9. Warunki drugiego rzędu
W tym rozdziale przedstawimy warunki konieczne i dostateczne drugiego rzędu, tzn. warunki sformułowane w języku drugich pochodnych oraz podsumujemy dotychczasową wiedzę dotyczącą rozwiązywania problemów optymalizacyjnych z ograniczeniami mieszanymi.
9.1. Warunki drugiego rzędu
Rozważmy problem optymalizacyjny z ograniczeniami mieszanymi (8.1). Załóżmy, że pewnym punkcie ![]() spełniony jest warunek pierwszego rzędu, tzn. istnieją wektory
spełniony jest warunek pierwszego rzędu, tzn. istnieją wektory ![]() i
i ![]() , takie że
, takie że
 |
Definicja 9.1
Funkcją Lagrange'a nazywamy funkcję
 |
Możemy teraz zapisać warunek pierwszego rzędu w skróconej formie:
gdzie ![]() oznacza różniczkowanie względem zmiennej
oznacza różniczkowanie względem zmiennej ![]() .
.
Definicja 9.2
Zbiór
nazywamy zbiorem ograniczeń nierównościowych mocno aktywnych.
Zbiór
nazywamy zbiorem ograniczeń nierównościowych słabo aktywnych.
Twierdzenie 9.1 (Warunek konieczny drugiego rzędu)
Załóżmy, że punkt ![]() jest lokalnym rozwiązaniem problemu z ograniczeniami mieszanymi i spełniony jest w nim warunek liniowej niezależności. Niech
jest lokalnym rozwiązaniem problemu z ograniczeniami mieszanymi i spełniony jest w nim warunek liniowej niezależności. Niech ![]() ,
, ![]() będą mnożnikami Lagrange'a z warunku pierwszego rzędu. Jeśli
będą mnożnikami Lagrange'a z warunku pierwszego rzędu. Jeśli ![]() ,
, ![]() ,
, ![]() oraz
oraz ![]() ,
, ![]() , są klasy
, są klasy ![]() w otoczeniu
w otoczeniu ![]() , to
, to
dla każdego ![]() spełniającego
spełniającego
Dowód
Ustalmy ![]() jak w warunkach twierdzenia. Na mocy twierdzenia 8.5 istnieje
jak w warunkach twierdzenia. Na mocy twierdzenia 8.5 istnieje ![]() i krzywa
i krzywa ![]() klasy
klasy ![]() o następujących własnościach:
o następujących własnościach: ![]() ,
, ![]() , oraz dla
, oraz dla ![]() mamy
mamy ![]() ,
, ![]() , i
, i ![]() ,
, ![]() Wynika stąd, że funkcja
Wynika stąd, że funkcja ![]() równa jest
równa jest ![]() dla
dla ![]() w otoczeniu
w otoczeniu ![]() . Z ciągłości ograniczeń nieaktywnych wnioskujemy, że
. Z ciągłości ograniczeń nieaktywnych wnioskujemy, że ![]() dla
dla ![]() w otoczeniu
w otoczeniu ![]() . Zatem
. Zatem ![]() ma minimum lokalne w
ma minimum lokalne w ![]() , gdyż
, gdyż ![]() jest minimum lokalnym
jest minimum lokalnym ![]() na
na ![]() Na mocy założeń,
Na mocy założeń, ![]() jest klasy
jest klasy ![]() . Istnienie minimum w zerze implikuje, że
. Istnienie minimum w zerze implikuje, że ![]() , a więc
, a więc
To kończy dowód, gdyż w punkcie ![]() spełnione są warunki pierwszego rzędu:
spełnione są warunki pierwszego rzędu: ![]() .
.
Bez dowodu pozostawiamy następujące uogólnienie powyższego twierdzenia:
Podamy teraz warunek dostateczny istnienia rozwiązania lokalnego. Zwróćmy uwagę na to, że warunek ten implikuje, iż rozwiązanie jest ścisłe. Pozostaje więc szara strefa, gdzie jest spełniony warunek konieczny drugiego rzędu, lecz nie zachodzi warunek dostateczny drugiego rzędu. Podobnie jak w przypadku optymalizacji bez ograniczeń, na to nie ma niestety rady.
Twierdzenie 9.3 (Warunek dostateczny drugiego rzędu)
Załóżmy, że w punkcie ![]() spełniony jest warunek pierwszego rzędu, tzn. istnieją wektory
spełniony jest warunek pierwszego rzędu, tzn. istnieją wektory ![]() i
i ![]() , takie że
, takie że
|
(9.1) |
Załóżmy ponadto, że funkcje ![]() ,
, ![]() , oraz
, oraz ![]() ,
, ![]() są dwukrotnie różniczkowalne w
są dwukrotnie różniczkowalne w ![]() . Jeśli
. Jeśli
dla każdego ![]() spełniającego
spełniającego
 |
(9.2) |
to ![]() jest ścisłym rozwiązaniem lokalnym.
jest ścisłym rozwiązaniem lokalnym.
Zanim przejdziemy do dowodu podkreślmy, iż w powyższym twierdzeniu nie zakłada się regularności punktu ograniczeń.
Dowód twierdzenia 9.3
Przeprowadzimy dowód przez zaprzeczenie. Załóżmy mianowicie, że ![]() nie jest ścisłym rozwiązaniem lokalnym. Istnieje zatem ciąg punktów dopuszczalnych
nie jest ścisłym rozwiązaniem lokalnym. Istnieje zatem ciąg punktów dopuszczalnych ![]() , takich że
, takich że ![]() oraz
oraz ![]() . Zdefiniujmy
. Zdefiniujmy
Wówczas ![]() . Zauważmy, że
. Zauważmy, że ![]() . Z faktu
. Z faktu ![]() wynika, że istnieje podciąg
wynika, że istnieje podciąg ![]() zbieżny do pewnego
zbieżny do pewnego ![]() o normie jednostkowej. Aby uprościć notację zakładamy, że od początku
o normie jednostkowej. Aby uprościć notację zakładamy, że od początku ![]() był zbieżny do
był zbieżny do ![]() . Oczywiście z definicji
. Oczywiście z definicji ![]() wynika, że
wynika, że ![]()
W dalszej części dowodu wykażemy dwie własności ![]() : (a)
: (a) ![]() oraz (b)
oraz (b) ![]() spełnia warunki (9.2). A to przeczy założeniom twierdzenia.
spełnia warunki (9.2). A to przeczy założeniom twierdzenia.
Rozpocznijmy od dowodu własności (a). Z definicji drugiej pochodnej:
Przypomnijmy, że ![]() , bo
, bo ![]() oraz
oraz ![]() dla
dla ![]() . Z warunku pierwszego rzędu (9.1) wynika również, że
. Z warunku pierwszego rzędu (9.1) wynika również, że ![]() . Zatem
. Zatem
Przypomnijmy, że ![]() . Wstawiając tą reprezentację do powyższego wzoru dostajemy:
. Wstawiając tą reprezentację do powyższego wzoru dostajemy:
Dzielimy obie strony przez ![]() :
:
Przypomnijmy, że ![]() . A zatem w granicy, gdy
. A zatem w granicy, gdy ![]() , drugi składnik powyższej sumy dąży do
, drugi składnik powyższej sumy dąży do ![]() . Korzystając z faktu, że
. Korzystając z faktu, że ![]() dostajemy
dostajemy
co kończy dowód faktu (a).
W dowodzie własności (b) zastosujemy podobne podejście jak powyżej. Z różniczkowalności funkcji ![]() w punkcie
w punkcie ![]() mamy
mamy
Przypomnijmy, że ![]() , co implikuje
, co implikuje
Korzystając znów z reprezentacji ![]() dostajemy
dostajemy
Zatem w granicy, przy ![]() , otrzymujemy
, otrzymujemy ![]() . Zauważając, że
. Zauważając, że ![]() dla
dla ![]() i postępując podobnie jak powyżej dostajemy
i postępując podobnie jak powyżej dostajemy ![]() ,
, ![]() . Analogicznie również dowodzimy, że
. Analogicznie również dowodzimy, że ![]() dla
dla ![]()
Pomnóżmy obie strony pierwszej równości w (9.1) przez ![]() :
:
 |
Suma ta składa się z wyrazów nieujemnych. Ponieważ sumują się one do zera, to wszystkie muszą być zerowe. W szczególności
Dowiedliśmy zatem, że ![]() spełnia warunki (9.2).
spełnia warunki (9.2).
9.2. Podsumowanie
Opiszemy teraz ogólny algorytm postępowania w przypadku rozwiązywania problemów optymalizacyjnych z ograniczeniami mieszanymi.
Krok 1. Szukamy punktów podejrzanych:
| w punkcie |
|||
Krok 2. Sprawdzamy, czy w punktach ze zbiorów ![]() spełnione są założenia tw. 7.6, tzw. warunki dostateczne pierwszego rzędu. Jeśli tak, to w punktach tych są rozwiązania globalne. Pozostałe kroki podejmujemy, jeśli
spełnione są założenia tw. 7.6, tzw. warunki dostateczne pierwszego rzędu. Jeśli tak, to w punktach tych są rozwiązania globalne. Pozostałe kroki podejmujemy, jeśli
nie znaleźliśmy żadnego rozwiązania globalnego, lub
chcemy znaleźć wszystkie rozwiązania globalne, lub
chcemy znaleźć wszystkie rozwiązania lokalne.
Usuwamy ze zbiorów ![]() punkty, które są rozwiązaniami globalnymi. Oznaczmy nowe zbiory
punkty, które są rozwiązaniami globalnymi. Oznaczmy nowe zbiory ![]() .
.
Krok 3. Eliminujemy ze zbioru ![]() te punkty, gdzie nie zachodzi warunek konieczny drugiego rzędu. Pozostałe punkty oznaczamy
te punkty, gdzie nie zachodzi warunek konieczny drugiego rzędu. Pozostałe punkty oznaczamy ![]()
Krok 4. W każdym punkcie ze zbioru ![]() sprawdzamy warunek dostateczny drugiego rzędu. Punkty, w których jest spełniony, są rozwiązaniami lokalnymi.
sprawdzamy warunek dostateczny drugiego rzędu. Punkty, w których jest spełniony, są rozwiązaniami lokalnymi.
Krok 5. Optymalność punktów ze zbioru ![]() , w których nie jest spełniony warunek dostateczny drugiego rzędu sprawdzamy innymi metodami.
, w których nie jest spełniony warunek dostateczny drugiego rzędu sprawdzamy innymi metodami.
9.3. Przykład
W tym podrozdziale opiszemy bardzo dokładnie rozwiązanie następującego problemu optymalizacyjnego:
 |
gdzie ![]() jest parametrem.
jest parametrem.
Zauważmy, że w każdym punkcie, gdzie aktywne jest ograniczenie, spełniony jest warunek liniowej niezależności ograniczeń: pierwsza pochodna ograniczenia wynosi ![]() . Wynika stąd, że
. Wynika stąd, że ![]()
Funkcja Lagrange'a dla powyższego problemu ma postać:
Zapiszmy warunek pierwszego rzędu:
| (9.3) | ||||
| (9.4) | ||||
Sprawdźmy, czy możliwe jest ![]() . Wówczas z równania (9.3) dostajemy
. Wówczas z równania (9.3) dostajemy
co pociąga ![]()
![]() Punkt ten nie jest dopuszczalny: nie spełnia warunku nierównościowego dla żadnego
Punkt ten nie jest dopuszczalny: nie spełnia warunku nierównościowego dla żadnego ![]() . Wnioskujemy zatem, że
. Wnioskujemy zatem, że ![]() i warunek konieczny pierwszego rzędu może być spełniony tylko w punktach, w których ograniczenie nierównościowe jest aktywne:
i warunek konieczny pierwszego rzędu może być spełniony tylko w punktach, w których ograniczenie nierównościowe jest aktywne:
| (9.5) |
Rozpiszmy równanie (9.3):
 |
Z drugiego równania wynika, że albo ![]() albo
albo ![]() Jeśli
Jeśli ![]() to z (9.5) dostajemy
to z (9.5) dostajemy ![]() Punkt
Punkt ![]() wraz z mnożnikiem Lagrange'a
wraz z mnożnikiem Lagrange'a ![]() spełnia warunek pierwszego rzędu.
spełnia warunek pierwszego rzędu.
Rozważmy teraz przypadek ![]() . Wówczas z równania
. Wówczas z równania ![]() dostajemy
dostajemy ![]() Jeśli
Jeśli ![]() , to
, to ![]() i równanie (9.5) nie ma rozwiązania. Dla
i równanie (9.5) nie ma rozwiązania. Dla ![]() dostajemy punkt
dostajemy punkt ![]() , zaś dla
, zaś dla ![]() dwa punkty
dwa punkty
Podsumowując: ![]() oraz
oraz
Funkcja ![]() nie jest quasi-wypukła, wiec nie możemy skorzystać z twierdzenia 7.6 stwierdzającego dostateczność warunku pierwszego rzędu. Zatem
nie jest quasi-wypukła, wiec nie możemy skorzystać z twierdzenia 7.6 stwierdzającego dostateczność warunku pierwszego rzędu. Zatem ![]() .
.
Przechodzimy do kroku 3 i sprawdzamy warunek konieczny drugiego rzędu dla punktów z ![]() . Rozważmy najpierw punkt
. Rozważmy najpierw punkt ![]() Odpowiada mu mnożnik Lagrange'a
Odpowiada mu mnożnik Lagrange'a ![]() Pierwsza pochodna funkcji Lagrange'a ma postać:
Pierwsza pochodna funkcji Lagrange'a ma postać:
Macierz drugich pochodnych to;
Na mocy twierdzenia wystarczy sprawdzić, że
dla wektorów ![]() spełniających
spełniających ![]() , czyli takich że
, czyli takich że ![]() Wstawiając do powyższej nierówności dostajemy
Wstawiając do powyższej nierówności dostajemy ![]() Nierówność ta zachodzi dla
Nierówność ta zachodzi dla ![]() : w punkcie
: w punkcie ![]() może być rozwiązanie lokalne. Dla
może być rozwiązanie lokalne. Dla ![]() nierówność nie zachodzi, więc w
nierówność nie zachodzi, więc w ![]() nie ma rozwiązania lokalnego.
nie ma rozwiązania lokalnego.
Załóżmy teraz ![]() i rozważmy dwa pozostałe punkty. W obu przypadkach mnożnik Lagrange'a
i rozważmy dwa pozostałe punkty. W obu przypadkach mnożnik Lagrange'a ![]() . Mamy zatem
. Mamy zatem
Macierz drugich pochodnych jest nieujemnie określona, więc warunek konieczny drugiego rzędu jest spełniony w obu punktach. Podsumowując:
Przechodzimy do sprawdzenia warunku dostatecznego drugiego rzędu. W przypadku ![]() macierz drugich pochodnych funkcji Lagrange'a jest dodatnio określona, więc na mocy tw. 9.3 w punkcie
macierz drugich pochodnych funkcji Lagrange'a jest dodatnio określona, więc na mocy tw. 9.3 w punkcie ![]() jest ścisłe rozwiązanie lokalne. Niestety nie możemy nic powiedzieć o punkcie
jest ścisłe rozwiązanie lokalne. Niestety nie możemy nic powiedzieć o punkcie ![]() , gdy
, gdy ![]()
Rozważmy przypadek ![]() Zajmijmy się punktem
Zajmijmy się punktem ![]() Musimy sprawdzić warunki tw. 9.3:
Musimy sprawdzić warunki tw. 9.3:
dla ![]() spełniającego
spełniającego ![]() czyli
czyli ![]() A zatem jeśli
A zatem jeśli ![]() , to
, to ![]() i w punkcie
i w punkcie ![]() spełniony jest warunek dostateczny drugiego rzędu:
spełniony jest warunek dostateczny drugiego rzędu: ![]() jest ścisłym rozwiązaniem lokalnym. Analogicznie dowodzimy, że punkt
jest ścisłym rozwiązaniem lokalnym. Analogicznie dowodzimy, że punkt ![]() jest również ścisłym rozwiązaniem lokalnym.
jest również ścisłym rozwiązaniem lokalnym.
Pozostaje jeszcze przypadek ![]() Choć
Choć ![]() jest rozwiązaniem globalnym, to nie udało nam się tego pokazać korzystając z teorii Kuhna-Tuckera. Łatwo można to jednak udowodnić bezpośrednio.
jest rozwiązaniem globalnym, to nie udało nam się tego pokazać korzystając z teorii Kuhna-Tuckera. Łatwo można to jednak udowodnić bezpośrednio.
9.4. Zadania
Ćwiczenie 9.1
Rozwiąż geometrycznie i analitycznie zadanie minimalizacji ![]() na zbiorze
na zbiorze ![]()
Ćwiczenie 9.2
Niech ![]() będzie macierzą
będzie macierzą ![]() o pełnym rzędzie (tzn. o rzędzie równym
o pełnym rzędzie (tzn. o rzędzie równym ![]() ). Udowodnij, że rzut na jądro
). Udowodnij, że rzut na jądro ![]() jest przekształceniem liniowym zadanym wzorem
jest przekształceniem liniowym zadanym wzorem
W dowodzie wykorzystaj fakt, że rzeczony rzut, to taki punkt zbioru ![]() , który jest najmniej oddalony od rzutowanego punktu.
, który jest najmniej oddalony od rzutowanego punktu.
Ćwiczenie 9.3
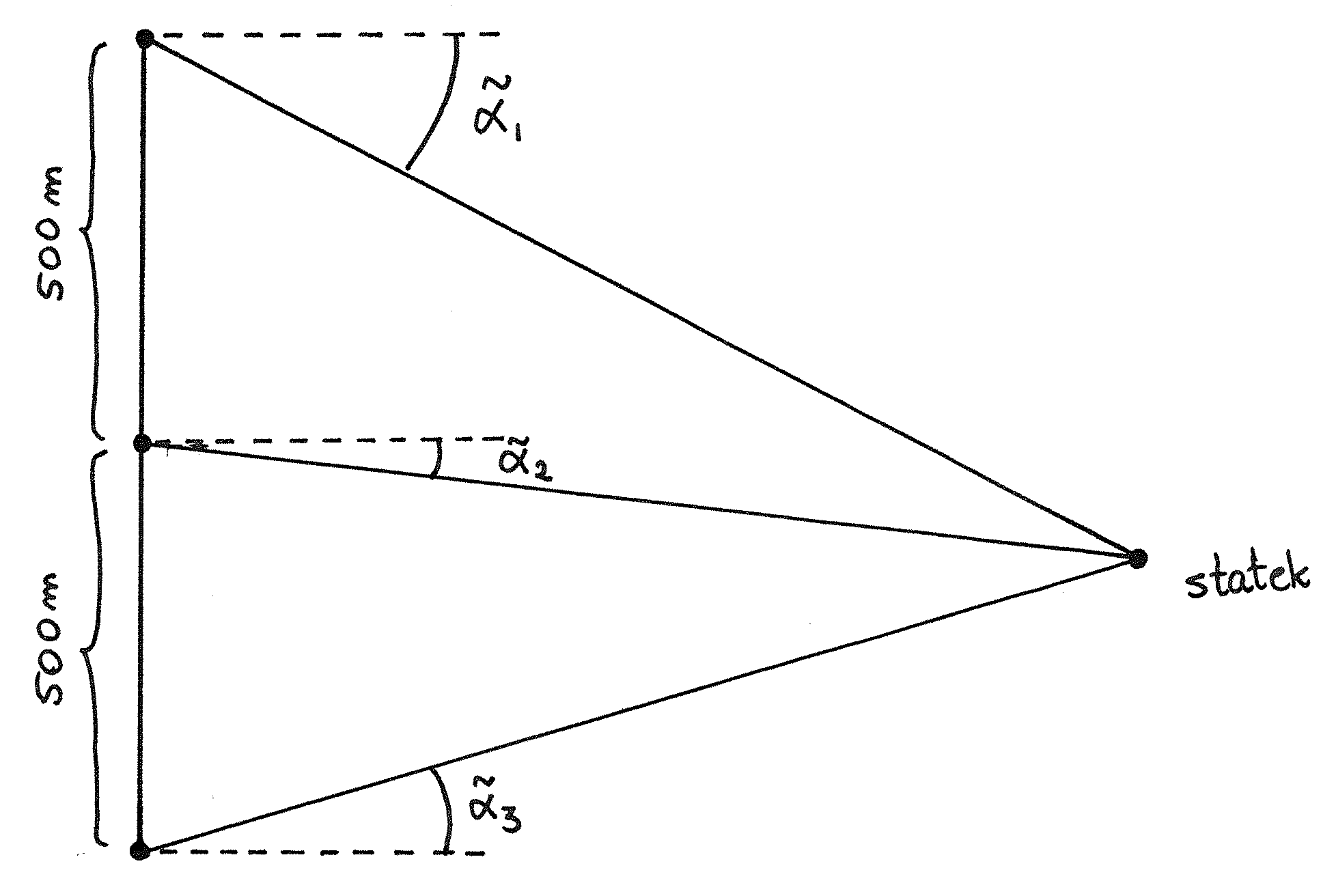
Na brzegu będącym prostym odcinkiem co ![]() metrów stoją trzy stacje pomiarowe, patrz rys. 9.1. Każda z nich mierzy kąt między prostą prostopadłą do brzegu a prostą przechodzącą przez punkt pomiarowy i statek. Wyniki obserwacji są następujące:
metrów stoją trzy stacje pomiarowe, patrz rys. 9.1. Każda z nich mierzy kąt między prostą prostopadłą do brzegu a prostą przechodzącą przez punkt pomiarowy i statek. Wyniki obserwacji są następujące:
Pomiary te są obarczone małymi błędami. Skoryguj je tak, aby były zgodne tzn. wskazywały na ten sam punkt na płaszczyźnie i korekta była jak najmniejsza w sensie średniokwadratowym (suma kwadratów różnic pomiędzy zmierzonymi kątami i skorygowanymi kątami). Znajdź położenie statku względem punktów pomiarowych. W obliczeniach przyjmij, że ![]() dla małych kątów
dla małych kątów ![]() .
.
Ćwiczenie 9.4
Metalowa belka ma przekrój trapezoidalny. Pole tego przekroju ze względów wytrzymałościowych musi wynosić ![]() . Górna i boczna powierzchnia musi zostać zabezpieczona antykorozyjnie. Ustal tak kształt przekroju, aby powierzchnia do zabezpieczenia antykorozyjnego była jak najmniejsza.
. Górna i boczna powierzchnia musi zostać zabezpieczona antykorozyjnie. Ustal tak kształt przekroju, aby powierzchnia do zabezpieczenia antykorozyjnego była jak najmniejsza.


