Zagadnienia
3. Teoria bifurkacji
3.1. Wersalność
Zgodnie z Twierdzeniem 2.43 typowe pola wektorowe na zwartej
Jeśli wybierzemy przypadkowo pojedyncze pole z
Teoria bifurkacji zajmuje się badaniem zarówno geometrii zbioru
bifurkacyjnego
Należy zwrócić uwagę na jeszcze jeden aspekt tej sytuacji.
Na przestrzeni
Definicja 3.1. Dwie rodziny
Mówimy, że rodzina
Rodzina
Przykład 3.2. Rodzina
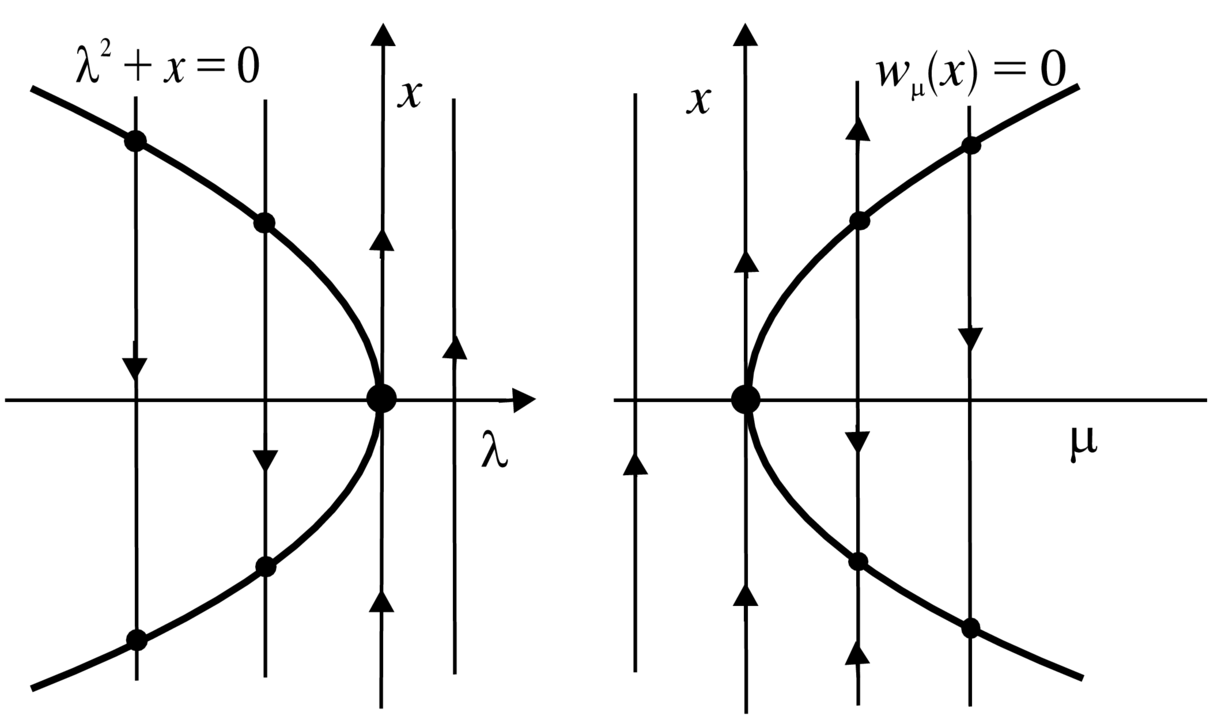
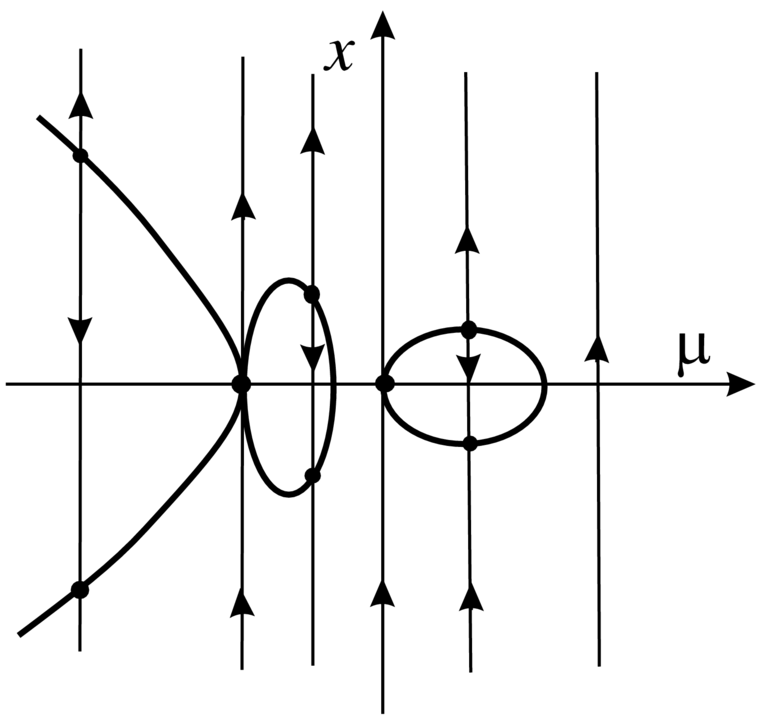
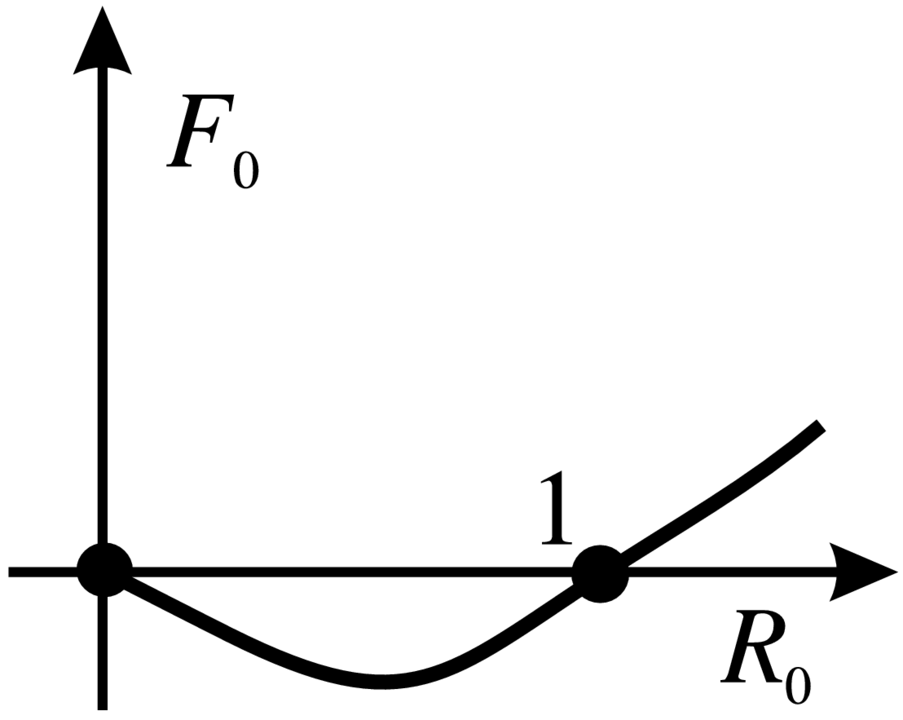
Przykład 3.3. Weźmy modelową rodzinę pól wektorowych
| (3.1) |
Odpowiednie portrety fazowe są przedstawione na Rysunku 3.2.
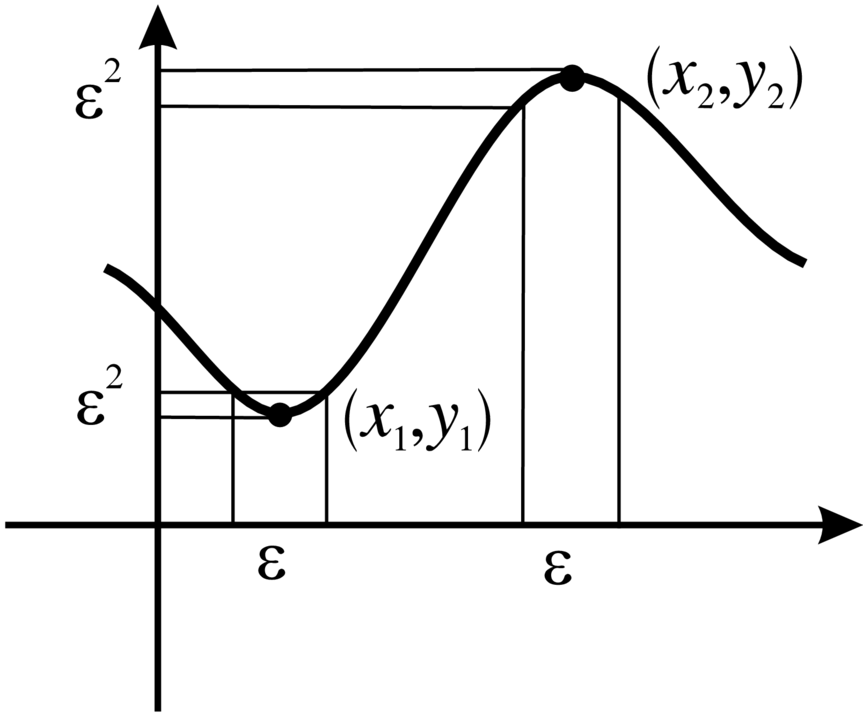
Weźmy teraz dowolną rodzinę postaci
| (3.2) |
gdzie

dla dażdego
gdzie
jest punktem lokalnego minimum funkcji
Zatem dla każdego
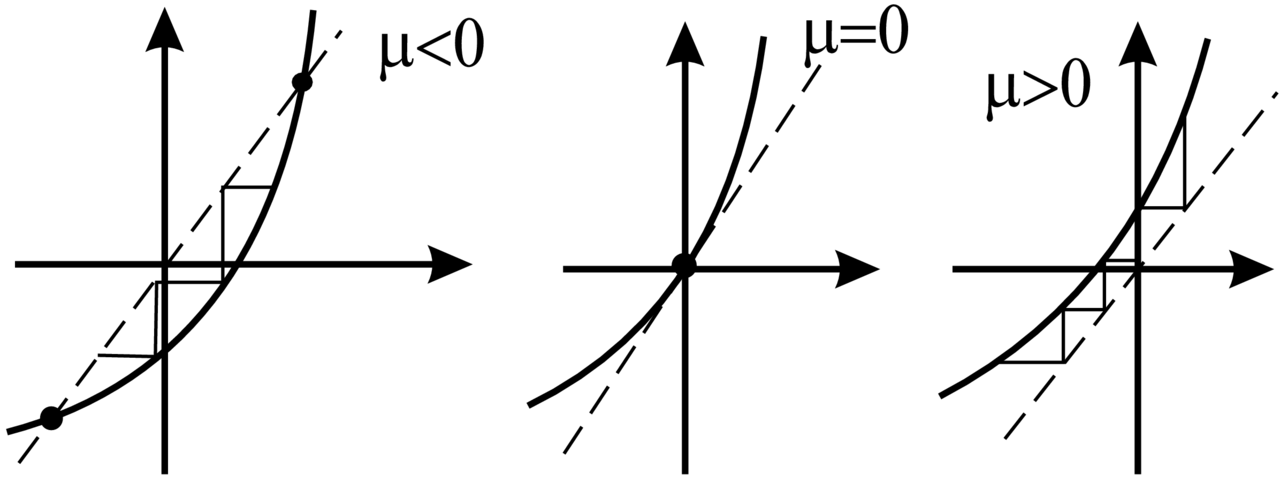
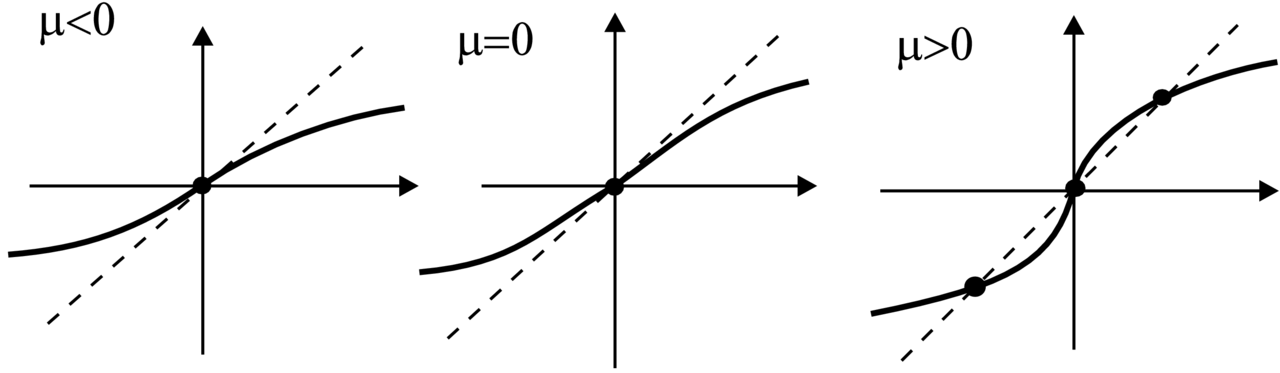
Aby się o tym przekonać, rozważmy najpierw przypadek, gdy
(a)
pola
W zależności od znaku
rozpoczynamy od konstrukcji homeomorfizmu pomiędzy krzywymi punktów równowagi:
(b) W zdegenerowanym przypadku, gdy
3.2. Transwersalność
Matematycznym aparatem do ścisłego sformułowania teorii bifurkacji i odpowiednich twierdzeń jest teoria transwersalności sformułowana przez francuskiego matematyka R. Thoma.
Niech
będzie odwzorowaniem różniczkowalnym (o wystarczającej
klasie różniczkowalności). W przypadku zwartych rozmaitości
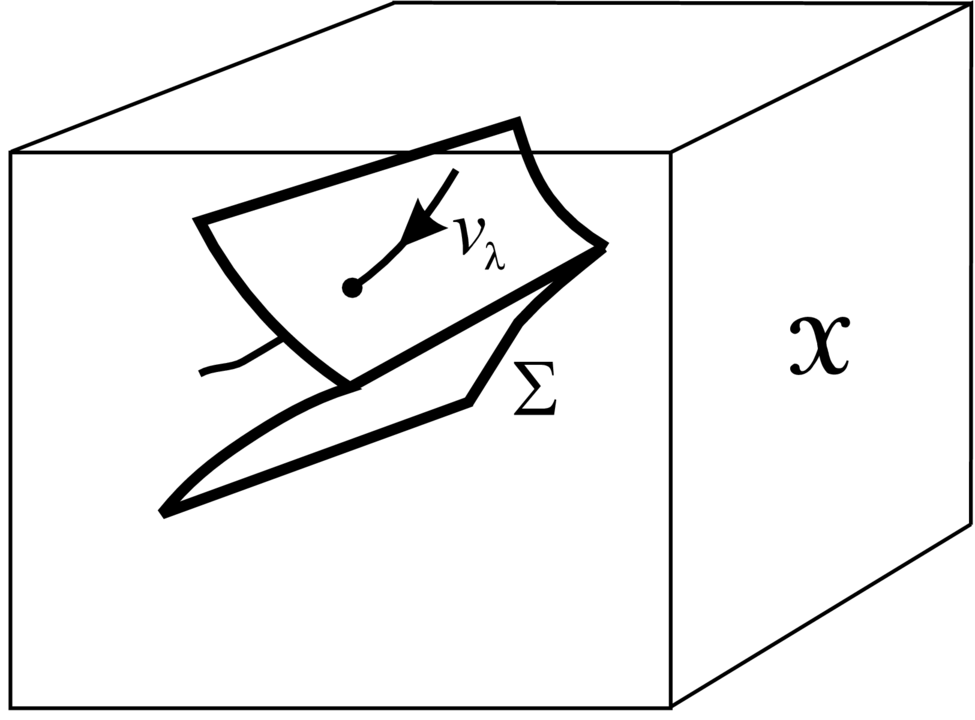
Definicja 3.4. Mówimy, że odwzorowanie
Gdy
zachodzi dla każdego punktu
dla własności transwersalności.
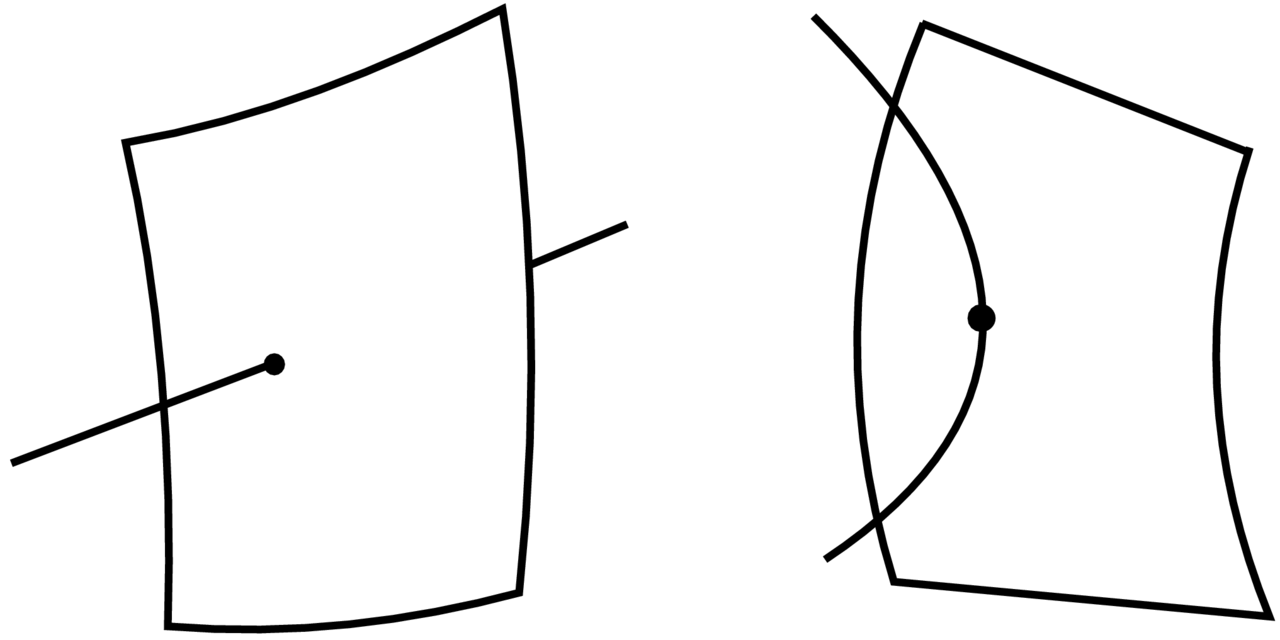
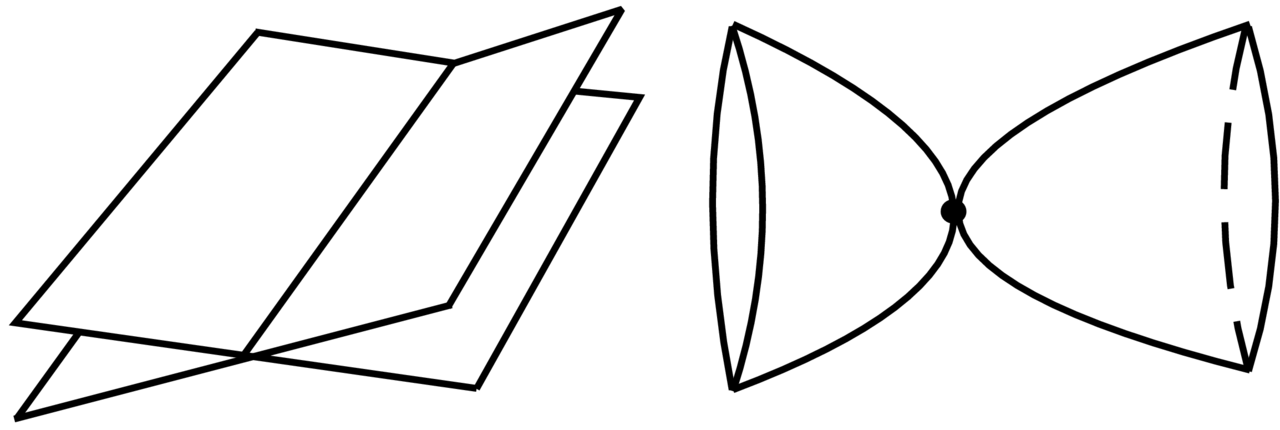
Przykład 3.5. (a) Niech
(b) Niech
(c) Przypadek
(d) Gdy
(e) Niech
Zachodzi następujące fundamentalne twierdzenie pochodzące od
Thoma12To Twierdzenie Thoma o Transwersalności, jak również jego uogólnienie podane poniżej, stanowiły istotny element stworzonej
przez niego Teorii Katastrof . Ta teoria zawiera w sobie po części
teorię osobliwości odwzorowań i funkcji jak również teorię bifurkacji układów dynamicznych.
Warto jeszcze dodać, że w przypadku uogólnienia Twierdzenia
Thoma na przypadek rozmaitości niezwartych wprowadza się specjalną topologię (tzw. topologię Whitney'a) w przestrzeni odwzorowań klasy
Twierdzenie 3.6 (Thom). Niech
To oznacza, że, z jednej strony, jeśli odwzorowanie
Dowód. Nietrudno zauważyć, że można ograniczyć się do sytuacji lokalnej, gdy
jest (lokalnie) podprzestrzenią kowymiaru
Wtedy
Jeśli
ma rząd
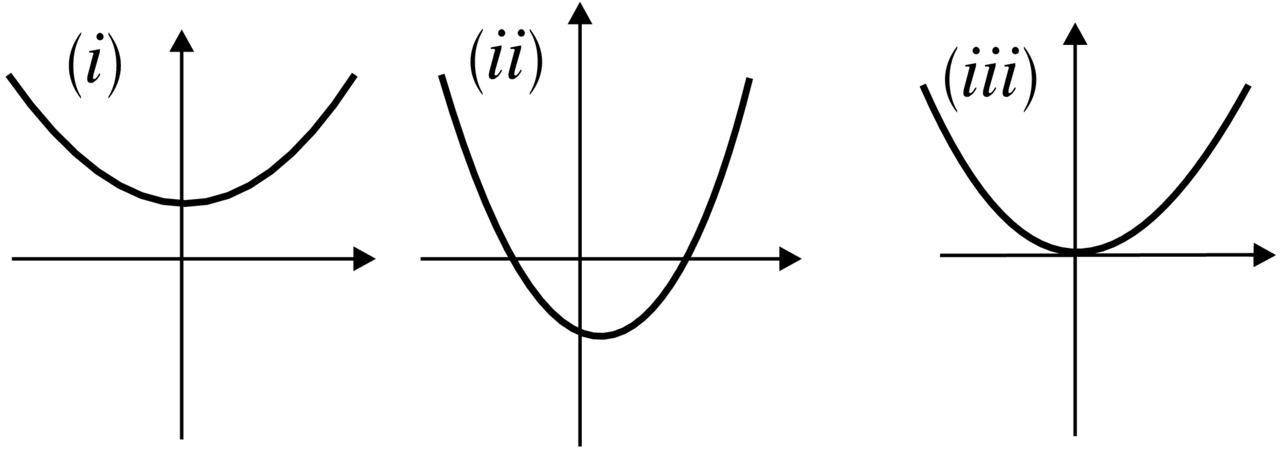
Mamy dwie możliwości:
(i)
(ii)
Aby udowodnić gęstość własności transwersalności musimy wprowadzić dodatkowe pojęcia (Zadanie 3.14).
W przypadku (ii) weźmy lokalne odwzorowanie
Przypomnijmy (patrz Definicja 3.7 poniżej), że
Latwo sprawdzić, że
Definicja 3.7. Niech
Twierdzenie 3.8 (Sard). Zbiór wartości krytycznych
dla odwzorowania różniczkowalnego
Uzasadnienie. Rozważmy przypadek
Możemy jednak pokryć każdy punkt krytyczny
co dąży do zera przy
W istocie ten sam argument pracuje przy dowolnych
Następująca definicja jest potrzebna do uogólnienia Twierdzenia Thoma. Niech
| (3.3) |
będzie odwzorowaniem dostatecznie wiele razy różniczkowalnym. Z takim odwzorowaniem można związać serię geometrycznych obiektów. Pierwszym z nich jest wykres
Innym jest wykres pochodnej, czyli wykres odwzorowania
Ogólnie, wykres odwzorowania
Definicja 3.9. Przestrzenie
Analogicznie, jeśli
Definicja 3.10. Jeśli
Twierdzenie 3.11 (Thom). Niech
Dowód. Ten dowód w znacznej części powtarza dowód Twierdzenia 3.6. Podstawowa różnica leży w dowodzie gęstości, a dokładniej, w wyborze zaburzenia. Otóż, zamiast zamiany
Przykład 3.12. Pewne naturalne warunki na odwzorowanie są interpretowane jako warunki na jego transwersalność w dżetach. Na przykład, warunek
wynika z jednoczesnej transwersalności odwzorowania
do dwóch podrozmaitości
Istotnie, transwersalność do
W zagadnieniach teorii bifurkacji zawsze, gdy pojawiają się warunki
podobnego charakteru jak w Przykładzie 3.12, możemy założyć,
że albo są spełnione z prawdopodobieństwem 1 albo z takim
samym przwdopodobieństwem nie mogą być spełnione. Ten drugi
przypadek zachodzi gdy
ZADANIA
Zadanie 3.13. W przypadku
Zadanie 3.14. Pokazać lokalną gęstość własności transwersalności w przypadku
Wskazówka: Wybrać odpowiednie zaburzenie
Zadanie 3.15. Pokazać, że
Zadanie 3.16. Uzupełnić dowód Twierdzenia 3.6.
Wskazówka: Użyć odpowiedniego rozkładu jedności
Zadanie 3.17. Udowodnić Twierdzenie Sarda w przypadkach
3.3. Bifurkacje kowymiaru 1
Bifurkacje autonomicznych pól wektorowych będziemy dzielić na lokalne i nielokalne.
Lokalne bifurkacje zachodzą w otoczeniu punktu osobliwego
taką, że
W przypadku typowych
1.
2.
Mamy trzy nielokalne bifurkacje związane z orbitą okresową
3.
4.
5.

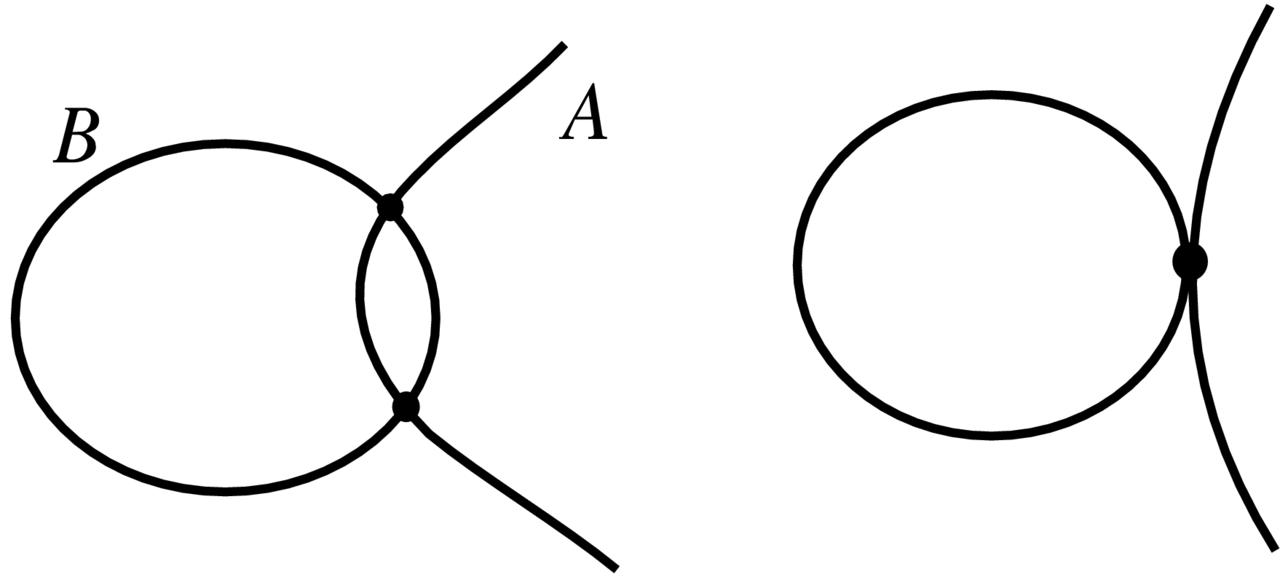
Na koniec mamy dwie nielokalne bifurkacje związane z połaczeniem separatrys (patrz Rysunek 3.10):
6. Połączenie separatrys różnych siodeł.
7. Pętla separatrys jednego siodła.
3.3.1. Redukcja do rozmaitości centralnej i forma normalna Poincarégo–Dulaca
Załóżmy, że mamy pole wektorowe
z punktem osobliwym
| (3.4) |
gdzie
Twierdzenie 3.18 (Szoszitaiszwili). W sytuacji jak powyżej istnieje lokalny homeomorfizm
| (3.5) |
gdzie
Dowód tego twierdzenia jest techniczny i skomplikowany (patrz [5]). Dlatego nie będziemy go tutaj przytaczać. Za to wyciągniemy z niego bardzo praktyczne zastosowania. Zauważmy też, że to twierdzenie jest uogólnieniem Twierdzenia Grobmana–Hartmana.
Definicja 3.19. Podrozmaitość zadaną równaniem
(w terminach (3.5)) nazywamy rozmaitością centralną.
Twierszenie Szoszitaiszwiliego mówi, że w przypadku niehiperbolicznego puktu osobliwego `ciekawa część' dynamiki odbywa się na rozmaitości centralnej.
Dla rodziny pól wektorowych
do którego stosujemy Twierdzenie 3.18 (z
Stwierdzenie 3.20. Dla rodziny
Samo istnienie rozmaitości centralnej
Ale istnieje sposób wyznaczenia
(gdzie współrzędne
Ta redukcja do
Niestety, na ogół okazuje się, że szeregi zadające
Przykład 3.21. Rozważmy układ
Tutaj
To prowadzi do następującej rekurencji:
(Zadania 3.27 i 3.28).
Innym narzędziem użytecznym w teorii bifurkacji, które również opiera się na (często rozbieżnych) szeregach formalnych, jest następne twierdzenie. Rozważamy kiełki analitycznych pól wektorowych
| (3.6) |
takich, że macierz
Definicja 3.22. Mówimy, że wartości własne spełniają relację rezonansową typu
Twierdzenie 3.23 (Poincaré–Dulac). Załóżmy że mamy kiełek zespolonego analitycznego pola wektorowego (3.6). Wtedy istnieje zamiana
taka, że każda składowa po prawej stronie jest formalnym
szeregiem potęgowym od
| (3.7) |
przy czym sumy po prawych stronach równań (3.7) biegną
po takich wielowskaźnikach
Dowód. Sprowadzanie do postaci normalnej Poincarégo–Dulaca (3.7) odbywa się przy pomocy serii zamian postaci
| (3.8) |
czyli dodajemy wyrazy jednorodne stopnia
Załóżmy, że w polu (3.6) do stopnia
| (3.9) |
gdzie
i
Z lewej strony wzoru (3.9), po podstawieniu (3.8), mamy
Teraz, porównując wyrazy jednorodne stopnia
Z nich jasno wynika, że jeśli
Przykład 3.24. Rozważmy przypadek rezonansowego węzła
czyli dla
(Zadanie 3.30). Okazuje się, że w tym przypadku zamiana prowadząca do postaci normalnej jest analityczna (o ile wyjściowy kiełek był analityczny). 13Do tego przypadku można też zaliczyć sytuację, gdy
Przykład 3.25. Dla siodło–węzła
czyli z
Okazuje się, że na ogół ta forma normalna nie jest analityczna.
Przykład 3.26.Dla
czyli z
Również i ta forma nie jest na ogól analityczna (Zadanie 3.31).
ZADANIA
Zadanie 3.27. Znaleźć rozmaitość centralną
punktu
Zadanie 3.28. Znaleźć przybliżenie rozmaitości
centralnej z dokładnością do wyrazów sześciennych dla
punktu
Zadanie 3.29. Pokazać, że przekształcenie odwrotne do przekształcenia (3.8) ma postać jak w dowodzie Twierdzenia 3.23.
Zadanie 3.30. Pokazać, że w każdym innym przypadku węzła, tzn. gdy
Zadanie 3.31. Uogólnić Przykład 3.26 na przypadek
3.3.2. Bifurkacja siodło–węzeł
Mamy
Na nią nakładamy następujące warunki:
1.
2. Macierz
3. Niech
gdzie
4. Ostatnie założenie mówi, że
(Zadanie 3.34).
Uwaga 3.32. Powyższe warunki są warunkami w przestrzeni

Twierdzenie 3.33.Jeśli są spełnione powyższe
warunki, to rodzina
Dowód. Z twierdzenia o redukcji do rozmaitości centralnej możemy założyć, że mamy układ postaci
Mamy następujące własności wynikające bezpośrednio z Warunków 1, 2, 3 i 4:
(i)
(ii)
(iii)
(iv)
Dalszy dowód przebiega dokładnie jak w Przykładzie 3.3.
Na Rysunku 3.11 jest przedstawiona bifurkacja siodło–węzeł dla rodziny dwuwymiarowych pól wektorowych. ∎
ZADANIA
Zadanie 3.34. Pokazać, że Warunek 4 posiada następującą interpretację. Z Warunku 3 wynika, że równanie
Zadanie 3.35. Dla
3.3.3. Bifurkacja Andronowa–Hopfa
Mamy
Na nią nakładamy następujące warunki:
1.
2.
3. Następne założenie mówi, że
4. Ostatnie założenie wykorzystuje formę normalną
Poincarégo–Dulaca dla
gdzie
gdzie
Ostatni warunek niezdegenerowania mówi, że
Następujące twierdzenie nosi też nazwę Twierdzenia o narodzinach cyklu granicznego i jest najbardziej chyba znanym twierdzeniem z teorii bifurkacji.
Twierdzenie 3.36 (Andronov–Hopf). Jeśli są spełnione powyższe warunki, to rodzina
(
| (3.10) |
Uwaga 3.37. Z dokładnością do zmiany orientacji płaszczyzny (np.
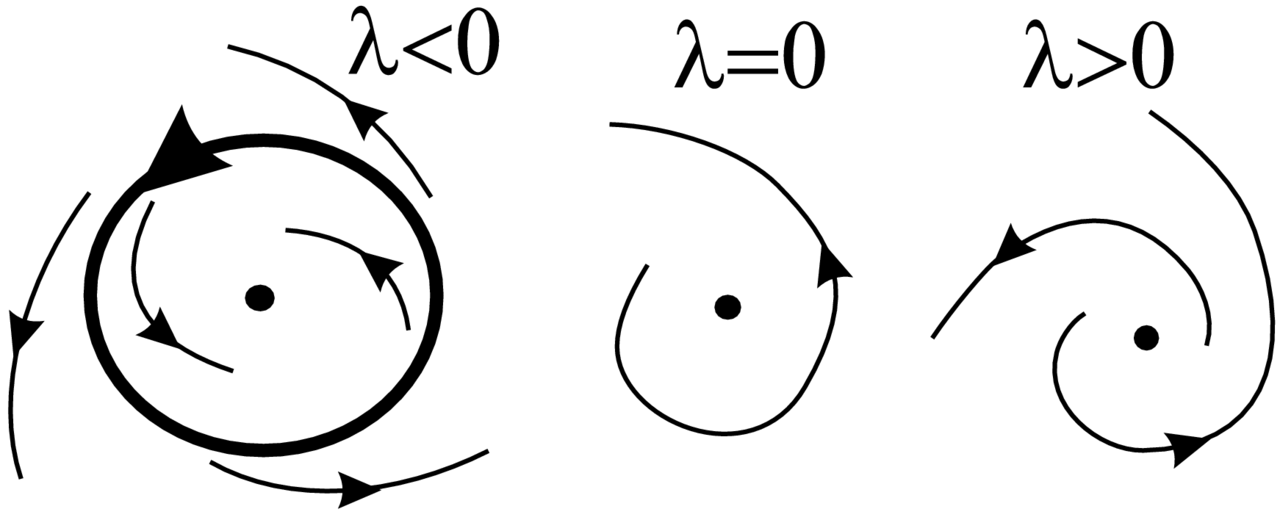
Na Rysunku 3.12 obserwujemy tzw. ostrą utratę stabilności. Istotnie, dla
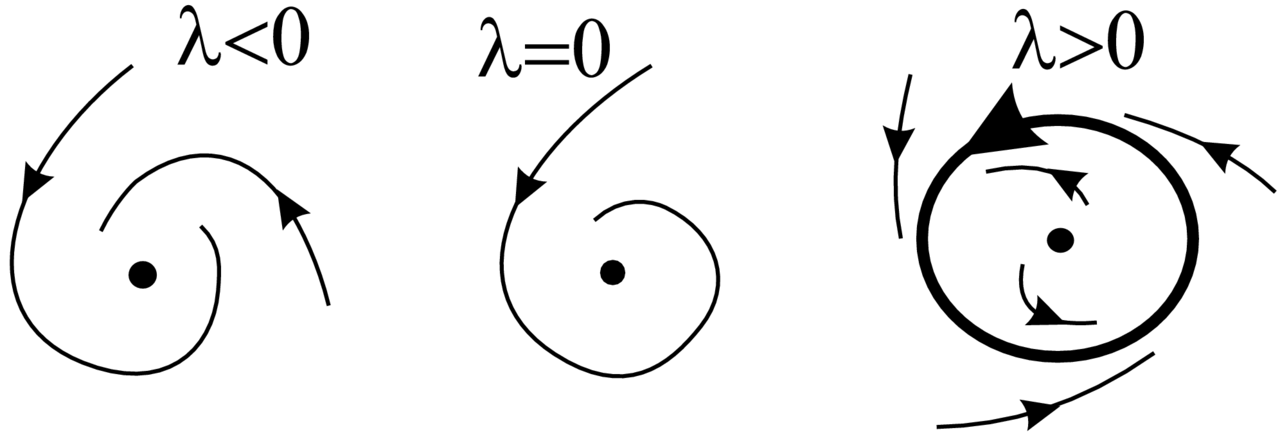
Na Rysunku 3.13 mamy do czynienia z tzw. łagodną utratą
stabilności. Dla
Dowód Twierdzenia 3.36. Podobnie jak w przypadku Twierdzenia o Bifurkacji Siodło–Węzeł sprowadzamy najpierw zagadnienie do sytuacji dwuwymiarowej (na rozmaitości centralnej).
Lekko uzupełniając dowód Twierdzenia Poincarégo–Dulaca
sprowadzamy całą rodzinę do następującej postaci
normalnej, modulo wyrazy rzędu
| (3.11) |
| (3.12) |
(Zadanie 3.42).
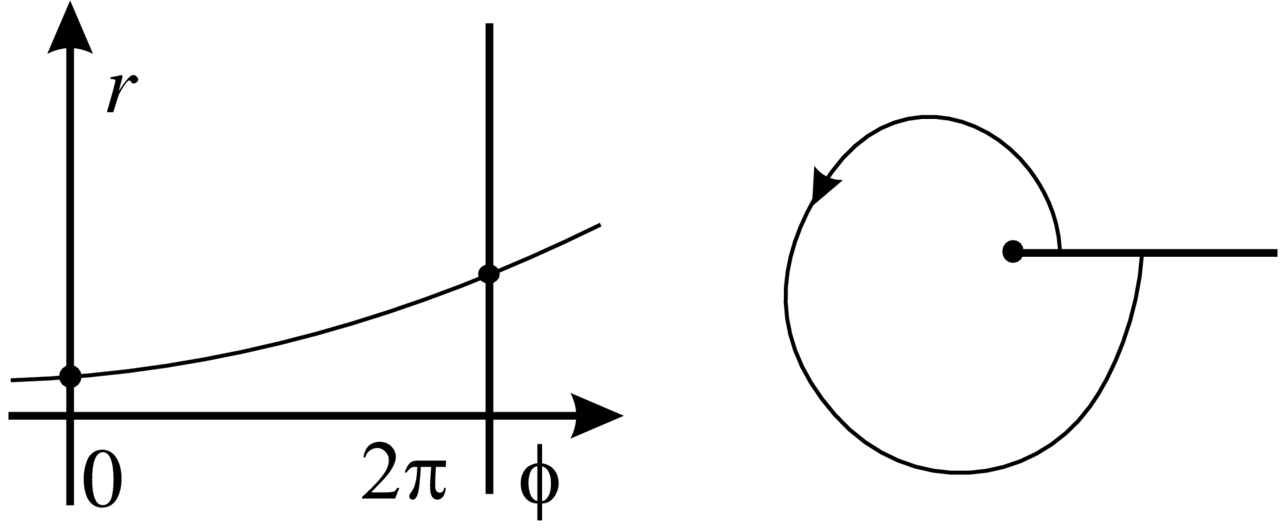
Dla układu (3.12) definiujemy przekształcenie powrotu Poincarégo
(a) Dla
(b) Niech
Wtedy w obszarze
| (3.13) |
dla małego parametru
Oznaczmy
(c) Dla
Widać zatem, że w każdej z trzech powyższych sytuacji
portrety fazowe są `jakościowo' takie same jak dla modelowej rodziny
(3.10). Wypadałoby jeszcze skonstruować rodzinę
Uwaga 3.38. E. Hopf w swojej oryginalnej pracy udowodnił ogólniejsze wynik niż Twierdzenie 3.36. Mianowicie opuścił on założenie, że
mamy rodzinę rozwiązań okresowych
Arnold [5] często podkreślał, że w przypadku

Przykład 3.39 (Model Żukowskiego szybowca). Niech samolot
leci z prędkością
| (3.14) |
Rozważmy najpierw przypadek
| (3.15) |
Przy
i punktami równowagi
Dla ogólnej rodziny (3.14) z małymi
gdzie
Tutaj w momencie, gdy dywergencja pola (3.14) w ognisku
ZADANIA
Zadanie 3.40. Pokazać, że współczynniki
Zadanie 3.41. Udowodnić wzór (3.11).
Wskazówka: Redukcję skończonej liczby wyrazów rezonansowych
można przeprowadzać jednocześnie dla
Zadanie 3.42. Udowodnić wzór (3.12).
Zadanie 3.43. Pokazać ściśle, że równanie
Zadanie 3.44. Zbadać punkty osobliwe pola (3.15). Naszkicować portrety fazowe dla
3.3.4. Bifurkacje dla cykli granicznych
Niech
takich, że
Zakładamy też, że dla
A. Bifurkacja siodło–węzeł dla cyklu granicznego. Tutaj
mamy
Odpowiednie bifurkacje są przedstawione na Rysunku 3.17. Widzimy, że dla
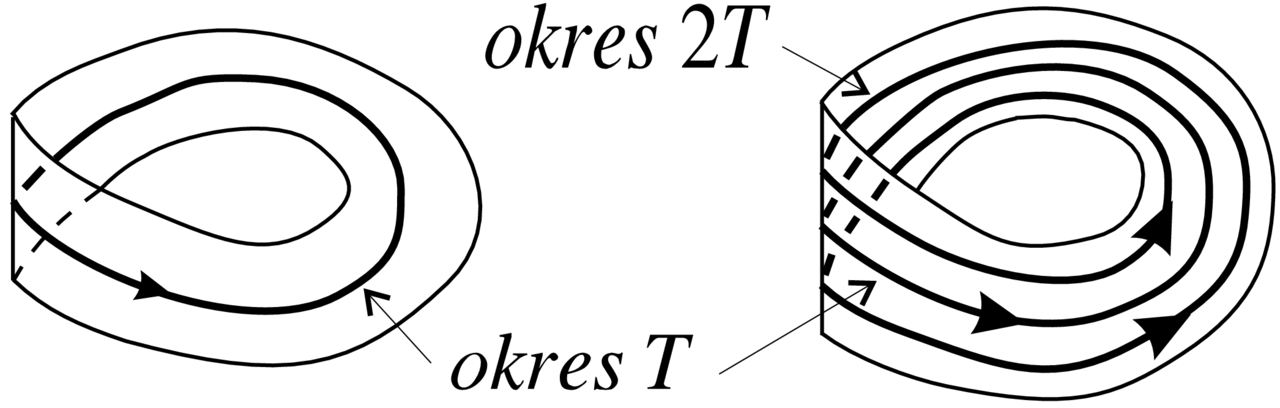
B. Bifurkacja podwojenia okresu. Tutaj mamy
Modelową rodziną przekształceń w tym przypadku jest
Oczywiście to przekształcenie ma tylko jeden punkt stały, tj.
i posiada dwa dodatkowe punkty stałe
Odpowiednie bifurkacje dla