Zagadnienia
3. Funkcja odwrotna
W analizie pewnego modelu dotyczącego transportu morfogenów w tkankach [16] istotną rolę odgrywa funkcja
a ściślej: funkcja odwrotna do niej, ![]() . Naszym zadaniem jest naszkicowanie wykresu
. Naszym zadaniem jest naszkicowanie wykresu ![]() dla różnych wartości
dla różnych wartości ![]() i zbadanie, jak bardzo
i zbadanie, jak bardzo ![]() jest bliskie 1, gdy
jest bliskie 1, gdy ![]() jest rzędu kilkudziesięciu.
jest rzędu kilkudziesięciu.
Jasne jest, że wszelkie nasze komputerowe działania musimy zacząć od zdefiniowania funkcji ![]() . Zrobimy to w Octave:
. Zrobimy to w Octave:
function v = sigmafun(s,M) v = (2/(M-1))*(1-(1-s).^(M-1)) - s.*(1-s).^(M-1); end
(Dalsze rozważania będziemy prowadzić dla ![]() ). Jeśli chcieć tylko z grubsza naszkicować wykres odwrotnej, to zadanie robi się banalne: wykres
). Jeśli chcieć tylko z grubsza naszkicować wykres odwrotnej, to zadanie robi się banalne: wykres ![]() to zbiór punktów postaci
to zbiór punktów postaci
a to jest przecież ,,to samo”, co zbiór
Wobec tego wystarczy skorzystać z funkcji plot, ale ,,na opak”:
M = 0.5; s = linspace(0,1); plot(sigmafun(s,M), s, 'r-', 'linewidth', 2);
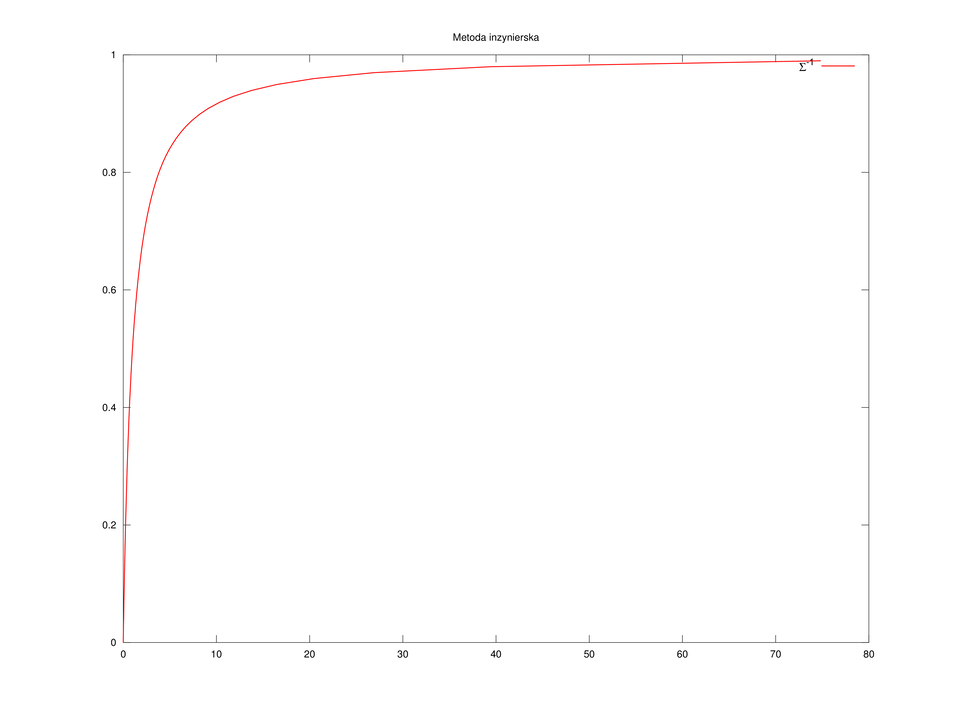
Z wykresu na rysunku 3.1 widzimy, że ![]() bardzo szybko przybliża się do wartości granicznej równej 1, co sugerowałoby wybór innej skali dla wizualizacji: tym, co mogłoby nas naprawdę zainteresować, mogłaby być szybkość przybliżania się
bardzo szybko przybliża się do wartości granicznej równej 1, co sugerowałoby wybór innej skali dla wizualizacji: tym, co mogłoby nas naprawdę zainteresować, mogłaby być szybkość przybliżania się ![]() do 1: wybralibyśmy więc wówczas, zamiast zwykłego
do 1: wybralibyśmy więc wówczas, zamiast zwykłego plot, znacznie bardziej wyraziste semilogy(sigmafun(s,M), 1-s). Jednak dla ustalenia uwagi, w dalszym ciągu pozostaniemy przy wykresie w skali liniowej.
3.1. Doprecyzowanie zadania
Niepokojący jest prawy koniec wykresu: wszak ![]() jest nieokreślone! Zatem doprecyzujmy nasze zadanie: w naszym konkretnym zastosowaniu, chcielibyśmy wiedzieć, ze względu na naturę badanego zjawiska, jak blisko 1 jest
jest nieokreślone! Zatem doprecyzujmy nasze zadanie: w naszym konkretnym zastosowaniu, chcielibyśmy wiedzieć, ze względu na naturę badanego zjawiska, jak blisko 1 jest ![]() i narysować wykres
i narysować wykres ![]() na odcinku
na odcinku ![]() .
.
Napiszemy zatem w Octave funkcję, która będzie wyznaczać wartości funkcji odwrotnej do ![]() dla dowolnego zadanego
dla dowolnego zadanego ![]() . Idea jest następująca: z definicji funkcji odwrotnej,
. Idea jest następująca: z definicji funkcji odwrotnej, ![]() , gdzie
, gdzie ![]() spełnia
spełnia ![]() , a więc
, a więc ![]() jest miejscem zerowym funkcji
jest miejscem zerowym funkcji
Aby dla zadanego ![]() znaleźć
znaleźć ![]() , wystarczy znaleźć miejsce zerowe skalarnej funkcji
, wystarczy znaleźć miejsce zerowe skalarnej funkcji ![]() — a to już powinno być łatwe, gdy skorzystamy z funkcji
— a to już powinno być łatwe, gdy skorzystamy z funkcji fzero. Powyższą ideę implementuje funkcja sigmainv z poniższego listingu.
function [S, fc] = sigmainv(z, M) if z == 0 S = 0; fc = 0; else [S, FS, info,out] = fzero(@(s)Fz(s,z,M), [0,1-eps/2]); if(info ~= 1) warning(['Klopoty dla z=', num2str(z), '; info=', num2str(info)]); end fc = out.funcCount; % zliczamy liczbe wywolan Fz end end % sigmainv function Z = Fz(S, z, M) % "z" jest parametrem Z = sigmafun(S, M)-z; end
Zanim przyjrzymy się meritum funkcji sigmainv, zwróćmy uwagę na kilka programistycznych szczegółów. Jak pamiętamy, fzero żąda funkcji jednego argumentu, dlatego, dla każdego zadanego ![]() , konstruujemy taką funkcję ad hoc — na podstawie trzyargumentowej
, konstruujemy taką funkcję ad hoc — na podstawie trzyargumentowej Fz(S,z,M) — korzystając z mechanizmu funkcji anonimowej: funkcja
f = @(s)Fz(s,z,M)jest funkcją jednej zmiennej, z wartościami
Fz określiliśmy zaś jako funkcję lokalną dla sigmainv. Wreszcie, aby uniknąć konsternacji fzero dla Jest oczywiste, że ![]() jest monotoniczna i może przyjmować wartości z przedziału
jest monotoniczna i może przyjmować wartości z przedziału ![]() . Dlatego wiedząc, że dla
. Dlatego wiedząc, że dla ![]() funkcja
funkcja ![]() jest nieokreślona, przedział lokalizujący miejsce zerowe ustaliliśmy na [0,1-
jest nieokreślona, przedział lokalizujący miejsce zerowe ustaliliśmy na [0,1-eps/2], gdyż 1-eps/2 jest największą liczbą maszynową mniejszą od 1 (dlaczego?).
Pozornie ,,asekurancki” sposób zdefiniowania funkcji sigmainv, w której zawsze sprawdzamy wartość parametru info zwracaną przez fzero, jest w istocie bardzo ważną i sensowną decyzją, pozwalającą wstępnie zweryfikować wyniki. Wszak nie wiemy a priori, czy nasz solver sobie poradzi z ![]() !
!
3.2. Transformacja zadania do wygodniejszej postaci
Chociaż wykres dostajemy bez trudu, stosując prostą metodę kontynuacji — biorąc za przybliżenie początkowe wartość z poprzedniego punktu wykresu (por. wykład z Matematyki Obliczeniowej II), to przychodzi nam nań czekać dość długo. Gdy ponownie spojrzymy na wykres ![]() , sprawa staje się jasna: przecież dla
, sprawa staje się jasna: przecież dla ![]() ,
, ![]() ma piekielnie stromy wykres, a to znacznie utrudnia działanie solvera powodując, że praktycznie ogranicza się on do metody bisekcji. Aby uniknąć tej niedogodności i znacząco przyspieszyć rysowanie wykresu, skorzystamy ze starej, dobrej zasady prowadzenia obliczeń numerycznych (i nie tylko):
ma piekielnie stromy wykres, a to znacznie utrudnia działanie solvera powodując, że praktycznie ogranicza się on do metody bisekcji. Aby uniknąć tej niedogodności i znacząco przyspieszyć rysowanie wykresu, skorzystamy ze starej, dobrej zasady prowadzenia obliczeń numerycznych (i nie tylko):
Gdy zadanie jest za trudne, należy zmienić… zadanie!
Tutaj po prostu zastąpimy ,,trudną” funkcję ![]() inną, ,,łatwiejszą”, ale o identycznych miejscach zerowych. Prosty rachunek pokazuje nam, że
inną, ,,łatwiejszą”, ale o identycznych miejscach zerowych. Prosty rachunek pokazuje nam, że ![]() jest rozwiązaniem równania
jest rozwiązaniem równania ![]() wtedy i tylko wtedy, gdy
wtedy i tylko wtedy, gdy ![]() jest miejscem zerowym funkcji
jest miejscem zerowym funkcji
 |
Różnica między ![]() a
a ![]() jest taka, że ta ostatnia jest prawie liniowa, więc rzeczywiście powinna być ,,łatwa” dla solvera równania nieliniowego. Przy okazji,
jest taka, że ta ostatnia jest prawie liniowa, więc rzeczywiście powinna być ,,łatwa” dla solvera równania nieliniowego. Przy okazji, ![]() nie ma już osobliwości: jest określona nawet dla
nie ma już osobliwości: jest określona nawet dla ![]() .
.
Wyznaczanie wartości ![]() przez znalezienie miejsca zerowego funkcji
przez znalezienie miejsca zerowego funkcji ![]() pokazuje szczegółowo kolejny listing.
pokazuje szczegółowo kolejny listing.
function [S, fc] = sigmainv2(z,M) if z == 0 S = 0; fc = 0; else [S, FS, info, out] = fzero(@(s)Gz(s,z,M), [0,1]); if(info ~= 1) warning(['Klopoty dla z=', num2str(z), '; info=', num2str(info)]); end fc = out.funcCount; % zliczamy liczbe wywolan Gz end end % sigmainv2 function Z = Gz(S, z, M) % "z" jest parametrem p = 2/(1-M); Z = 1 - S - ((p - S)./(p+z)).^(p/2); end
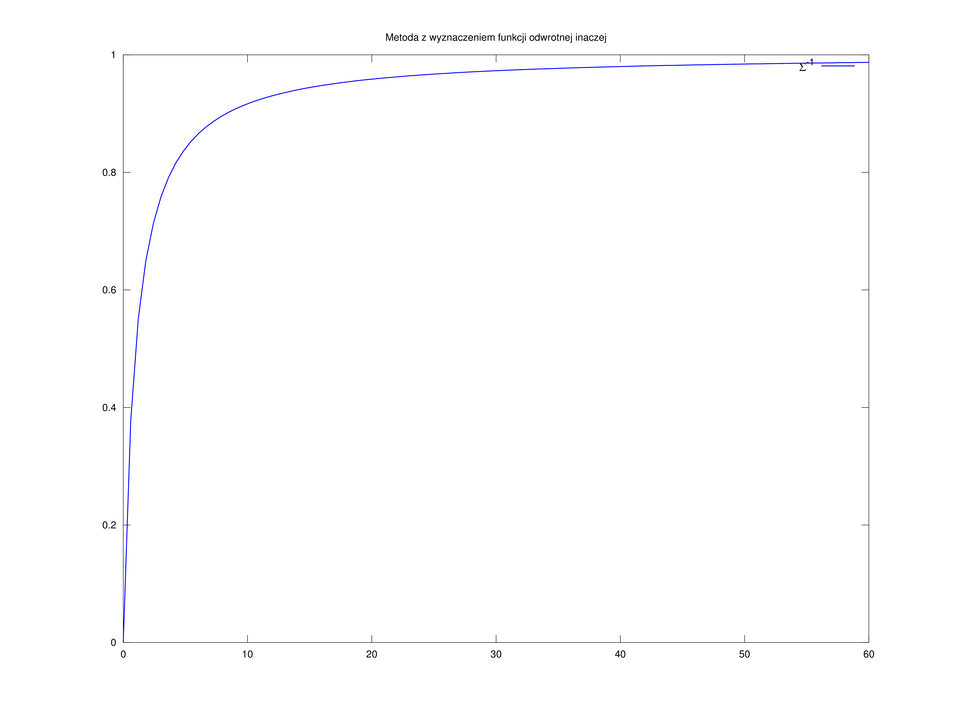
Faktycznie, dzięki tej zmianie wykres ![]() (rysunek 3.2) dostajemy trzy razy szybciej aniżeli w przypadku poprzedniego podejścia, przy liczbie wywołań funkcji
(rysunek 3.2) dostajemy trzy razy szybciej aniżeli w przypadku poprzedniego podejścia, przy liczbie wywołań funkcji ![]() sześciokrotnie mniejszej niż w przypadku
sześciokrotnie mniejszej niż w przypadku ![]() .
.
3.3. A może wystarczy po prostu… wziąć większy młotek?
Na zakończenie warto być może zauważyć, że w dzisiejszych czasach obliczenia są na tyle tanie, że nie zawsze warto odwoływać się do aż tak wyrafinowanych metod. Gdyby naszym głównym zadaniem było narysowanie, wyłącznie w celach poglądowych, jednego wykresu na odcinku ![]() , to zapewne byłoby nam dość obojętne, czy wyznaczymy sto, sto tysięcy, czy nawet milion wartości
, to zapewne byłoby nam dość obojętne, czy wyznaczymy sto, sto tysięcy, czy nawet milion wartości sigmafun: nasz komputer najpewniej i tak jest wystarczająco szybki, by z tym sobie błyskawicznie poradzić. Komenda logspace(k,m,N) pozwala wygenerować zestaw ![]() węzłów ,,równoodległych w skali logarytmicznej”, czyli postaci
węzłów ,,równoodległych w skali logarytmicznej”, czyli postaci ![]() , gdzie
, gdzie ![]() tworzą zestaw
tworzą zestaw ![]() równoodległych punktów z przedziału
równoodległych punktów z przedziału ![]() .
.
Generując więc zestaw punktów skupiających się wokół ![]() , a następnie wybierając tylko te, dla których
, a następnie wybierając tylko te, dla których ![]() :
:
N = 10000; s = 1-logspace(-13,0,N); % punkty zagęszczają się wykładniczo wokół 1 Z = sigmafun(s,M); good = find(Z<=60); % odrzucamy te, które wykraczają poza zakres zmiennej "z" plot(Z(good), s(good));
udałoby się nam w ten sposób (nawet jeszcze szybciej, niż poprzednimi metodami!) ,,dociągnąć” wykres ![]() do
do ![]() , co jest chyba całkiem niezłym wynikiem, jak na metodę brutalnej siły…
, co jest chyba całkiem niezłym wynikiem, jak na metodę brutalnej siły…
(Ale i tutaj ważne jest wyczucie: gdyby nieopatrznie położyć s = 1-logspace(-300,0,N), dostalibyśmy znacznie gorszy wynik).
Ćwiczenie 3.1
Czasami funkcja może być na tyle złośliwa, że zamiast zmieniać jest postać — jak to zrobiliśmy powyżej — możemy spróbować skorzystać z mniej wyrafinowanej, a za to ogólniejszej metody rozwiązywania równania nieliniowego ![]() . Taką bardzo prostą metodą, o minimalnych wymaganiach wobec
. Taką bardzo prostą metodą, o minimalnych wymaganiach wobec ![]() , jest metoda bisekcji (zadowoli się funkcją ciągłą, zmieniającą znak). Zaimplementuj metodę bisekcji i zobacz, jak sprawdzi się w warunkach naszego problemu dla oryginalnej funkcji
, jest metoda bisekcji (zadowoli się funkcją ciągłą, zmieniającą znak). Zaimplementuj metodę bisekcji i zobacz, jak sprawdzi się w warunkach naszego problemu dla oryginalnej funkcji ![]() .
.


