1 w małym otoczeniu zera, x+y<ε;
(ii) χx,y≡0 poza małym otoczeniem zera, x+y>2ε (Zadanie 1.38).
Zatem funkcje φχ i ψχ po przedłużeniu zerem
dla x+y>ε będą określone na całym Rn. Dalej oznaczamy je przez φ i ψ. Przypomnijmy, że te nowe funkcje spełniają dφ0,0=0, dψ0,0=0 oraz φ i ψ są małe wraz z pochodnymi. Dzięki własności (i) dynamika przekształcenia f z nowymi φ i ψ w otoczeniu zera jest taka sama jak dla starego przekształcenia
(1.23).
Poszukujemy podrozmaitości Ws w postaci wykresu pewnego
odwzorowania (lub funkcji wektorowej) F:Es⟼Eu,
(Dowód istnienia podrozmaitości Wu przebiega zupełnie
analogicznie, dlatego ograniczamy się do przypadku Ws.)
Z własności (1.21) wynika, że podrozmaitość Ws
powinna być niezmiennicza względem dyfeomorfizmu f, fWs=Ws. To oznacza, że fx,Fx=x1,Fx1 dla
pewnych x1∈Es zależnych od x∈Es. Z (1.23)
znajdujemy, że x1=Ax+φx,Fx. Zatem dostajemy warunek
|
BF(x)+ψ(x,F(x))=F∘(Ax+φ(x,F(x)), |
|
który przepiszemy w następującej postaci
|
F(x)=B-1{F∘(Ax+φ(x,F(x))-ψ(x,F(x))}=:T(F)(x). |
| (1.25) |
Traktujemy ostatnie równanie jako równanie punktu stałego F=TF dla nieliniowego operatora T definiowanego przez
prawą stronę tej równości.
Zakładając, że funkcje φ i ψ są klasy C1,
naturalne jest wprowadzić przestrzeń Banacha X=C0Es,Eu odwzorowań ciągłych z normą supremum.
Nietrudno też pokazać, że przekształcenie T
przeprowadza X w siebie. Aby zastosować zasadę Banacha
dla odwzorowań zwężających, należałoby jeszcze
udowodnić warunek kontrakcji, czyli oszacować normę różnicy TF1-TF2. Tutaj pojawia się
problem, bo z (1.25) dostajemy następującą nierówność:
|
| | TF1-TF2 |
|
|
| ≤ | B-1+B-1⋅F1′⋅φy′+B-1⋅ψy′⋅F1-F2 |
|
(Zadanie 1.39). Ponieważ B-1<1 (patrz
(1.24)) oraz ψy′=∂ψ/∂y i ∂φ/∂y są małe (patrz powyżej), to wypada tylko umieć
oszacować normę pochodnej F1′ odwzorowania F1.
Ale, jeśli wybieramy F1 i F2 dowolnie z przestrzni X, to F1 będzie tylko ciągłe, a jego pochodna może być nieograniczona.
Jest wyjście z tego impasu. Przypomnijmy, że w dowodzie twierdzenia
Banacha wybiera się F0∈X, a następnie punkty Fn=TnF0 powinny zbiegać do punktu stałego.
Chodzi o to aby wybrać wektorową funkcję F0 gładką i
pokazać, że funkcje Fn też są gładkie z odpowiednio
ograniczonymi normami. Nietrudno zgadnąć, że
jest dibrym wyborem. Łatwo też widać ze wzoru (1.24), że Fnx są gładkie, np. F1x=-B-1ψx,0.
Trzeba tylko pokazać, że funkcje Fnx są jednakowo ciągłe. To sprowadza się do oszacowania normy pochodnej TF′x przy założeniu, ograniczoności
normy F′x. Mamy
|
TF′x=B-1⋅F′⋅A+φx′+φy′⋅F′-ψx′-ψy′⋅F′, |
| (1.26) |
gdzie pominęliśmy argumenty funkcji występujących po prawej
stronnie tej równości. Zatem norma supremum szacuje się następująco:
gdzie a jest małe, b<1 i c>0. Stąd wynika, że, jeśli F′ jest dostatecznie mała, F′<d (dla odpowiedniego d), to i TF′<d (Zadanie 1.40). To daje równomierne oszacowanie dla norm Fn′ ciągu funkcji Fn.
Zatem Fn zbiegają do punktu stałego F∗, o którym na
razie możemy powiedzieć tylko że jest reprezentowany przez ciągłe odwzorowanie z Es do Eu; czyli, że podrozmaitość
jest klasy C0.
Powiemy krótko, jak dowieść gładkości funkcji F∗. W tym celu należy stosować jednocześnie równania (1.25) i
(1.26) do ciągów Fn i Fn′. W szczególności, pokazuje się jednakową ciągłość rodziny Fn′, co wymaga
jednostajnego szacowania wyrażenia supTFn′x1-TFn′x2.Okazuje się, że to daje się zrobić korzystając z oszacowań dlasup{|Fn′(x1)-Fn′(x2)|, φ′x1,y1-φ′x2,y2, |ψ′(x1,y1)-ψ′(x2,y2)|}.
Następnie korzysta się z twierdzenia Ascoliego, które mówi,
że z jednakowo ciągłego ciągu funkcji na zwartym zbiorze można wybrać podciąg zbieżny. Tutaj zbiór zwarty to {|x|<M}⊂Es dla pewnego M a
granicą podciągu Fnk musi być F∗ (bo taka jest granica w przestrzeni funkcji ciągłych).
W tym (skróconym) dowodzie ograniczyliśmy się do przypadku, gdy f jest klasy C1 (i wtedy Ws,u są też klasy C1). Ale
przypadek klasy Cr dla r>1 też da się udowodnić, i to tą samą metodą, tylko dowód wymaga większej liczby wzorów i oszacowań. Pomijamy go.
Na koniec zauważmy, że ponieważ F0′0=0 i φ′0,0=0 i ψ′0,0=0, to mamy Fn′0=0 dla dowolnego n. Zatem F∗′0=0,
co oznacza, że podrozmaitość Ws jest styczna w punkcie 0,0 do przestrzeni Es. ∎
Dowód Twierdzenia 1.18. Połóżmy f=gv1, czyli
przekształcenie potoku fazowego po czasie t=1 i niech Vs będzie lokalną rozmaitością stabilną dla f (patrz
Twierdzenie 1.22). Ponieważ podrozmaitość Ws jest
definiowana topologicznie jako zbiór tych punktów z, że gvtz→0 gdy t→∞, to Ws⊂Vs. Z drugiej strony, jeśli z∈Vs, to zapisując t=n+τ dla n∈N i 0≤τ<1, mamy gtz=gτgnz→0 (jako, że rodzina gττ∈0,1 jest jednakowo ciągła). ∎
Drugi podstawowy wynik dotyczący hiperbolicznych punktów stałych
pochodzi od D. Grobmana i P. Hartmana ([13]). Formułujemy go jednocześnie dla kaskad i potoków.
Twierdzenie 1.23 (Grobman–Hartman). Niech f:Rn,0⟼Rn,0 będzie kiełkiem dyfeomorfizmu klasy Cr, r≥1, z hiperbolicznym punktem stałym w z=0. Wtedy
istnieje lokalny homeomorfizm h:Rn,0⟼Rn,0 taki, że
Analogicznie, dla lokalnego potoku gvt generowanego przez kiełek pola wektorowego vz z
hiperbolicznym punktem równowagi z=0 istnieje lokalny
homeomorfizm h (jak wyżej) taki, że
|
h∘gvtz=etv′0⋅hz. |
| (1.28) |
Dowód. Zaczniemy od przypadku kaskady. Podobnie jak w przypadku
dowodu Twierdzenia 1.22 sprowadzamy sytuację do przypadku, gdy z=x,y i
|
fx,y=Ax+φ,By+ψ=Lz+f~, |
|
gdzie L=A⊕B=f′0, zachodzą oszacowania (1.24) i f~=φx,y,ψx,y jest określone na całym Rn=Es⊕Eu oraz jest małe wraz z pochodnymi.
Homeomorfizm h wybierzemy w postaci
|
h=id+g=x+g1,y+g2, g małe. |
| (1.29) |
Równanie (1.27) na h, które odnacza przemienność następującego diagramu
prowadzi do równania id+g∘L=L⋅id+g+f~∘id+g. W składowych dostajemy układ równań
|
g1Ax,By=A⋅g1x,y+φx+g1,y+g2,g2Ax,By=B⋅g2x,y+ψx+g1,y+g2. |
|
Przepiszmy ten układ w dogodnej dla nas formie
|
g1x,y=A⋅g1A-1x,B-1y+φ∘id+g∘A-1x,B-1y,g2x,y=B-1⋅g2Ax,By-B-1⋅ψ∘id+g. |
| (1.30) |
Łatwo rozpoznać tu równanie punktu stałego g=Tg
dla nieliniowego operatora T działającego nag=g1,g2 poprzez prawe strony układu (1.30).
Jako przestrzeń Banacha wybierzemy
z normą g=supg1+supg2. Tutaj już nietrudno pokazać, że
operator T przekształca kulę w X o odpowiednim
promieniu w siebie i że jest kontrakcją. Podstawowy argument polega
na tym, że macierze A i B-1 mają normę <1.
Oderwijmy się na moment od naszego dowodu i rozważmy sytuację,
gdy równanie (1.27) zastąpić równaniem
gdzie k:Rn⟼Rn. Po podstawieniu k=id+l=x+l1,y+l2 i pewnych przekształceniach otrzymujemy następujący analog układu (1.30)
|
l1x,y=Al1∘f-1x,y-φ∘f-1x,y,l2x,y=B-1l2x,y+B-1ψx,y. |
|
Tutaj też mamy do czynienia z równaniem punktu stałego dla
odpowiedniego przekształcenia S:X⟼X, które jest zwężające. Zatem również układ
(1.31) ma rozwiązanie.
Odnotujmy następującą własność rozwiązań równań (1.27) i (1.31), które są konsekwencją faktu, że w
tezie twierdzenia Banacha o punkcie stałym przekształcenia zwężającego w przestrzeni Banacha tenże punkt stały zależy w sposób ciągły od parametrów (o ile samo przekształcenie zależy od parametrów w sposób ciągły):
Rozwiązania hx,y i kx,y równań (1.27) i (1.31) są jednoznaczne i zależą w sposób ciągły od danych występujących w tych równaniach (czyli od L=A⊕B if~=(φ,ψ)). Ponadto w równaniu (1.27) możemy zastąpić liniowe przekształcenie L=f′0 dowolnym przekształceniem g takim,
żeg′0=L.
Wyżej wspomniana jednoznaczność pozwoli nam na udowodnienie,
że przekształcenia h i k są homeomorfizmami; dokładniej,
że h∘k=k∘h=id. Rzeczywiście, przekształcenie m=k∘h spełnia warunek m∘L=L∘m, czyli równanie
(1.27) dla f=L. Ponieważ również przekształcenie tożsamościowe też spełnia to równanie, to z jednoznaczności mamy m=id. Analogicznie, przekształcenia n=h∘k i id spełniają
równanie f∘n=n∘f.
Przejdźmy teraz do dowodu drugiej części twierdzenia, czyli
isnienia homeomorfizmu h, który spełnia jendocześnie wszystkie równania typu (1.27) dla rodziny przekształceń ft=gvt, v=Az+…. Dla t≠0 przekształcenia ft mają
hiperboliczny punkt stały z=0. Zatem z udowodnionej już pierwszej części twierdzenia mamy istnienie rodziny homeomorfizmów ht, t≠0, takich, że
Trzeba jeszcze tylko pokazać, że ht nie zależą od t,
który tutaj traktujemy jako parametr. Przynajmniej wiemy, że ht
zależy od t w sposób ciągły.
Zauważmy teraz następującą tożsamość
|
ht/2∘ft∘ht/2-1=ht/2∘ft/2∘ht/2-1∘ht/2∘ft/2∘ht/2-1=eAt/2∘eAt/2=eAt |
|
(tutaj wykorzystaliśmy grupową własność potoku fazowego).
Oznacza ona, że ht/2=ht (jednoznaczność). Analogicznie
dowodzi się, że ht/k=ht dla naturalnego k i stąd,
że
(Zadanie 1.41). Widać, że dla wymiernego zbioru parametrów t przekształcenia ht są takie same. Z ciągłej zależności ht of parametru (patrz wyżej) wynika, że ht≡const jako funkcja od t>0. Teraz obserwacja, że jeśli h spełnia równanie (1.28) dla danego czasu t>0, to spełnia to równanie też dla czasu -t (Zadanie 1.42) kończy dowód.
Na koniec jeszcze jedna uwaga. Ponieważ gvt
jest tylko lokalnym potokiem fazowym (dla pola wektorowego vz określonego w otoczeniu z=0) to trzeba zatroszczyć się o dziedziny
przekształceń potoku, i tym samym, o dziedziny przkształceń ht. Ale tu nie ma problemu, bo dziedzina przekształcenia gvt/k zwiększa się ze wzrostem k∈N. Wystarczy w powyższym dowodzie ograniczyć się do czasów takich , że t<1. ∎
Własność (1.27) oznacza, że dynamika (tj. kaskada) generowana
przez dyfeomorfizm f jest taka sama, z jakościowego punktu widzenia
jak dynamika generowana przez dyfeomorfizm liniowy Lz=f′0z. Rzeczywiście, jeśli …,f-1z0,z0,fz0,f2z0,… jest orbitą
punktu względem dyfeomorfizmu f i y0=hx0, to …,L-1y0,y0,Ly0,… jest orbitą
punktu y0 względem liniowego dyfeomorfizmu L.
Następująca definicja wydaje się naturalna.
Definicja 1.24. Jeśli dla dyfeomorfizmów f:M⟼M i g:N⟼N istnieje homeomorfizm h:M⟼N taki, że
to mówimy, że dyfeomorfizmy f i g są topologicznie
sprzężone (przy pomocy h). Jeśli h jest klasy Cr,
to mówimy o sprzężeniu klasy Cr. Podobnie, pola
wektorowe vx i wx są topologicznie (lub klasy Cr) sprzężone, jeśli ich potoki fazowe są sprzężone
przy pomocy homeomorfizmu (lub odpowiednio dyfeomorfizmu klasy Cr).
Jeśli dyfeomorfizm f ma własność, że dowolny
dyfeomorfizm g, który jest bliski f (w pewnej klasie, której
tutaj nie chcemy uściślać) jest topologicznie sprzężony
z f, to mówimy, że f jest strukturalnie stabilny.
Podobnie, pole wektorowe vx jest strukturalnie stabilne jeśli bliskie pola są topologicznie sprzężone z nim.
Twierdzenie Grobmana–Hartmana mówi, że dyfeomorfizm (odpowiednio
pole wektorowe) w otoczeniu hiperbolicznego punktu stałego (odpowiednio
hiperbolicznego punktu równowagi) jest topologicznie sprzężone z
częścią liniową dyfeomorfizmu (odpowiednio pola). Możemy
udowodnić więcej.
Stwierdzenie 1.25.Dyfeomorfizm (odpowiednio pole
wektorowe) w otoczeniu hiperbolicznego punktu stałego (odpowiednio
hiperbolicznego punktu równowagi) jest strukturalnie stabilny.
Dowód. Użyjemy następującej bezpośredniej
konstrukcji homeomorfizmu h, który sprzęga dwa dyfeomorfizmy f i g w przypadku asymptotycznie stabilnym, tzn. takim, że f′0 i g′0 mają wszystkie wartości własne o module <1. Można założyć, że Es=Rn i z=x w
dowodzie twierdzenia Grobmana–Hartmana. Wtedy istnieje `funkcja Lapunowa', Lx tzn. spełniająca warunek (i) Definicji 1.5 i następujący
analog warunku (ii):
Jej konstrukcja jest zpełnie analogiczna jak w dowodzie Twierdzenia
Lapunowa; możemy założyć, że Lx=x2 w odpowiednim (liniowym) układzie współrzędnych. Niech Mx=x2 będzie odpowiednią funkcją
Lapunowa dla dyfeomorfizmu g (też w odpowiednim układzie współrzędnych). Mamy dwa egzemplarze Rn, na których działają odpowiednio dyfeomorfizmy f i g.
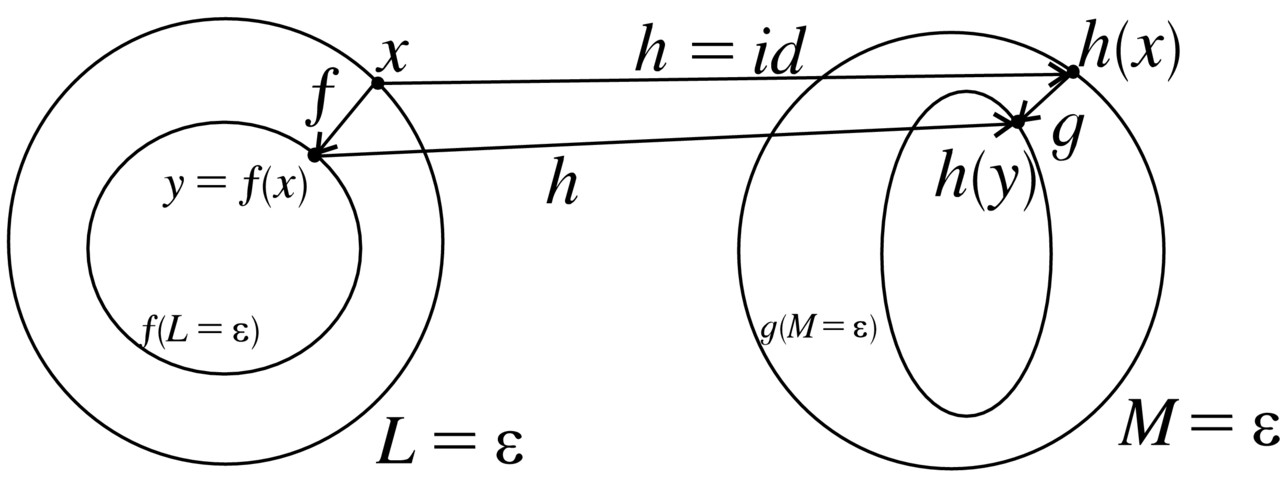
Wybierzmy małe ε>0 i rozważmy hiperpowierzchnie
(dyfeomorficzne ze sferami) Lx=ε i Mx=ε. Zdefiniujmy homeomorfizm h pomiędzy
tymi hiperpowierzchniami jako h|L=ε=id:{L=ε}⟼{M=ε} (patrz Rysunek 1.8). Warunek
pozwala 'dookreślić' przekształcenie h pomiędzy
hiperpowierzchniamif({L=ε}) i g({M=ε}), jak na Rysunku 1.8. Przedłużmy h w sposób ciągły i wzajemnie jednoznaczny do
obszaru pomiędzy hiperpowierzchniami L=ε i
f({L=ε}). Stosując
wielokrotnie równanie (1.32) przedłużamy h do całego
obszaru 0<L≤ε. Kładąc h0=0
dostajemy poszukiwany homeomorfizm.
Zupełnie analogiczna konstrukcja pracuje w przypadku dyfeomorfizmów
rozszerzających, tzn. gdy macierze f′0 i g′0
mają wartości własne o module >1.
Rozważmy teraz dwa dyfeomorfizmy liniowe f0 i g0 definiowane
przy pomocy hiperbolicznych macierzy A=As⊕Au i B=Bs⊕Bu w odpowiednich (i takich samych) rozkładach Rn=Es⊕Eu. Z powyższych rozważań dostajemy
homeomorfizmy hs i hu, które sprzęgają Asx z Bsx i Auy z Buy odpowiednio. Teraz homeomorfizm
sprzęga f0 z g0.
Rozważmy teraz dyfeomorfizm f w otoczeniu hiperbolicznego punktu stałego z=0 i jego małe zaburzenie g z tym samym punktem stałym. Ponieważ macierz B=g′0 jest bliska macierzy A=f′0 to
też jest hiperboliczna z takimi samymi wymiarami podprzestrzeni
stabilnej i niestabilnej; czyli możemy zastosować powyższą
konstrukcję homeomorfizmu sprzęgającego części liniowe
tych dyfeomorfizmów. Widzimy, że f jest sprzężony z f0=f′0z, f0 jest sprzężony z g0=g′0z i g0 jest sprzęzony z g; składając te trzy
homeomorfizmy dostaje się sprzężenie f z g.
Przypadek Stwierdzenia 1.25 dla pól wektorowych pozostawiamy słucha-
czom jako ćwiczenie (Zadanie 1.43). ∎
Uwaga 1.26. Można zapytać, czy nie można wzmocnić
tezy twierdzenia Grobmana-Hartmana, tzn. czy homeomorfizm h może być klasy C1. Okazuje się, że nie. Na przykład, przekształcenie x,y,z⟼12x,4y,2z+xy nie da się zlinearyzować przy pomocy
dyfeomorfizmu klasy C1 (patrz [13], Problem 8.1). Ten problem wiąże się z rezonansami pomiędzy wartościami własnymi (patrz
Twierdzenie Poincarégo–Dulaca w Rozdziale 3.3).
Zadanie 1.27. Uzupełnić dowód Lematu 1.7, tzn. w
przypadku nierzeczywistych wartości własnych.
Zadanie 1.28. Udowodnić wzory (1.11)–(1.15).
Zadanie 1.29. Zbadać stabilność (w sensie Lapunowa i
asymptotyczną) dla punktu osobliwego x=d/c, y=a/b, układu
Lotki–Volterry
|
x˙=xa-by, y˙=ycx-d, abcd>0, |
| (1.33) |
który opisuje dynamikę dwóch konkurujących populacji (drapieżników i ofiar).
Wskazówka: Stwierdzenie 2.11 poniżej.
Zadanie 1.30. Korzystając z Definicji 1.1 sprawdzić, czy położenie równowagi x0=0 dla równania x˙=4x-t2x jest stabilne w sensie Lapunowa, t.j. z t0=0.
Zadanie 1.31. Zbadać stabilność położenia równowagi x=y=0 dla układu x˙=ex+2y-cos3x, y˙=4+8x-2ey.
Zadanie 1.32. Zbadać stabilność zerowego rozwiązania dla układu x˙=ex-e3z, y˙=4z-3sinx+y, z˙=ln1+z-3x.
Zadanie 1.33. Dla jakich wartości parametru a rozwiązanie zerowe układu x˙=ax+y+x2, y˙=x+ay+y2 jest
asymptotycznie stabilne?
Wskazówka: gdya=-1 prosta y=x jest niezmiennicza.
Zadanie 1.34. Dla jakich wartości parametrów a i b rozwiązanie zerowe układu x˙=y+sinx, y˙=ax+by jest
asymptotycznie stabilne?
Wskazówka: dla a=b≤-1 wprowadzając z=x˙ sprowadzić
układ do postaci x˙=Hz′, z˙=-Hx′-a+cosxz, H=12z2-a12x2+1-cosx, i znaleźć funkcję Lapunowa.
Zadanie 1.35. Dla jakich wartości parametrów a i b rozwiązanie xt≡0 równania x˙˙˙+3x¨+ax˙+bx=0 jest asymptotycznie stabilne?
Zadanie 1.36. Pokazać, że dyfeomorfizm gt (lokalnego)
potoku fazowego generowanego przez pole wektorowe x˙=Ax+Ox2 ma część liniową w punkcie stałym x=0 postaci B=eAt. Wywnioskować stąd Lemat 1.21.
Zadanie 1.37. Udowodnić oszacowania (1.24) (dla odpowiedniego
układu współrzędnych i euklidesowej normy w Rn).
Zadanie 1.38. Podać jawny wzór na funkcję χ z
dowodu Twierdzenia 1.22.
Zadanie 1.39. Udowodnić nierówność dla TF1-TF2 z dowodu Twierdzenia
1.22.
Zadanie 1.40. Podać jakiś wzór na d, w zależności od a,b,c, w nierówności TF′<d.
Zadanie 1.41. Udowodnić, że hklt=ht dla k,l∈N i t≠0.
Zadanie 1.42. Udowodnić, że jeśli h spełnia własność (1.28) dla danego t>0 to też spełnia tę własność dla t<0.
Zadanie 1.43. Uzupełnić dowód Stwierdzenia 1.25.