Zagadnienia
8. Równania Eulera - Lagrange'a
8.1. Całka pierwsza energii
Jak widzieliśmy w punkcie 7.4 poprzedniego wykładu, układy równań Eulera są na ogół zbyt skomplikowane, aby umożliwić dokładny opis poszukiwanych krzywych. Z pomocą przychodzi następujące twierdzenie:
Twierdzenie 8.1
W przypadku, kiedy funkcja Lagrange'a ![]() nie zależy explicite od czasu, funkcja o postaci
nie zależy explicite od czasu, funkcja o postaci
 |
(8.1) |
jest stała na krzywych będących rozwiązaniami układu równań Eulera (7.17). Funkcję (8.1) będziemy nazywać całką energii.
W każdym z równań (7.17) wykonajmy różniczkowanie ![]() Ponieważ
Ponieważ ![]() zależy od
zależy od ![]() za pośrednictwem
za pośrednictwem ![]() oraz
oraz ![]()
![]() otrzymamy
otrzymamy
![\frac{\partial L}{\partial{\gamma}_{j}}(\gamma,\dot{\gamma})-\sum _{{k=1}}^{n}\Bigg[\frac{\partial}{\partial{\gamma}_{k}}\Big(\frac{\partial L}{\partial\dot{\gamma}_{j}}\Big)(\gamma,\dot{\gamma})\cdot\dot{\gamma}_{k}+\frac{\partial}{\partial{\dot{\gamma}}_{k}}\Big(\frac{\partial L}{\partial\dot{\gamma}_{j}}\Big)((\gamma,\dot{\gamma})\cdot\ddot{\gamma}_{k}\Bigg]=0](wyklady/mmk/mi/mi808.png) |
(8.2) |
![]() Pomnóżmy
Pomnóżmy ![]() te równanie 8.2 przez
te równanie 8.2 przez ![]() i dodajmy wszystkie równania stronami. Otrzymamy
i dodajmy wszystkie równania stronami. Otrzymamy
![\sum _{{j=1}}^{n}\frac{\partial L}{\partial{\gamma}_{j}}(\gamma,\dot{\gamma})\cdot\dot{\gamma}_{j}-\sum _{{j,k=1}}^{n}\Bigg[\frac{\partial}{\partial{\gamma}_{k}}\Big(\frac{\partial L}{\partial{\dot{\gamma}_{j}}}\Big)(\gamma,\dot{\gamma})\cdot\dot{\gamma}_{j}\dot{\gamma}_{k}+\frac{\partial}{\partial{\gamma\dot{\gamma}_{k}}}\Big(\frac{\partial L}{\partial\dot{\gamma}_{j}}\Big)(\gamma,\dot{\gamma})\cdot\dot{\gamma}_{j}\ddot{\gamma}_{k}\Bigg]=0](wyklady/mmk/mi/mi851.png) |
(8.3) |
Oznaczmy
 |
Wtedy, uzupełniając każdy ze składników pierwszej sumy w (8.3) o ![]() i odejmując to samo wyrażenie w drugiej części, możemy (8.3) zapisać w postaci
i odejmując to samo wyrażenie w drugiej części, możemy (8.3) zapisać w postaci
![\displaystyle{\sum _{{j=1}}^{n}}\big(\frac{\partial L}{\partial{\gamma}_{j}}(\gamma,\dot{\gamma})\dot{\gamma}_{j}+\frac{\partial L}{\partial\dot{\gamma}_{j}}(\gamma,\dot{\gamma})\ddot{\gamma}_{j}-\sum _{{k=1}}^{n}\Bigg[\frac{\partial}{\partial{\gamma}_{k}}M(\gamma,\dot{\gamma})\dot{\gamma}_{k}+\frac{\partial}{\partial{\dot{\gamma}_{k}}}M(\gamma,\dot{\gamma})\ddot{\gamma}_{k}+\frac{\partial L}{\partial\dot{\gamma}_{k}}(\gamma,\dot{\gamma})\cdot\ddot{\gamma}_{k}\Bigg]=0](wyklady/mmk/mi/mi820.png) |
czyli
co należało wykazać.
∎8.2. Zastosowanie całki energii
Zastosujemy Twierdzenie (8.1) do wyznaczania postaci krzywej najszybszego spadku oraz krzywej łańcuchowej.
8.2.1. Krzywa najszybszego spadku
W poprzednim wykładzie, dla uproszczenia zapisu przyjęliśmy, że początek krzywej najszybszego spadku znajduje się w (0,1) a koniec w (1,0). czytelnik bez trudu zmodyfikuje otrzymane rozumowanie na przypadek nieco ogólniejszy - początek w (0,a) a koniec w (b,0).W następującym dalej wywodzie traktujmy ten ogólniejszy przypadek. Zgodnie z (7.6) funkcja Lagrange'a w zagadnieniu brachistochrony ma postać:
zatem całka pierwsza 8.1 wynosi:
| (8.4) |
Gdzie ![]() jest szukaną funkcją a
jest szukaną funkcją a ![]() oznacza
oznacza ![]() Przyjmując, że
Przyjmując, że ![]() i mnożąc obie strony otrzymanego w ten sposób równania przez
i mnożąc obie strony otrzymanego w ten sposób równania przez ![]() otrzymamy:
otrzymamy:
| (8.5) |
Wskażemy rozwiązania tego równania. Są one związane ze znanymi z geometrii cykloidami.
Definicja 8.1
Cykloida to krzywa, jaką zakreśla punkt okręgu, toczącego się po prostej.
Przyjmiemy, że promień okręgu wynosi ![]() a prędkość kątowa
a prędkość kątowa ![]() Jeżeli założymy, że nasz punkt w chwili zero znajduje się w początku układu współrzędnych oraz, że okrąg toczy się w kierunku dodatnim po
Jeżeli założymy, że nasz punkt w chwili zero znajduje się w początku układu współrzędnych oraz, że okrąg toczy się w kierunku dodatnim po ![]() to przyjmując czas jako parametr, otrzymamy opis parametryczny naszej cykloidy w postaci:
to przyjmując czas jako parametr, otrzymamy opis parametryczny naszej cykloidy w postaci:
| (8.6) |
Jej wykres wygląda następująco.
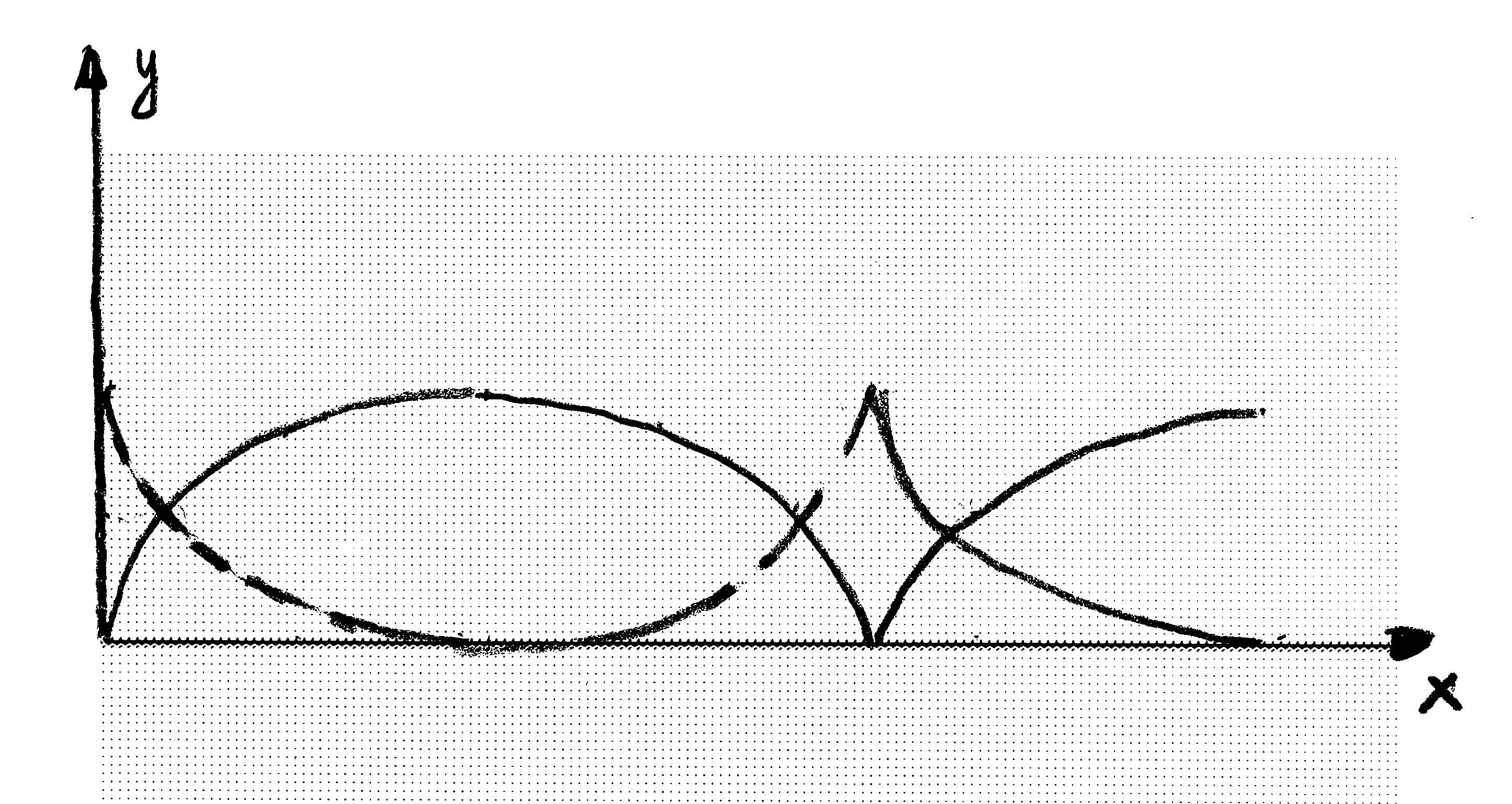
Rys. 8.2.1.
Rozważmy krzywą powstającą z cykloidy (8.6) przez odbicie jej wykresu w osi poziomej i przesunięcie go o ![]() w górę. Powstaje krzywa, której wykres narysowany jest linią przerywaną na rys 8.2.1 i której opis parametryczny ma postać:
w górę. Powstaje krzywa, której wykres narysowany jest linią przerywaną na rys 8.2.1 i której opis parametryczny ma postać:
| (8.7) |
Chcąc obliczyć  dla krzywej (8.7) zauważmy, że
dla krzywej (8.7) zauważmy, że ![]()
i wobec tego ![]()
zatem
Wobec tego
| (8.8) |
Widzimy więc, że stałą wartość ![]() tego wyrażenia uzyskamy jedynie wtedy, kiedy
tego wyrażenia uzyskamy jedynie wtedy, kiedy ![]() Przy tym, chcąc uzyskać
Przy tym, chcąc uzyskać ![]() możemy przyjąć
możemy przyjąć
![]() tj
tj ![]()

8.2.2. Krzywa łańcuchowa
Zgodnie z rozważaniami z Wykładu 7 dla ![]() szukamy punktów krytycznych funkcjonału
szukamy punktów krytycznych funkcjonału
 |
przy warunku
 |
(8.9) |
Mamy więc funkcję Lagrange'a
i zgodnie z Twierdzeniem 8.1 otrzymujemy warunek
skąd
 |
(8.10) |
Okazuje się, że rozwiązań tego równania można poszukiwać wśród funkcji o postaci ![]() Istotnie, wtedy
Istotnie, wtedy ![]() natomiast
natomiast
Dobierając ![]() oraz
oraz ![]() tak, aby
tak, aby ![]() otrzymamy (8.10) dla
otrzymamy (8.10) dla ![]() Istotnie:
Istotnie:
 |
Musimy jeszcze zapewnić sobie spełnienie warunku (8.9 ), który przyjmuje postać
 |
czyli
Podsumowując.
Krzywa zwisu łańcucha o długości l zawieszonego w punktach (-1, 0) oraz (1, 0) ma postać:
gdzie ![]() jest rozwiązaniem równania
jest rozwiązaniem równania ![]()
8.3. Równania Eulera - Lagrange'a
Niech ![]() będzie układem n- punktów materialnych o przestrzeni konfiguracyjnej
będzie układem n- punktów materialnych o przestrzeni konfiguracyjnej ![]() , potencjale
, potencjale ![]() i przestrzeni fazowej
i przestrzeni fazowej ![]() Niech
Niech ![]() będzie krzywą ruchu
będzie krzywą ruchu ![]() taką, że
taką, że ![]() i
i ![]() Rozważmy rodzinę krzywych
Rozważmy rodzinę krzywych
oraz funkcjonał ![]() na
na ![]() o postaci
o postaci
 |
(8.11) |
gdzie ![]() jest funkcją gładką na przestrzeni
jest funkcją gładką na przestrzeni ![]() Lagrange zauważył, że jeżeli funkcja
Lagrange zauważył, że jeżeli funkcja ![]() ma postać
ma postać
 |
(8.12) |
to zagadnienie wariacyjne (8.11) ma dokładnie jedną ekstremalę, będącą krzywą ruchu ![]()
Funkcję (8.12) nazywa się ”funkcją Lagrange'a” układu ![]() funkcjonał (8.11) z funkcją Lagrange`a (8.12) - działaniem. Spostrzeżenie, że przyroda wybiera ekstremalę
funkcjonał (8.11) z funkcją Lagrange`a (8.12) - działaniem. Spostrzeżenie, że przyroda wybiera ekstremalę ![]() jako krzywą realizującą ruch - nazywa się zasadą najmniejszego działania.
jako krzywą realizującą ruch - nazywa się zasadą najmniejszego działania.
Zweryfikujmy rachunkiem spostrzeżenie Lagrange'a. Niech ![]() ma postać 8.12. Wtedy lewe strony równań Eulera
ma postać 8.12. Wtedy lewe strony równań Eulera
| (8.13) |
mają formę:
![\displaystyle{-\frac{\partial U}{\partial q_{i}}-\frac{d}{dt}\Bigg[\frac{\partial}{\partial v_{i}}\sum _{{i=1}}^{{n}}m_{i}\frac{v_{i}^{2}}{2}\Bigg]}=-\frac{\partial U}{\partial q_{i}}-\frac{d}{dt}m_{i}v_{i}](wyklady/mmk/mi/mi812.png) |
a zatem równania Eulera przyjmą postać równań Newtona
| (8.14) |
Uwaga 8.1
W sformułowaniu zagadnienia wariacyjnego (8.11) jako jego istotna część występuje wybór punktów ![]() i
i ![]() Na ogół jednak nie mamy pewności, że przez z góry wybrane punkty przejdzie choćby jedna krzywa ruchu naszego układu. Dlatego zagadnienie wariacyjne jest przez nas używane jedynie do wygenerowania innego opisu ekstremali za pomocą równań Eulera-Lagrange'a, który to opis nie zależy od wyboru
Na ogół jednak nie mamy pewności, że przez z góry wybrane punkty przejdzie choćby jedna krzywa ruchu naszego układu. Dlatego zagadnienie wariacyjne jest przez nas używane jedynie do wygenerowania innego opisu ekstremali za pomocą równań Eulera-Lagrange'a, który to opis nie zależy od wyboru ![]()
Uwaga 8.2
Pozornie błahe spostrzeżenie, że równanie Newtona można otrzymać jako równanie związane z zasadą wariacyjną 8.11 przy odpowiednio dobranej funkcji ![]() ma liczne i ważne konsekwencje. Oto kilka z nich.
ma liczne i ważne konsekwencje. Oto kilka z nich.
-
Równania Newtona opierają się na oczywistej i dlatego niezauważalnej zasadzie, że iloraz różnicowy funkcji wektorowej jest wektorem, którego współrzędne są ilorazami różnicowymi odpowiednich współrzędnych rozważanych funkcji. Zasada ta załamuje się przy przejściu do współrzędnych krzywoliniowych. Przyjęcie jako punktu odniesienia zasady wariacyjnej pozwala otrzymać szukany ruch - ekstremalę tej zasady - posługując się dowolnymi współrzędnymi.
-
Idąc dalej tym tropem możemy zdefiniować krzywe ruchu jako rozwiązania układu (8.13) z odpowiednio dobraną funkcją Lagrange`a w sytuacji, kiedy bezpośrednie zastosowanie drugiej zasady mechaniki Newtona jest trudne lub niemożliwe.
-
Przykładem sytuacji z (2) są układy z więzami, których omówienie przeniesiemy do następnego punktu (8.4) tego wykładu.
-
Równania Eulera - Lagrange'a, dzięki swej formie, wnoszą do dyskusji o opisywanym przez nas ruchu nową informację. Jeżeli rozważamy układ
 cząstek, gdzie położenie
cząstek, gdzie położenie  tej cząstki opisuje wektor
tej cząstki opisuje wektor  oraz
oraz  ta współrzędna
ta współrzędna  wektora
wektora  nie występuje explicite w funkcji Lagrange'a (czyli potencjał U od niej nie zależy), to odpowiednie równanie 8.13 przyjmuje postać:
nie występuje explicite w funkcji Lagrange'a (czyli potencjał U od niej nie zależy), to odpowiednie równanie 8.13 przyjmuje postać:
(8.15) Oznacza to, że wielkość
 zwana
zwana  tym pędem uogólnionym i oznaczana
tym pędem uogólnionym i oznaczana  jest całką pierwszą ruchu.
jest całką pierwszą ruchu.


8.4. Układy z więzami.
Rozważmy podrozmaitośc ![]() zanurzoną w
zanurzoną w ![]() Wyobraźmy sobie, że traktowany przez nas układ mechaniczny jest realizowany przez punkt
Wyobraźmy sobie, że traktowany przez nas układ mechaniczny jest realizowany przez punkt ![]() a okoliczności zewnętrzne wymagają, aby w czasie ruchu pozostawał on na rozmaitości
a okoliczności zewnętrzne wymagają, aby w czasie ruchu pozostawał on na rozmaitości ![]() Te okoliczności zewnętrzne nazywają sie więzami holonomicznymi.
Te okoliczności zewnętrzne nazywają sie więzami holonomicznymi.
Przykład 8.1
-
Kulka pozostająca wewnątrz pucharu o danym opisie analitycznym w polu ziemskiej grawitacji.
-
Para punktów o danych masach związana sztywno nieważkim prętem.
-
Ciało sztywne, czyli układ skończonej liczby punktów, których wzajemne odległości pozostają stałe.
Definicja 8.2
Niech ![]() będzie
będzie ![]() wymiarową podrozmaitością w
wymiarową podrozmaitością w ![]() przestrzeni konfiguracyjnej punktów
przestrzeni konfiguracyjnej punktów ![]() o masach
o masach ![]() Oznaczmy przez
Oznaczmy przez ![]() dowolne lokalne współrzędne na rozmaitości
dowolne lokalne współrzędne na rozmaitości ![]() i niech
i niech ![]() będzie potencjałem określonym na
będzie potencjałem określonym na ![]() Ponieważ każdy punkt na rozmaitości
Ponieważ każdy punkt na rozmaitości ![]() wyznacza swoje trójki współrzędnych
wyznacza swoje trójki współrzędnych ![]() w
w ![]() to ewolucję układu z więzami można opisać za pomocą ewolucji współrzędnych
to ewolucję układu z więzami można opisać za pomocą ewolucji współrzędnych ![]() Ewolucja tych współrzędnych opisana jest układem Eulera -Lagrange'a.
Ewolucja tych współrzędnych opisana jest układem Eulera -Lagrange'a.
| (8.17) |
 |
(8.18) |
a ![]() jest opisem parametrycznym, wyznaczonym przez współrzędne
jest opisem parametrycznym, wyznaczonym przez współrzędne ![]()
Uwaga 8.3
Definicja 8.2 zawiera implicite fakt, że otrzymane rozwiązanie nie zależy od od wyboru lokalnej parametryzacji (lokalnych współrzędnych) na ![]() Istotnie, funkcję (8.18) w obszarze parametrów dla ustalonej parametryzacji otrzymamy, podstawiając
Istotnie, funkcję (8.18) w obszarze parametrów dla ustalonej parametryzacji otrzymamy, podstawiając
![]() oraz
oraz
 |
w funkcji Lagrange'a
 |
dla ruchu pod wpływem potencjału ![]() w
w ![]() Mając
Mając ![]() jak w (8.18) i wprowadzając inne współrzędne
jak w (8.18) i wprowadzając inne współrzędne ![]() i wyliczając podobne
i wyliczając podobne ![]() uzyskujemy różne przestawienia, zależne od wyboru współrzędnych dla tej samej funkcji Lagrange'a. Niezależność rozwiązań układu Eulera - Lagrange'a od wybranej parametryzacji jest konsekwencją Uwagi 8.2 (a).
uzyskujemy różne przestawienia, zależne od wyboru współrzędnych dla tej samej funkcji Lagrange'a. Niezależność rozwiązań układu Eulera - Lagrange'a od wybranej parametryzacji jest konsekwencją Uwagi 8.2 (a).


